位置悬停模式¶
停泊模式允许船只在强水流中保持位置。
这种模式的工作方式是
用户切换到 "闲置 "模式,利用载具的当前位置、速度和最大减速度来预测合理的停车点
当船在 LOIT_RADIUS 它只是漂移
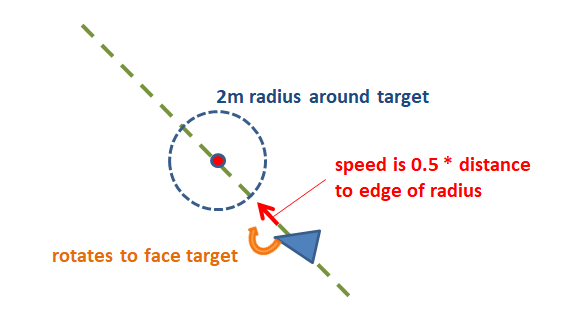
如果/当船偏离超过 LOIT_RADIUS 目标:
旋转到直接指向目标或直接远离目标(以旋转幅度较小者为准)。
以 0.5 米/秒 * 到目标周围圆圈边缘的距离向前或向后驱动/漂浮,但速度不超过 WP_SPEED.
提示
为了获得最佳性能,电调死区应该很小。电调死区 MOT_THR_MIN 可用于补偿电调死区。参见 部分 了解详情。