加载固件¶
本说明将向您介绍如何将最新固件下载到已安装 ArduPilot 固件的(飞行)控制器硬件上。此过程将使用 Mission Planner 地面控制站。请参见 在没有现有 ArduPilot 固件的电路板上加载固件.
备注
对于某些(飞行)控制器,可以通过以下方法更新固件 从 SD 卡闪存
安装步骤¶
将(飞行)控制器连接到计算机¶
一旦您 安装地面站 在计算机上使用 USB 电缆连接(飞行)控制器,如下图所示。请使用计算机上的直接 USB 端口(不要使用 USB 集线器)。

Pixhawk USB 连接¶
Windows 应该会自动检测并安装正确的驱动程序软件。
选择 COM 端口¶
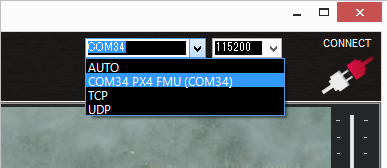
如果使用 Mission Planner地面站 作为 GCS,选择窗口右上角 COM 端口下拉菜单,靠近 连接 按钮。选择 自动 或电路板的特定端口。将波特率设置为 115200 如图所示。不要撞击 连接 还没有。
安装固件¶
在Mission Planner地面站的 设置 | 安装固件 在屏幕上选择与您的载具或车架类型(如 Quad、Hexa)相匹配的相应图标。回答问题 是 当它问你 "你确定吗?
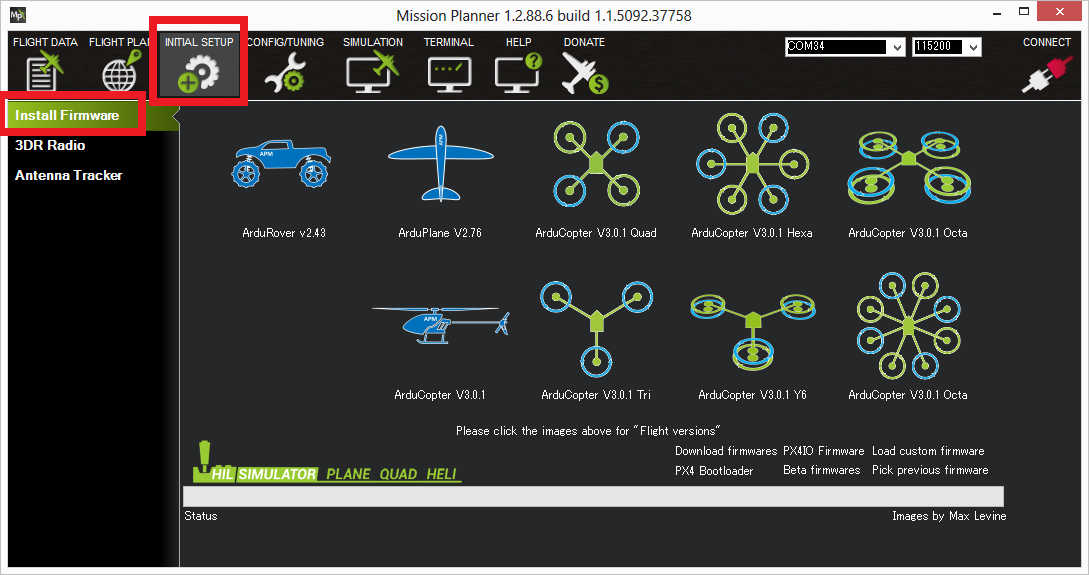
Mission Planner地面站:安装固件屏幕¶
备注
有些电路板专门针对特定载具类型,固件不会自动为其他载具构建。不过,ArduPilot 仍然可以使用 定制固件服务器.
