自动模式¶
在 "自动 "模式下,飞行器将执行存储在(飞行)控制器中的预设任务,该任务由导航指令(即航点)和 "执行 "指令(即不影响飞行器位置的指令,包括触发相机快门)组成。
该模式要求载具具有 全球定位系统 和/或 视觉辨识 或 轮编码器.
创建使命¶
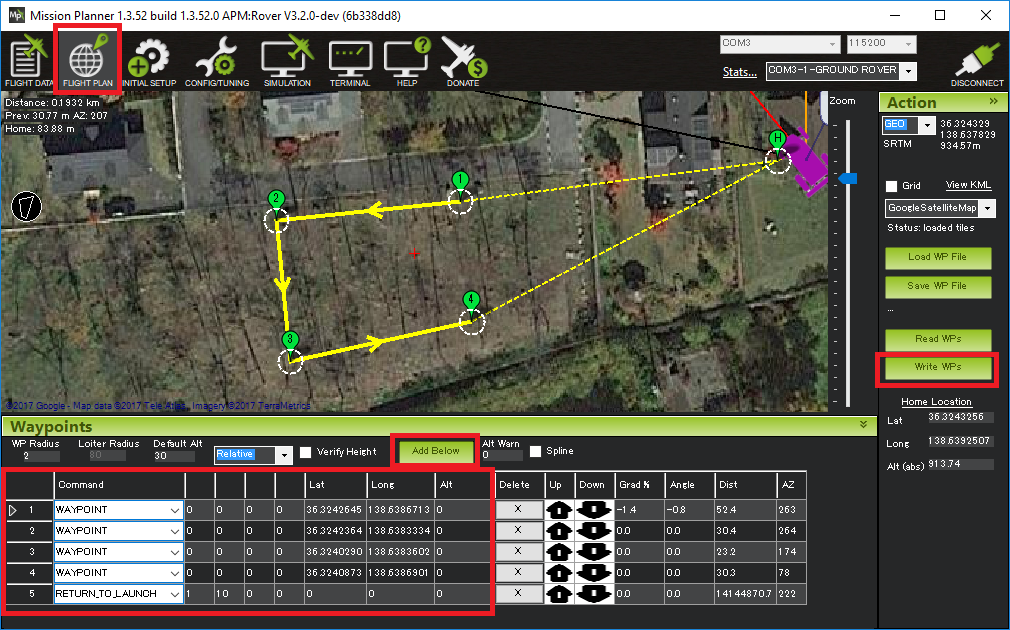
大多数地面站都能创建和上传飞行任务。Mission Planner地面站可通过飞行规划器屏幕实现这一功能:
使用 USB 电缆或遥测技术将(飞行)控制器连接到个人电脑
打开电脑上的Mission Planner地面站,按下连接按钮
进入 Flight Planer(飞行计划器)屏幕,点击地图上的几个地方以添加航点
在命令列表部分,单击列表中的最后一条航点命令并按下 "添加到下面 "按钮,一个新命令 WAYPOINT 命令就会出现在列表底部。
点击 "WAYPOINT",将命令改为 "RETURN_TO_LAUNCH
使用 "编写 WPs "按钮将任务上传到(飞行)控制器。
开始任务¶
应按照以下说明启动任务:
以 "踢 "启动任务¶
任务通常在载具切换到自动模式的瞬间启动,但也可以通过设置 自动启动 参数的加速度,单位为 m/s/s。一般情况下,2 m/s/s 的值即可。
速度引导¶
在飞行器执行任务时,用户可以通过将发射器的油门杆提高到 75% 到 100% 之间来增加飞行器的速度。在 75% 时,飞行器将保持配置速度(即 WP_SPEED 或 巡航 如果 WP_SPEED 为零,3.5.1 之后的 Rover 版本仅使用 WP_SPEED),当驾驶员的油门杆达到 100%时,速度会线性增加到载具的最大速度。
任务结束¶
如果任务在航点上结束,那么它将切换到由 行为不端 参数。可以通过改变遥控模式开关或地面控制站来改变该模式。
恢复或重启任务¶
如果任务中断(例如,用户在飞行器完成任务前将其从自动模式中切换出来),最后执行的命令将被存储,当飞行器下次返回自动模式时,将从该命令开始重新执行任务。注意: 解除飞行器上膛或重启(飞行)控制器会将任务重置回第一条命令。
如果您希望任务总是从头开始,请设置 错误重启 参数为 "1"。
设置活动指令¶
飞行器在 "自动 "状态下执行任务时,可以从地面站更改活动指令。如果使用Mission Planner地面站,则可通过飞行数据>>操作选项卡上的 "设置 WP "按钮进行更改。

飞行稳定调整¶
有关如何调整控制器以实现良好的航点控制的详细信息,请参见 飞行稳定调整导航 page.