电机和伺服连接¶
支持两种转向/油门方法,每种方法所需的接线和配置略有不同,如下所述。
转向和油门分离¶
大多数遥控车与全尺寸载具一样,都有独立的转向和油门控制装置。对于这些漫游车,转向伺服器(通常用于转动前轮)应连接到(飞行)控制器的遥控输出 1。 电机的电调(通常用于控制后轮的速度)应连接到遥控输出 3。
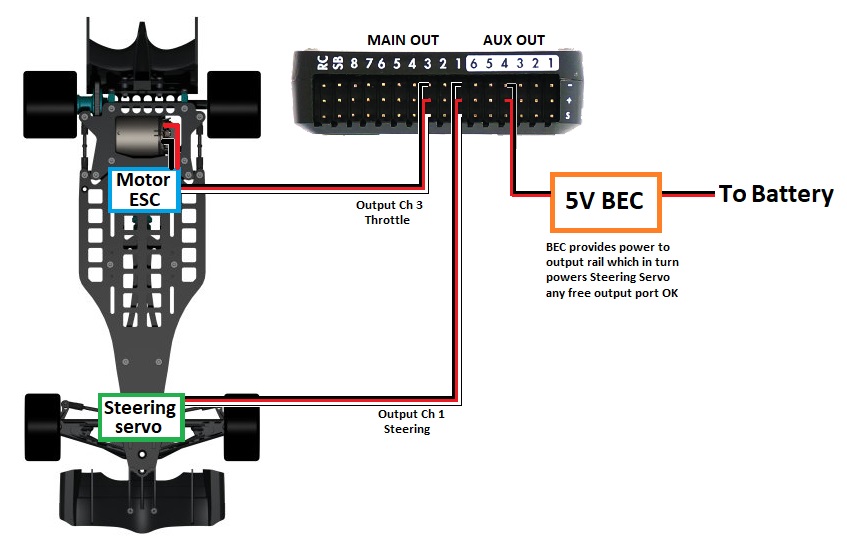
在此设置中,应设置这些参数值(它们实际上应为默认设置)。更多详情请查看 电机和伺服配置 page.
servo1_function = 26(地面转向)
servo3_function = 70(节流阀/电门)
防滑转向¶
"滑移转向 "载具(如 R2D2)通过改变两个(或更多)独立车轮的速度来控制方向和前进/后退运动。对于这类漫游车,左轮应连接到遥控输出 1,右轮应连接到遥控输出 3。
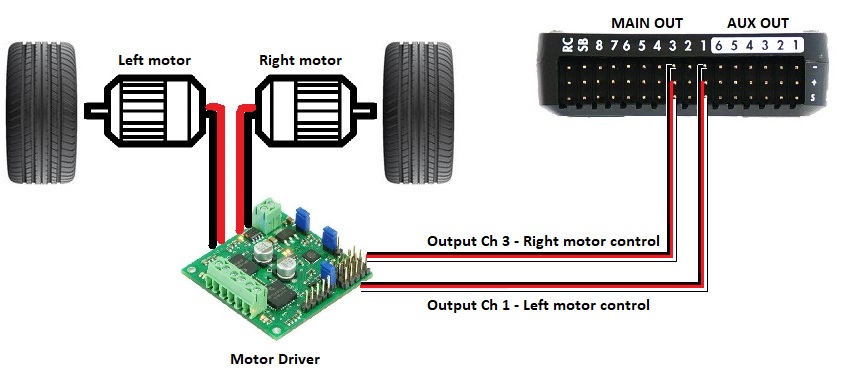
为此,需要设置这些参数值。更多详情可参阅 电机和伺服配置 page.
servo1_function = 73(左节流阀)
servo3_function = 74(节流阀右侧)
全能载具¶
全向飞行器可以借助全向车轮在不改变方向的情况下横向移动(即左右移动)(见图 1)。像这些来自 RobotShop)或推进器。ArduPilot 支持 X、Plus 和 "3 "三种配置。应连接到每个电机的(飞行)控制器电机输出如下所示。
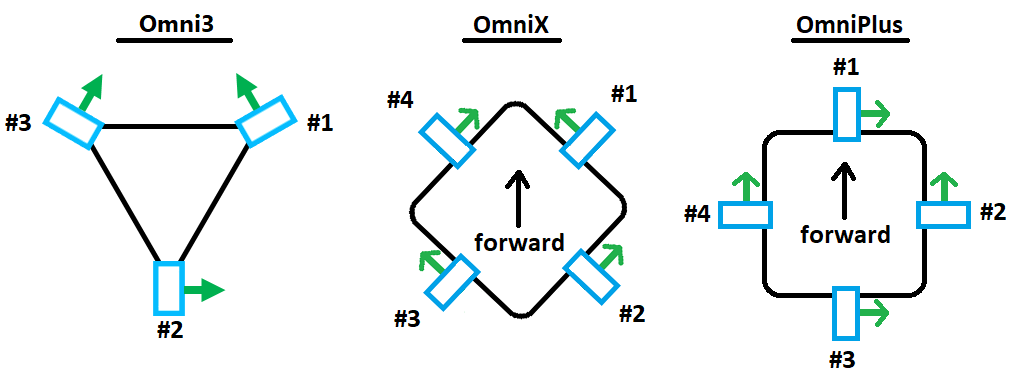
为此,需要设置以下参数值
框架类型 = 1(Omni3)、2(OmniX)或 3(OmniPlus)
servo1_function = 33(电机1)
servo2_function = 34(电机2)
servo3_function = 35(电机3)
servo4_function = 36(电机4)
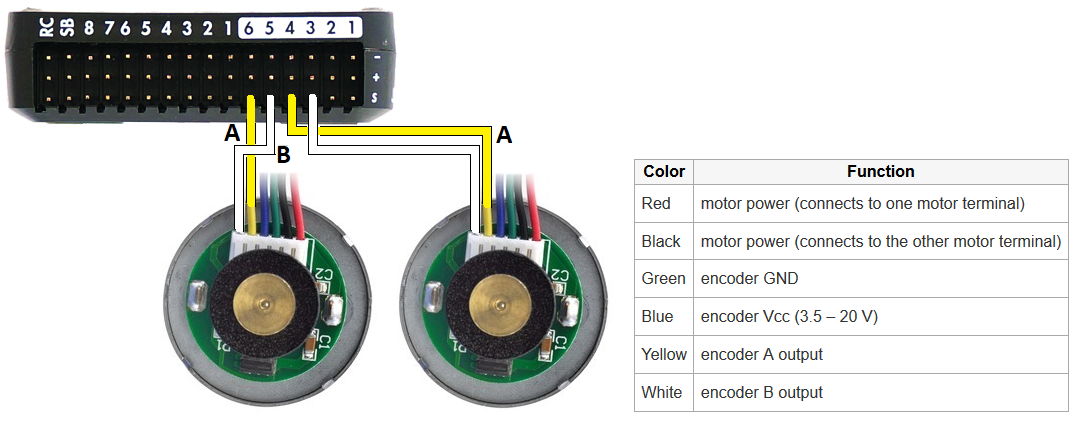
轮编码器¶
最多可将两个车轮编码器连接到(飞行)控制器上,具体连接方式请参阅 "(飞行)控制器"。 可选硬件/滚轮编码器 page.