跟随模式¶
切换到 "跟随 "模式后,载具将尝试以指定偏移量跟随另一辆车(或任何发布其位置的物体)。领头载具的位置必须通过遥测系统发布给处于跟随模式的载具,如下图所示。用于安卓手机和电脑的 QGroundControl 应用程序 (QGC) 也在测试中,因此它将跟随地面控制站,而不是载具,类似于 Copter 中的 "跟随我 "模式。
最简单的形式是,每辆车的一个遥测端口上都有一个具有相同 NETID 的遥测无线电。
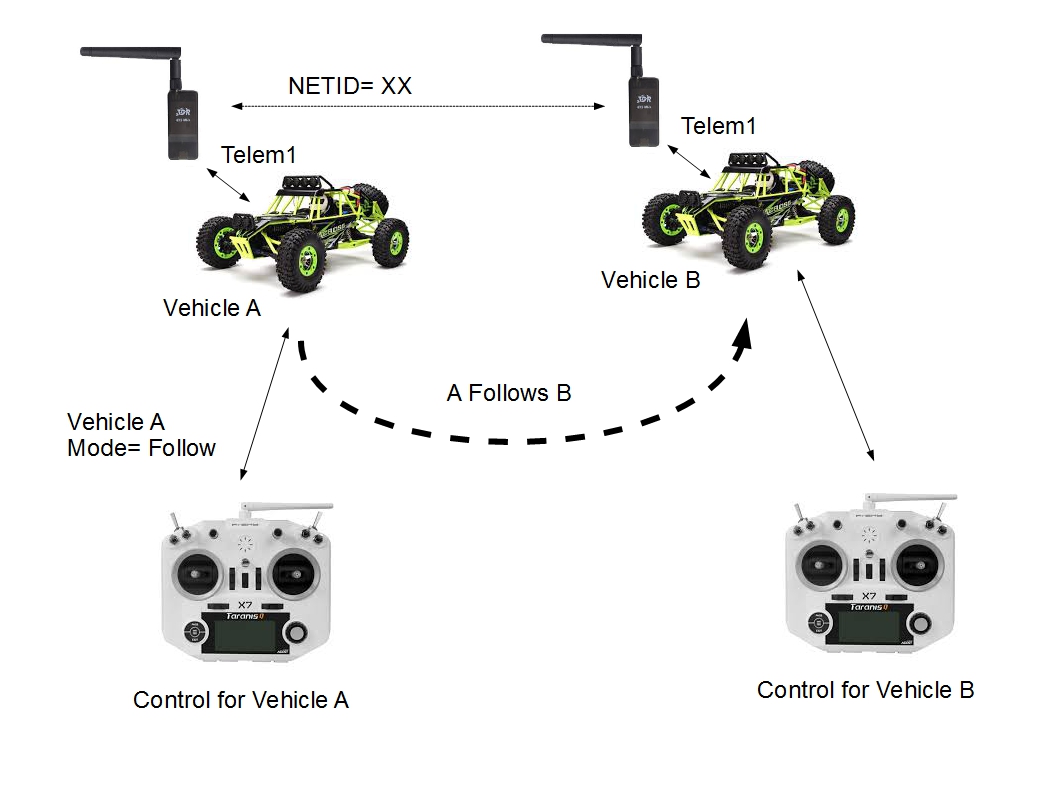
载具 A 只需进入 "跟随 "模式,就会尝试跟随载具 B,反之亦然。
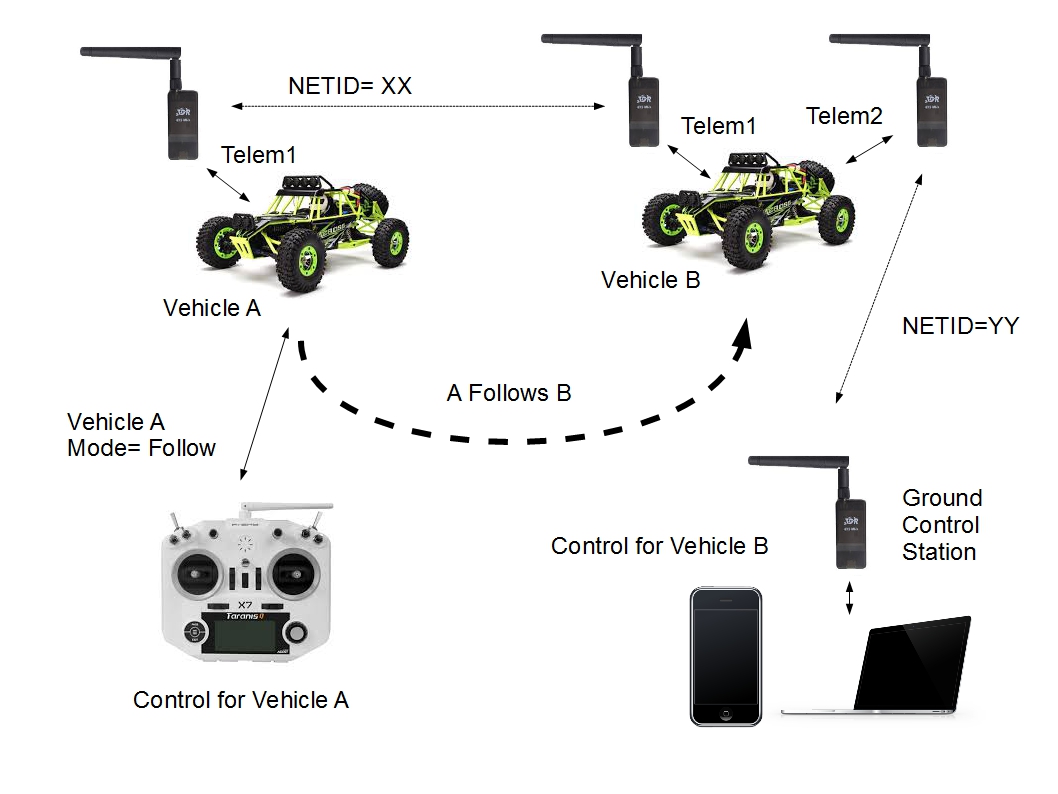
如果载具 A 或 B 需要地面站控制,可在载具控制器的另一个遥测端口上安装不同 NETID (YY) 的额外遥测无线电,并与同一 NETID 上的地面站控制无线电配对。
