典型(飞行)控制器接线连接¶
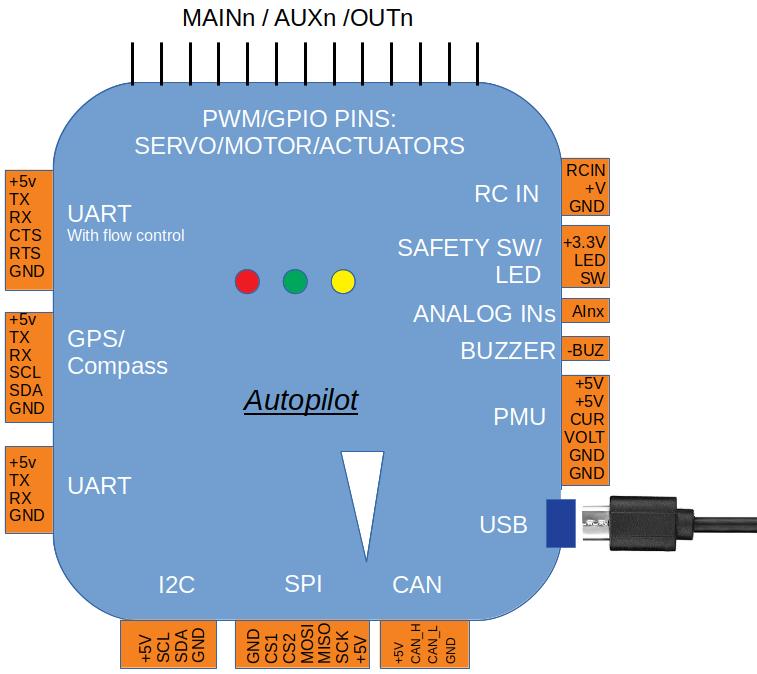
本主题涵盖(飞行)控制器基本/必备外围设备的布线/连接。有关每个(飞行)控制器端口/连接器的详细说明,请参阅 (飞行)控制器输入和输出
全球定位系统/指南针¶
GPS 通常是所有载具的必备功能,除非有其他定位功能。 使用的传感器或系统.Copter 和 Rover 以及 QuadPlane 平面类型通常也需要指南针(见 无罗盘操作 指南针替代品),但不适用常规飞机,不过建议使用。
备注
某些 Copter 和 Rover 模式可以在没有 GPS 和指南针的情况下运行(有关飞行模式,请参阅载具文档)。
系统中可使用多个 GPS 和/或指南针,请参见 GPS 混合(又称双 GPS), 高级指南针设置和 EKF3 耦合力和车道切换 更多信息
备注
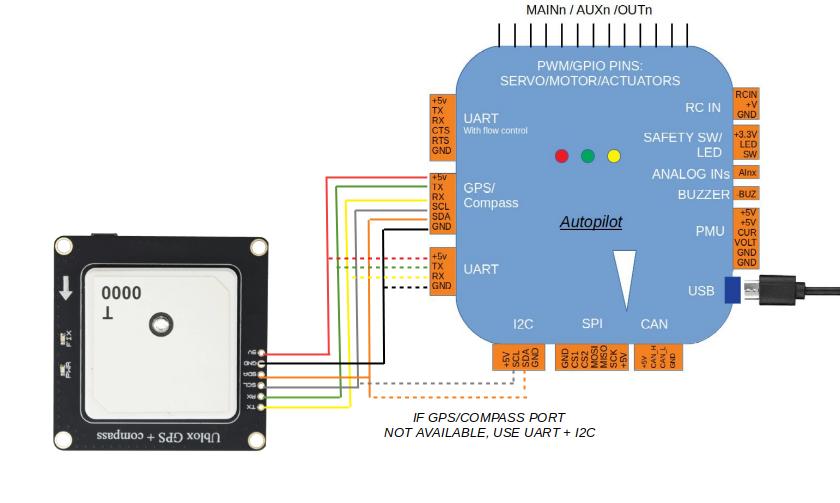
TX 和 RX 从(飞行)控制器切换到 GPS 模块。
备注
通常,GPS 默认连接到 ArduPilot 的逻辑串行端口 3。不过,(飞行)控制器上的 ArduPilot 串行端口 3 分配给哪个物理 UART,在(飞行)控制器的 文献资料
备注
重要的是,GPS 必须连接到第一个 SERIALx 端口,该端口有 SERIALx_PROTOCOL 参数设置为 "5"(GPS),因为如果在为 GPS 协议配置的第一个端口上未找到 GPS,它将在启动过程中停止搜索 GPS。