Mission Planner地面站将尝试检测您使用的板。它可能会要求您拔下电路板,按 "确定",然后再插上以检测电路板类型。
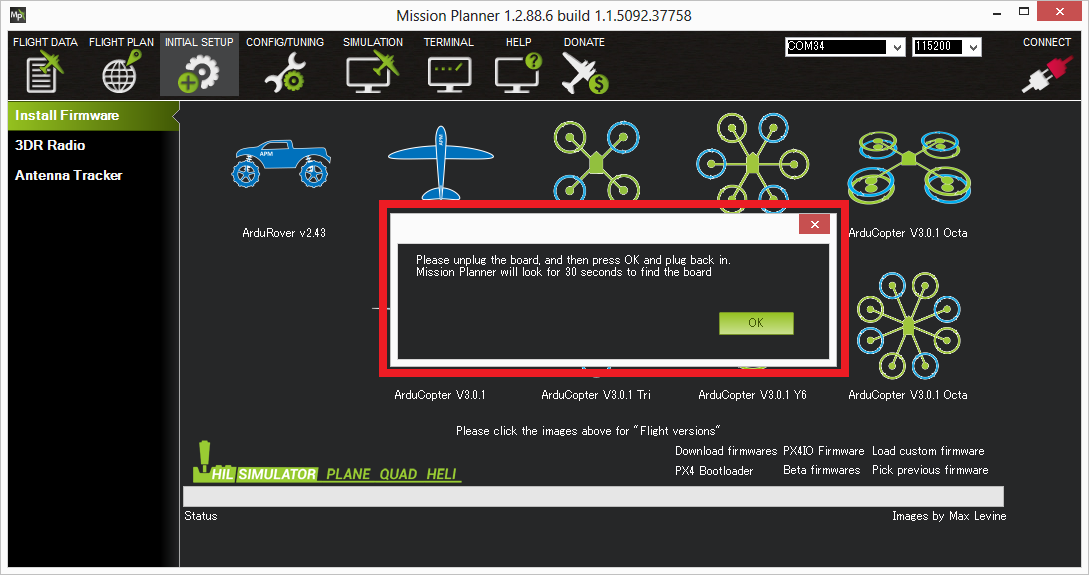
Mission Planner地面站:安装固件提示¶
通常情况下,您会看到一个板卡固件变体的下拉框,您可以从中进行选择(如双向 DShot 变体(如果可用))。对于共享 Pixhawk 板 ID 的板,列表将非常广泛,如下所示:
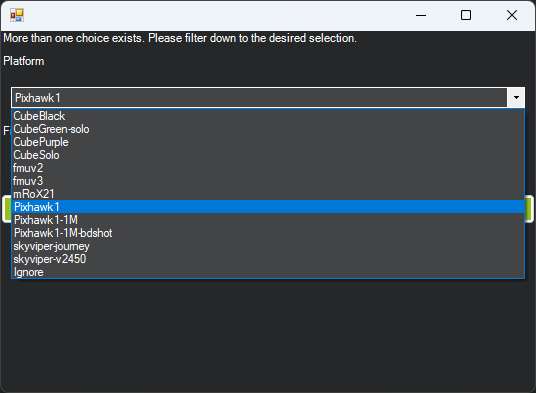
为电路板选择合适的固件。对于标有 "Pixhawk "的电路板,Pixhawk1 固件通常是最佳选择。
警告
某些标注为 Pixhawk 2.4.x 的板可能有传感器替换,这可能导致臂前检查或无辅助 IMU。请参阅 BARO_OPTIONS 参数,了解某些电路板上已知传感器替换的解决方法,这些电路板上的气压计为 MS5607,而应使用 MS5611。IMU 也可以替代。请尽可能从 ArduPilot 合作伙伴处采购(飞行)控制器。
如果一切顺利,你会看到右下方出现一个状态,包括 "擦除"、"编程"、"验证 "和 "上传完成":"擦除..."、"编程..."、"验证... "和 "上传完成"。固件已成功上传到电路板。
编程或开机后,引导加载程序通常需要几秒钟才能退出并输入主代码。请等待按下 CONNECT(连接)键,直到出现这种情况。
备注
将固件更新到新版本并不会改变现有参数,除非固件用于不同的飞行器,在这种情况下,参数会重置为该飞行器的默认值。不过,最好还是使用Mission Planner地面站上的 "保存到文件 "按钮将参数保存到文件中。 配置/完整参数树 选项卡,以防更新时出现问题。升级到新版本后不要应用所有参数,因为某些参数的含义可能不同。
使用测试版、开发版和定制版¶
Beta¶
之前 稳定 释放、 Beta 版本发布。如果您想尝试更新的功能或帮助开发人员测试新代码,可以使用这些版本。由于这些是 "测试 "版本,因此可能仍然存在错误。即使在稳定版固件中也有可能出现这种情况。不过,Beta 版已经过开发团队的测试,并已经过飞行测试。该版本允许更广泛的用户群在发布稳定版之前对固件进行最终测试。 稳定.我们鼓励有经验的 ArduPilot 用户试飞该固件并提供反馈意见。
Mission Planner地面站的 安装固件 页面上传此版本,但后来 稳定 可能已经发布。请务必先检查正常载具上传选项。
最新开发人员版本¶
这反映了 ArduPilot 代码开发分支的当前状态。它已经过开发团队的审核,通过了所有自动测试套件,并在大多数情况下进行了试飞。该代码每天都在构建,可供有经验的用户测试。这相当于 "alpha "版本,可能会有错误,但很少会导致 "崩溃"。在更改或引入新功能后,很快就会发布 即将推出的功能 维基版块将更新有关新增或更改的信息。
