EKF3 耦合力和车道切换¶
"这款" EKF 实例化了多个称为 "车道 "的过滤器实例。主通道是提供状态估计的通道,其余通道在后台更新,并可供切换。可能的车道数量与启用的 IMU 数量完全相等。常规情况下,每个车道使用空速、气压计、GPS 和磁力计传感器的主要实例。主传感器可设置为用户可修改的参数,但在驾驶员出现故障的情况下,系统也可随后更改,甚至在飞行过程中更改。不过,众所周知,现代载具安装了多个质量上乘的传感器。耦合性是 EKF 车道在任何运行车道内使用非主要传感器的一种方法。这提供了一种统计上一致的方法来使用多个高质量传感器,并使用车道切换来选择传感器组合性能最佳的车道。车道误差分数考虑了车道使用的所有传感器的创新。这样,载具就可以避免使用噪声大的非 IMU 传感器时发生事故。
一个简单的耦合配置示例,说明载具上有 1 个气压计、2 个全球定位系统、2 个空气速度计、3 个磁力计和 3 个 IMU。
| LANE | 1 | 2 | 3 |
|---|---|---|---|
| 空气动力 | 1 | 2 | 1 |
| 气压计 | 1 | 1 | 1 |
| 全球定位系统 | 1 | 2 | 1 |
| 磁力计 | 1 | 2 | 3 |
数字是各自的传感器实例
配置参数¶
备注
