引导模式¶
制导模式旨在让地面站或 配套计算机 来控制载具。
从地面站发送命令¶
大多数地面站都支持通过点击地图指挥飞行器驶向指定位置。如果使用Mission Planner地面站:
用 遥测无线电
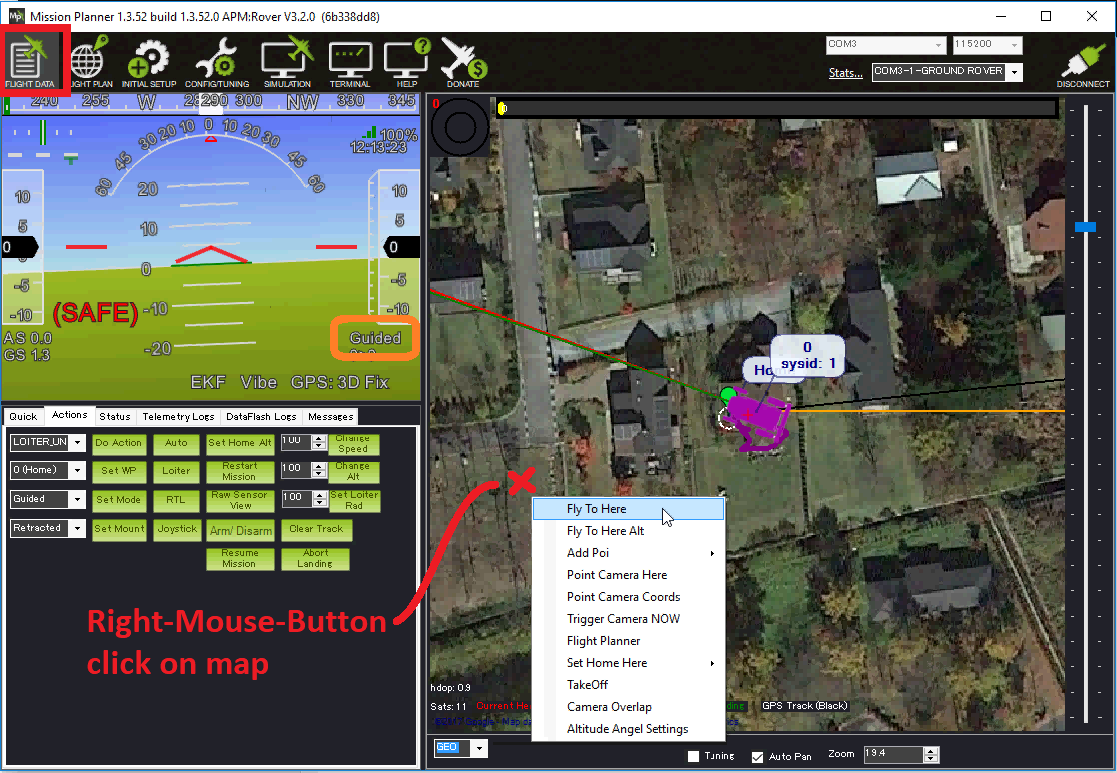
从 "飞行数据 "屏幕,用鼠标右键点击地图,选择 "飞往此处"。
载具将切换到 "向导 "模式,并尝试驶向指定位置。
一旦到达目的地,如果是水面载具,它将保持位置不动;如果是船只,它将在目的地周围徘徊/盘旋。
地面站通常会在发送目标目的地之前将飞行器设置为制导模式,这意味着无需在飞行器上设置制导模式。 发射机模式开关.
速度¶
在载具行驶过程中,用户可以通过将发射器的油门杆提升至 75% 至 100% 之间来提高车速。在 75% 时,飞行器将保持配置速度(即 WP_SPEED 或 巡航 如果 WP_SPEED 为零,3.5.1 之后的 Rover 版本仅使用 WP_SPEED),当驾驶员的油门杆达到 100%时,速度会线性增加到载具的最大速度。
其他控制¶
这些附加的 MAVLink 信息在制导模式下受支持。列出这些信息主要是为了地面站开发人员或 配套计算机 应用:
mav_cmd_nav_set_yaw_speed 航速设置命令中的 命令长