以接线为例 3DR UBlox GPS + 指南针模块 演示了如何连接 Pixhawk (飞行)控制器,还包括其他配置和安装信息。
RC 输入¶
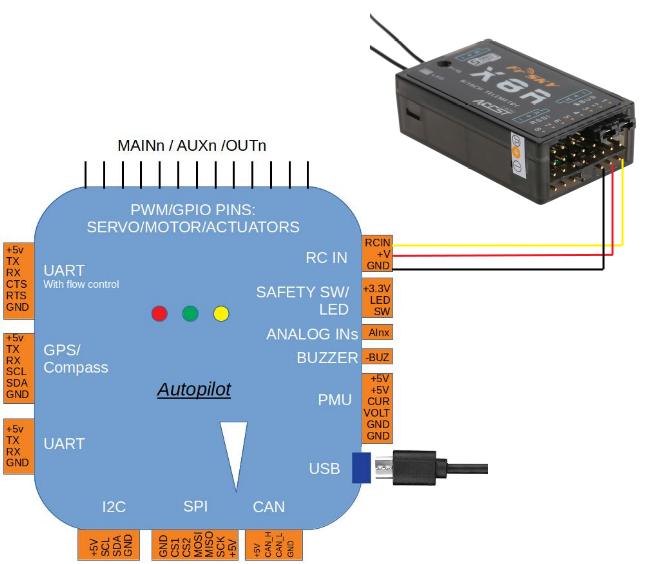
无线电控制接收器通常用于飞行员控制。虽然可以使用遥测技术通过地面站对飞行器进行独家控制,但不建议这样做。(不过,可以通过地面站软件使用操纵杆控制飞行器。参见 操纵杆.
ArduPilot 可自动检测以下串行遥控接收器协议:
PPM 遥控 (R/C) 接收器
SBus 接收器
FPort 接收器(见 FPort 接收器 )
交叉火力(CRSF)和 ELRS 接收器(见 穿越火线和 ELRS 遥控系统需要完整的 UART 连接)。
Spektrum DSM 和 DSM2 接收机
Spektrum DSM-X 卫星接收机
IBUS 接收器
MULTIPLEX SRXL 版本 1 和版本 2 接收器。
对于传统的单线每通道 (PWM) 接收器,可使用 PPM 编码器将接收器输出转换为 PPM。
提示
从 ArduPilot 4.0 版固件开始,任何(飞行)控制器 UART 都可用作遥控接收器的输入,而不是指定的 RCin 或 SBUS 输入引脚,方法是设置该端口的 SERIALx_PROTOCOL 但是,某些串行协议需要反相(SBUS、FPort),UART 必须能够使用反相(SBUS、FPort)。 SERIALx_OPTIONS 参数来反转 RX 输入,否则将需要外部反相器。这样还可以将第二个遥控接收器连接到(飞行)控制器上,以实现冗余。