首页
旋翼飞行器
固定翼飞行器
无人车UGV
飞艇
潜航器
天线跟踪器
Mission Planner地面站
APM Planner 2
MAVProxy
配套计算机
开发人员
下载
Mission Planner地面站
APM Planner 2
高级用户工具
开发人员工具
固件
社区
支持论坛
在 Facebook 上
开发人员聊天室(Discord)
开发人员语音(Discord)
联系我们
参与
商业支持
开发团队
无人机系统培训中心
商店
关于
新闻
历史
许可证
商标
致谢
维基编辑指南
合作伙伴计划
旋翼飞行器
旋翼飞行器简介
选择(飞行)控制器
地面控制站
首次设置
首飞和调试
传统旋翼飞行器
任务规划
为任务记录航点
利用航点和事件规划任务
旋翼飞行器任务指令列表
任务指令列表
自动任务中的相机控制
集结点
使用Mission Planner地面站为图像添加地理标记
地形跟踪
续发
着陆后继续执行任务
如果出现问题
高级配置
外围硬件
其他信息
用户警报
个人
合作伙伴
SWAG 商店
旋翼飞行器
地面控制站
任务规划
在 GitHub 上编辑
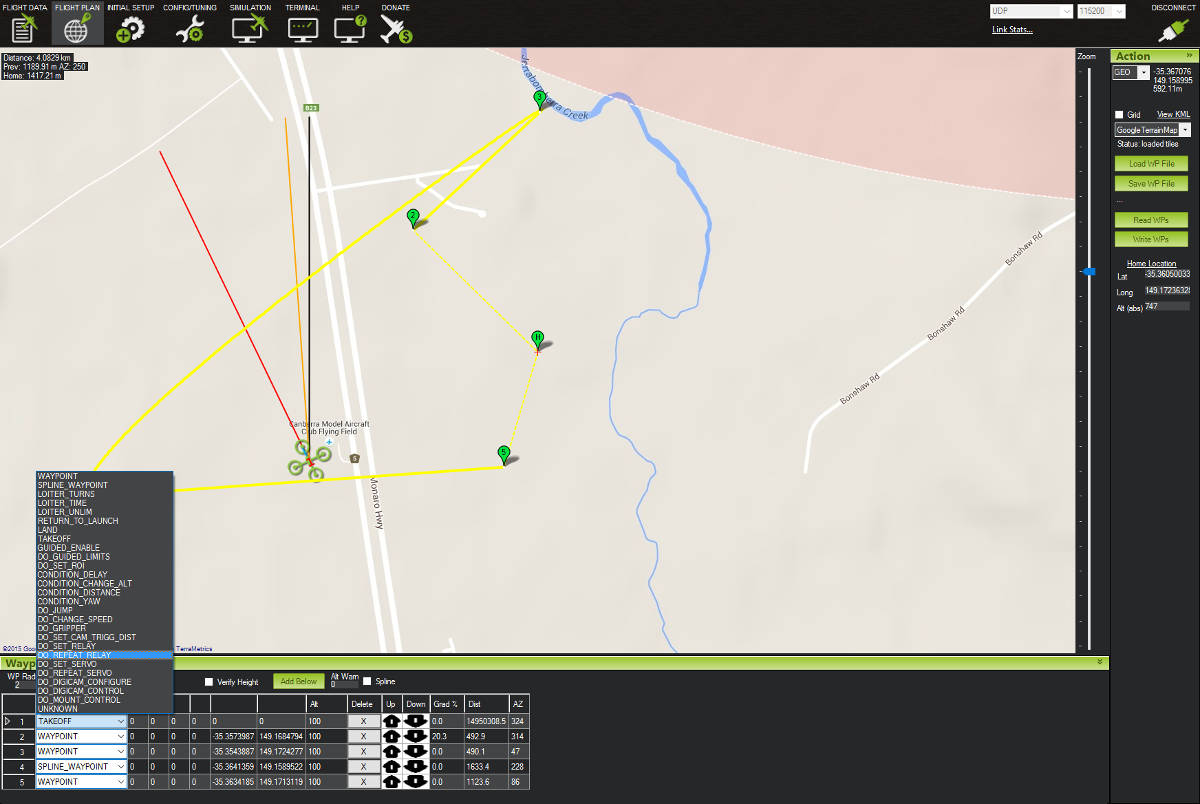
任务规划
¶
本节包含有关创建任务的文章,这些任务将在载具切换到
自动
模式。
备注
说明的重点是
Mission Planner地面站
但主要概念适用于其他
地面控制站
以及
为任务记录航点
利用航点和事件规划任务
旋翼飞行器任务指令列表
任务指令列表
自动任务中的相机控制
集结点
使用Mission Planner地面站为图像添加地理标记
地形跟踪
续发
着陆后继续执行任务