ArduPilot 旋翼飞行器¶
要成功使用 Copter,必须阅读并遵守本文档中的 "首次设置 "和 "首次飞行和调试 "部分!

这就是全功能版、 开放源代码 多旋翼无人飞行器控制器 Sparkfun 2013 和 2014 年自主载具竞赛 (占据前五名)。来自全球各地的开发人员团队正在不断改进和完善 ArduCopter 的性能和功能。 |
Copter 能够满足从快节奏的 FPV 赛车到流畅的航拍,以及完全自主的复杂任务等各种飞行要求,可通过一些兼容的软件地面站进行编程。整个软件包的设计安全、功能丰富、开放式定制应用,即使是新手也能轻松使用。 |
|

|
提示
了解最新的 ArduPilot 相关博客,请访问 ArduPilot.org!
系统组件¶
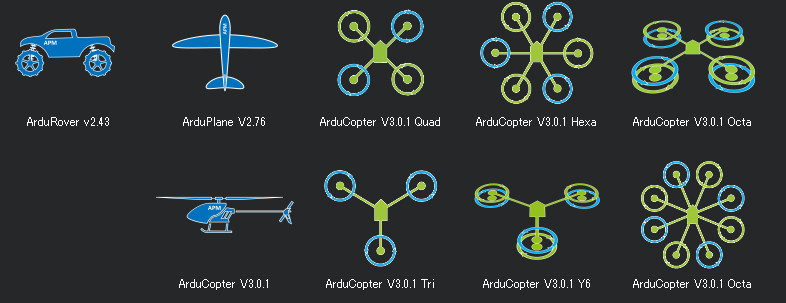
转子工艺类型¶

|

|
利用独立电机螺旋桨装置的差动推力管理,提供升力和方向控制
得益于机械结构简单和设计灵活
能在强风条件下正常工作的有效载荷升降机
冗余升降源可提高安全系数
不同的外形尺寸方便有效载荷的安装。
通常使用带有两个或更多叶片的单提升旋翼
通过伺服驱动机械联动装置改变叶片间距来保持方向控制(这些飞行器有许多版本,本手册无法涵盖所有版本 - 旋翼飞行器使用的机械系统值得特别研究和考虑)。
坚固、快速、高效,是适合多种任务的可靠工具。
由于采用开放式设计,Copter 还支持更多不同寻常的框架类型,包括 单旋翼和同轴旋翼机.将其与 固定翼飞行器, 无人车UGV 和 天线跟踪器 这样,你就拥有了一个机器人载具系统,可以通过非常相似的界面进行控制,完成各种各样的任务。
获取更多信息¶
继续前往 本维基介绍部分.
使用 ArduPilot 讨论服务器论坛 提出支持问题和建议。
要参与软件平台的开发,请访问 ArduPilot 开发指南.
提示
本维基的简体中文版摘要请查看 ArduPilot.org 合作伙伴 CUAV!