如果第一个接收器(启动后检测到的第一个有效接收器)出现故障,则将使用第二个接收器。请注意,当第二个接收器激活时,将使用已校准的遥控输入范围和微调。两个接收器都必须设置为在故障安全状态下不发送脉冲,这样才能正常工作。 RC_OPTIONS 第 10 位也必须设置。
提示
有关兼容接收器及其连接方式的信息,请参见 无线电控制系统.另请参见 多个无线电遥控接收器 用于使用多个遥控接收器

FRSky Taranis 发射器¶
电机/伺服器连接¶
电机电调和(或)PWM 伺服电机连接到(飞行)控制器的 PWM 输出端。
它们被标为 MAIN/AUX 输出或 OUTPUT 输出。这些输出为电机电调或飞行表面伺服控制提供 PWM 或 Dshot 信号。有时,它们也可用作通用 I/O 引脚,用于控制继电器、降落伞、机械爪/机械手臂等。
带有 MAIN/AUX 输出标签的控制器通常表示使用了 IOMCU 协处理器。这些输出可用作电机/伺服输出,并在主(飞行)控制器发生故障时通过遥控提供冗余控制。主输出来自该协处理器,而指定的辅助输出则由(飞行)控制器直接控制。大多数板级(飞行)控制器不使用 IOMCU,其输出仅标有 OUTPUTx 或 Mx。
这一区别非常重要,因为 AUX 输出(以及不带 IOMCU 的(飞行)控制器的 OUTPUT)既可用作 GPIO,也可用作 PWM 或 Dshot。而主输出只能用于 PWM。
备注
一些不使用 IOMCU 的(飞行)控制器将其输出标记为 MAIN,因此实际上可以用作 GPIO 和/或 Dshot ESC 控制输出。例如 CUAV V5 Nano 和 Holybro Pixhawk 4 Mini。