耦合力仅适用于 EKF3,因此请确保您正在使用它,确保 EK3_ENABLE 设置为 "1",并且 AHRS_EKF_TYPE 设置为 "3"
"这款" EK3_AFFINITY 参数是一个位掩码,用于选择要启用耦合力的传感器。未启用的将遵循默认的主传感器分配。
"这款" EK3_ERR_THRESH 参数控制车道切换的灵敏度。车道误差是相对于活动主车道随时间累积的。此阈值控制非主要车道和主要车道之间需要多大的误差差值才能认为前者的性能更好。降低该参数可使车道切换对较小的 "相对 "误差反应更灵敏,在实际操作中,您将看到更积极的车道切换,反之亦然。
警告
错误配置 EK3_ERR_THRESH 该参数可能会对车道切换机制产生不利影响,并造成严重后果,可能导致载具损失。请谨慎调整。
测试结果¶
以下图表来自 SITL 测试,显示了当主车道传感器受到噪音/故障影响时,启用了耦合功能的车道变更。
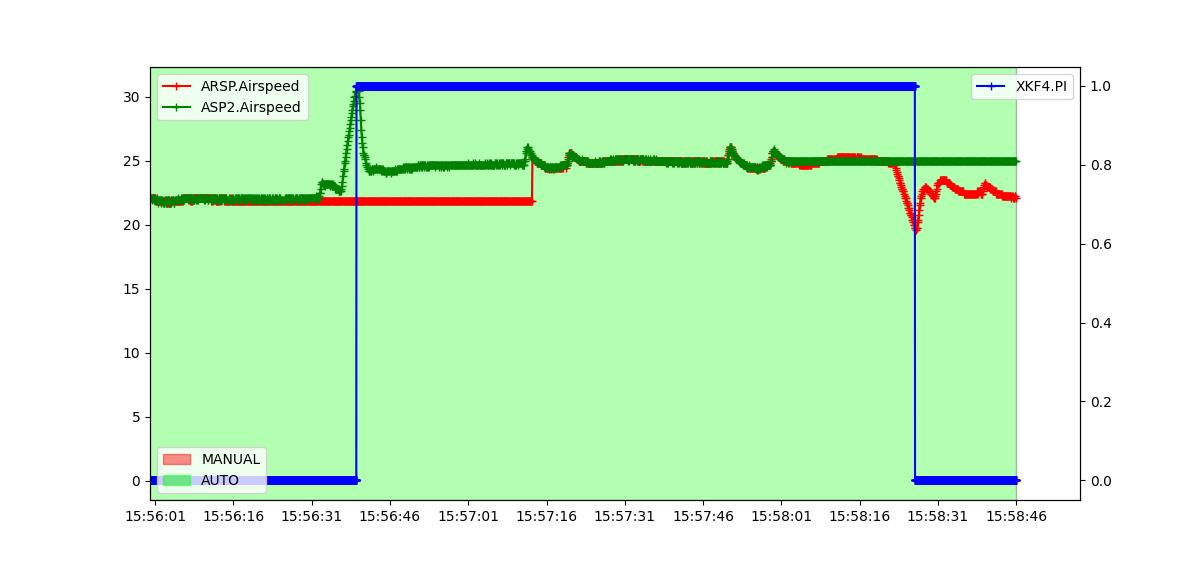
空气动力¶
带有 2 个空速传感器并启用了空速耦合功能的飞机的航道切换示例。有 2 个 IMU,因此有 2 个活动航道。主通道的空速传感器无法显示压力变化,因此报告的是一个恒定值。飞机速度增加后,就会发生车道切换。同样,第二车道(现为主车道)的第二个空速传感器失效,飞机速度降低,再次触发车道切换。