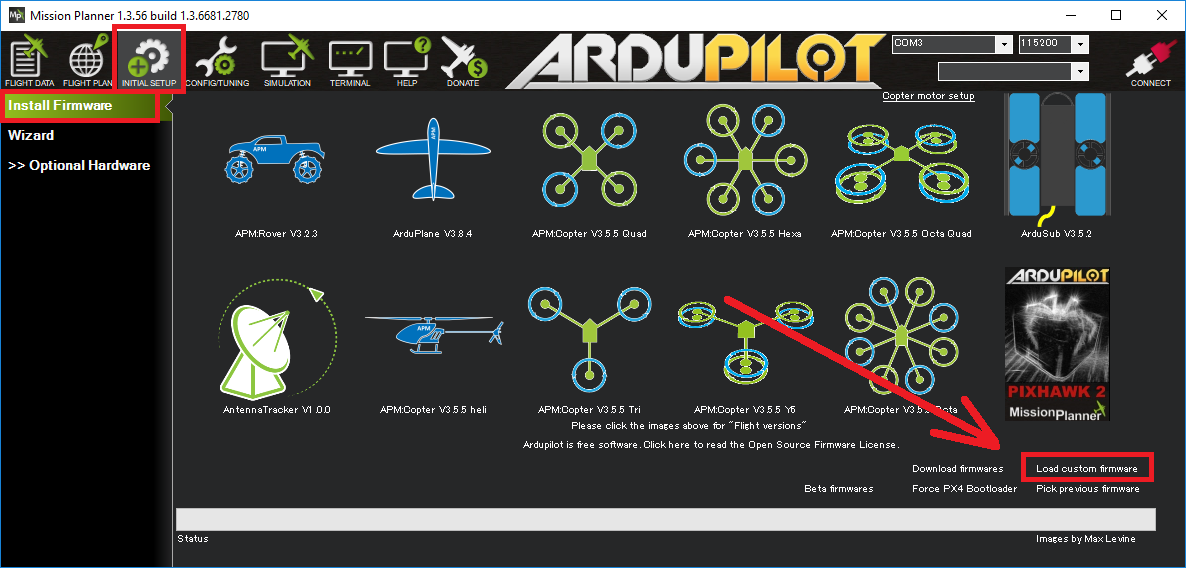
必须从 固件下载 王牌页 最新 然后使用Mission Planner地面站上的 "加载自定义固件 "选项上传。 安装固件页面
定制固件构建服务器¶
ArduPilot 目前正在试验性地测试一个自定义固件构建服务器,该服务器将允许用户为其(飞行)控制器生成具有可选功能的固件构建。由于所有 1MB 闪存大小的电路板现在都有功能限制,以便代码能够适应,这将提供一个路径,使用户能够选择哪些功能将被包含或不被包含,从而为 1MB (飞行)控制器的用户提供一定的灵活性。
服务器位于 这里
它允许创建自定义构建,可下载并通过Mission Planner地面站上的 "加载自定义固件 "选项闪存到(飞行)控制器上。 安装固件页面.
使用 USB 电缆将地面站 PC 与(飞行)控制器连接起来
选择电路板的 COM 端口和波特率(通常为 115200,如果硬件允许,也可以选择更高的波特率)。这些在屏幕右上方选择。操作 不 按下连接按钮
进入 MP 固件安装屏幕(选择 "设置>>安装固件)
单击 "Load custom firmware(加载自定义固件)"链接并选择下载的 .apj 文件(不要选择 .hex 文件,它们只能用于 DFU/JTAG/SWD 方法)。如果 "加载自定义固件 "链接不可见,请选择 "Config >>Planner(配置>>计划器)"并将 "Layout(布局)"下拉菜单设为 "Advanced(高级)"。
在上述步骤之前,您可能需要点击 "强制启动加载程序"(假设电路板先前已用 Ardupilot 的启动加载程序刷新过)。
按照显示的任何有关插拔电路板的说明操作
如果一切顺利,屏幕下方应显示一些状态,如 "擦除..."、"编程..."、"验证... "和 "上传完成"。
固件限制¶
有关哪些功能的列表 不 包括在任何特定(飞行)控制器的当前 "最新 "固件中,请参见 本页.
目前的所有功能选项 不 默认情况下,1MB (飞行)控制器中包含的功能都在定制固件构建服务器的选项列表中。此外,1MB (飞行)控制器中还包含许多您的应用程序可能不需要的功能。因此,可以创建一个包含一些当前排除功能的构建,同时删除一些不需要的功能。功能选项列表将不断扩大,允许在自定义构建中删除其他大型功能并添加更多受限功能。例如,不包含 QuadPlane 功能将为不需要该功能的飞机节省空间。可以单独选择驱动程序和外设支持,只允许在代码中使用这些驱动程序和外设,从而允许在定制固件中包含其他功能。
当前构建仅来自每日主分支("最新")。将来,稳定版和测试版分支都可以选择。
测试¶
您可以通过切换到 任务计划飞行数据 屏幕并按下 连接 按钮。倾斜棋盘时,HUD 应该会更新。
将Mission Planner地面站连接到(飞行)控制器 有更多关于连接Mission Planner地面站的信息。