这些输出通常由 3 针连接器提供,除了单独的输出信号外,还提供或分配伺服电源和接地。这种电源通常由外部提供,例如由电调或 BEC 提供,但有些(飞行)控制器也通过内部稳压器提供这种电源。
路虎的连接示例
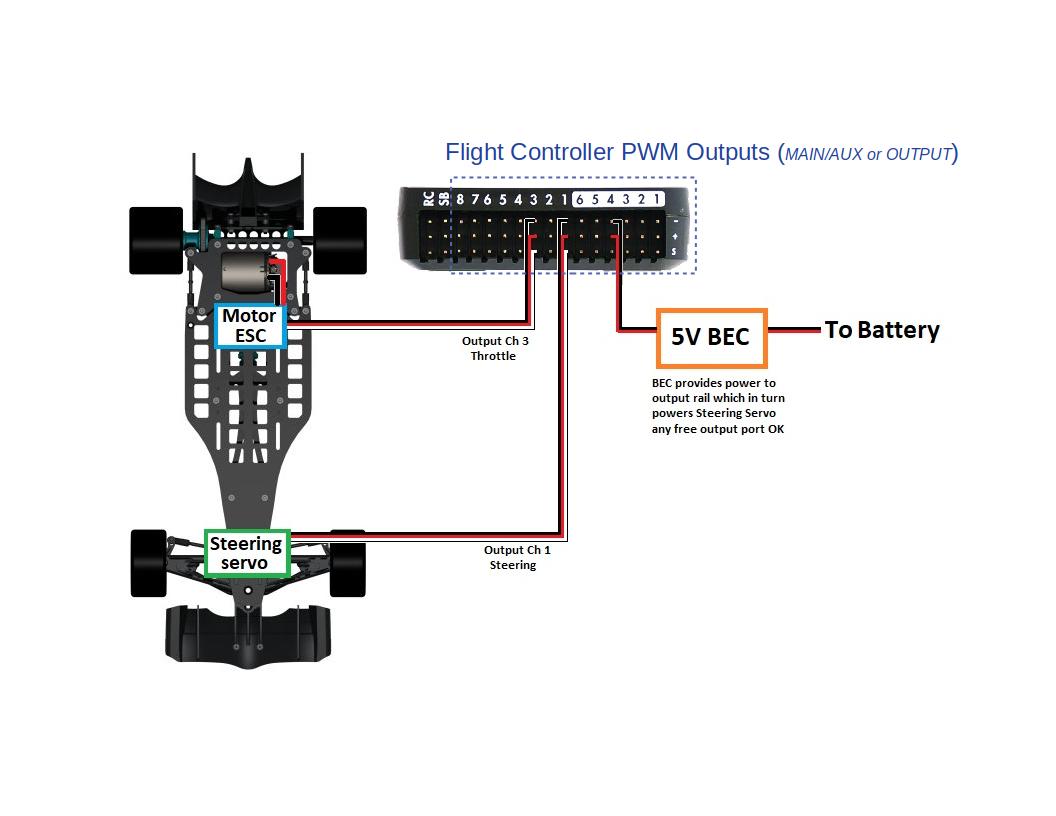
仅使用电机的旋翼飞行器示例。在这种情况下,只连接电调信号线。
对于路虎车,将油门和转向线连接到主输出信号引脚上。默认设置为
输出 3 = 节流器
输出 1 = 转向
滑移转向输出功能参数用于配置具有固定车轮并像坦克履带一样转向的载具(即不使用舵机转向车轮,而是使用左右车轮之间的差速)。用于每侧电机输出的 SERVOx_FUNCTION 参数可使用 节流阀/电门 左侧 和 节流阀/电门 对 输出功能。参见 UGV无人车运动功能
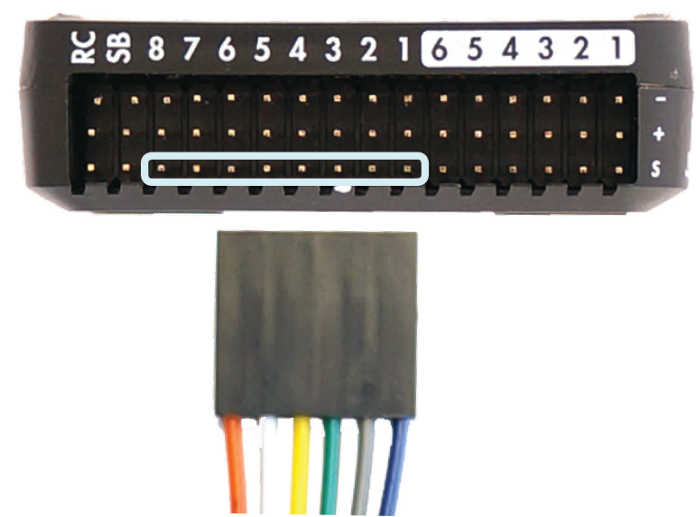
连接蜂鸣器和安全开关¶
蜂鸣器和安全开关按钮为可选项,但对某些配置非常有用。并非所有(飞行)控制器都提供这些连接。如图所示,蜂鸣器和开关可分别连接到各自的端口。
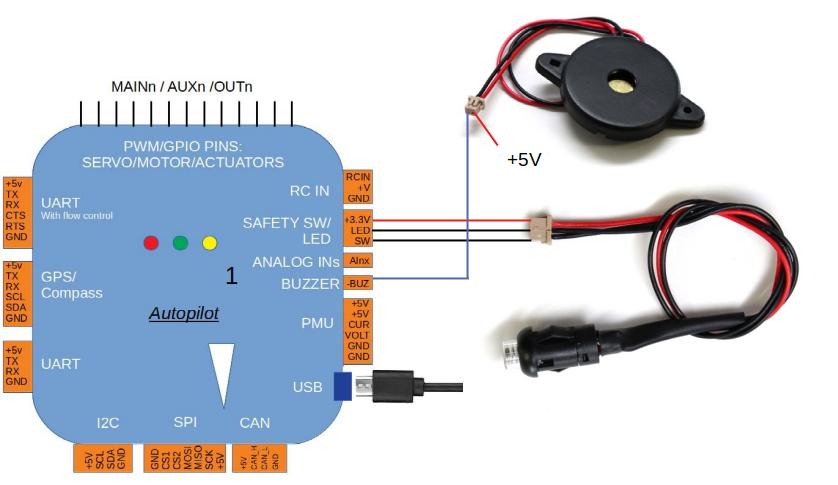
警告
将蜂鸣器安装在距离飞行控制器至少 5 厘米远的地方,否则噪音可能会干扰加速度计。
连接其他外设¶
根据硬件的不同,还可能连接其他外围设备,包括传感器、摄像头、机械手等。这些外围设备可以在主题的子页面中找到 可选硬件.
有关将这些外围设备连接到(飞行)控制器的信息,请参阅相关页面。