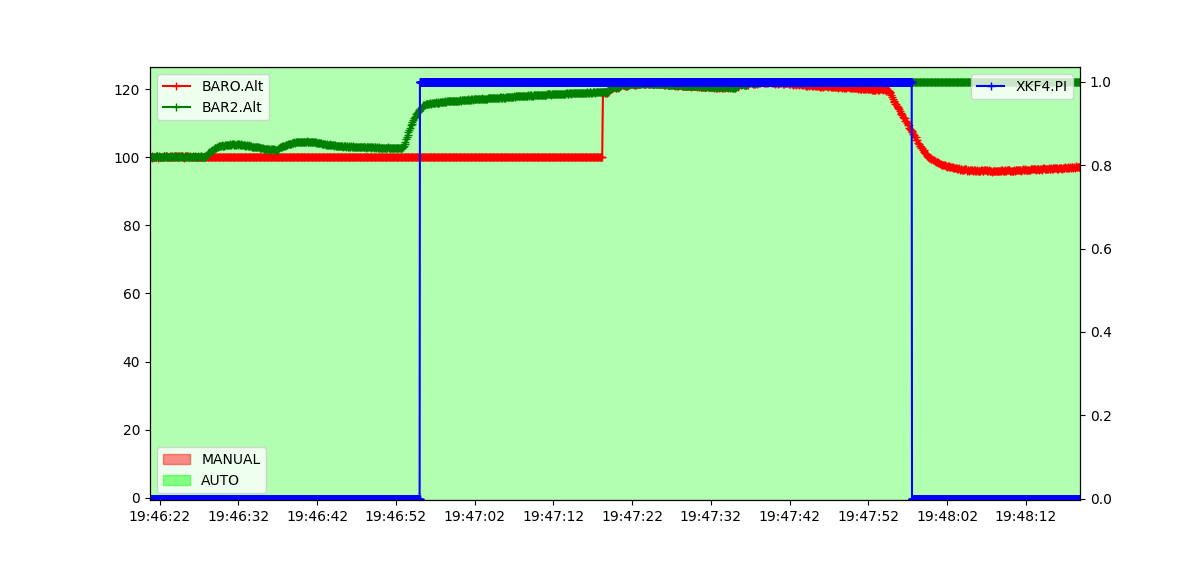
气压计¶
使用 2 个气压计并启用气压计耦合性的飞机进行航道切换的示例。有 2 个 IMU,因此有 2 个活动航道。主通道的气压计无法显示压力变化,因此报告的是一个恒定值。飞机的高度增加后,就会发生车道切换。同样,第二条车道(现为主车道)的第二个气压计也出现故障,飞机高度降低,再次触发车道切换。
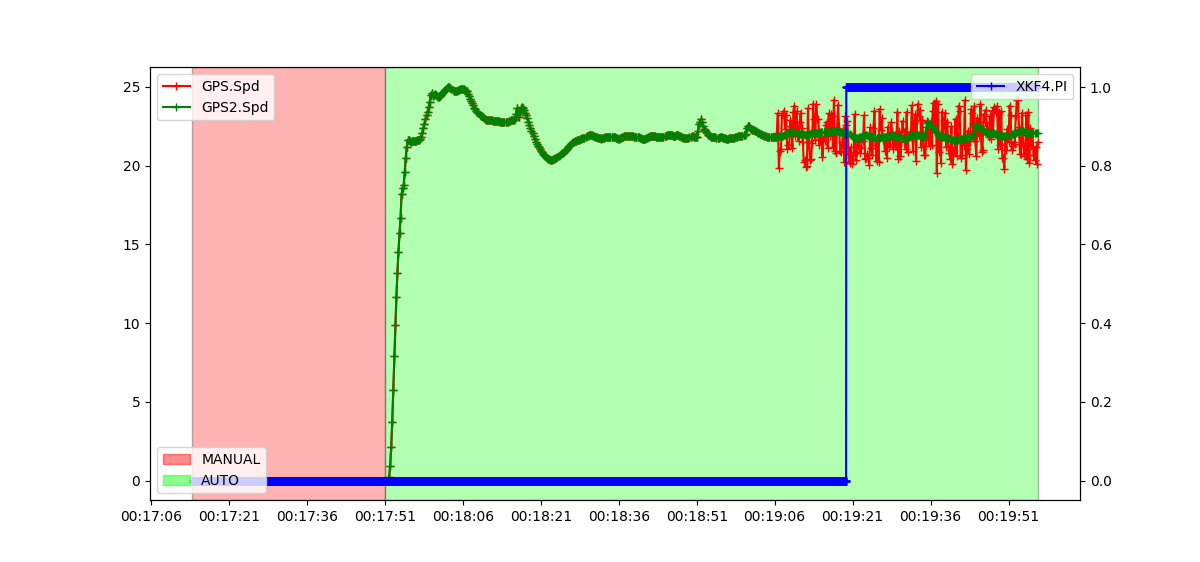
全球定位系统¶
启用了 2 个 GPS 和 GPS 耦合功能的飞机的车道切换示例。有 2 个 IMU,因此有 2 条有效车道。主车道的 GPS 采用随机 GPS 速度噪声进行模拟,所有 3 轴的噪声范围为 ±2m。实际速度可通过第二个 GPS 跟踪。随后,EKF 主车道开始报告持续偏高的误差,当误差超过设定阈值时,车道将发生切换。
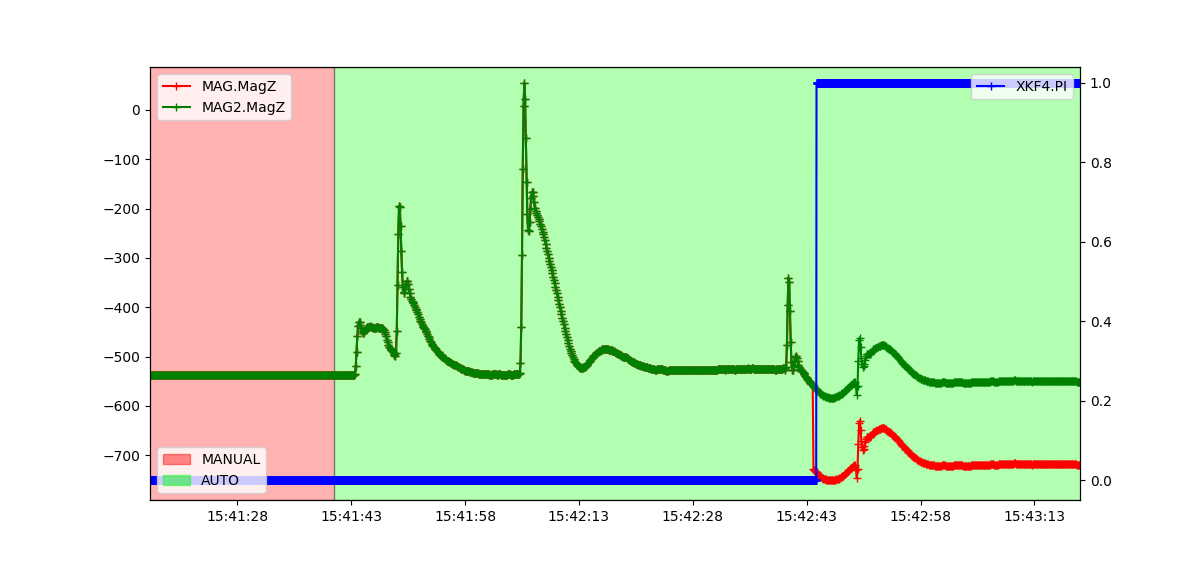
磁力计¶
使用 2 个磁强计并启用磁强计耦合性的飞机的车道切换示例。有 2 个 IMU,因此有 2 条有效车道。在飞行过程中,通过改变 Z 轴的偏移量来模拟主通道磁力计的误差。偏移量的变化可通过第 2 个磁力计跟踪。随后,EKF 主通道开始报告持续的高误差,当误差超过设定阈值时,就会发生通道切换。