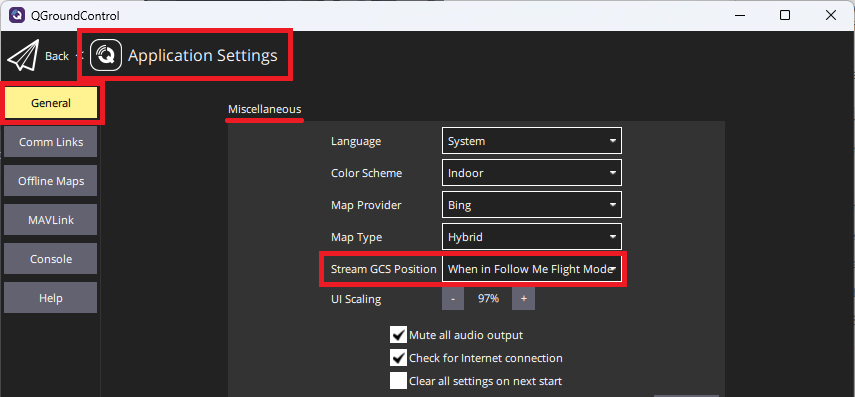
如果使用 QGroundControl,请确保 "常规 "选项卡下的 "应用程序 "设置 流 GCS 职位 设置为 "当处于'跟我飞行'模式时 "或 "始终"。然后连接到载具并切换到 "跟随 "模式,它就会跟随运行 QGC 的电脑/手机。
以下参数可用于调整 "跟随 "模式的性能:
FOLL_ENABLE:设置为 1 时,启用跟踪模式并刷新参数。
FOLL_SYSID:引导载具的 MAVLink 系统 ID("0 "表示跟随第一辆 "看到 "的载具)。
FOLL_DIST_MAX注意:如果前导车距离超过这个米数,则放弃跟踪并保持位置(如果是船,则位置悬停;如果是地面载具,则停止)。
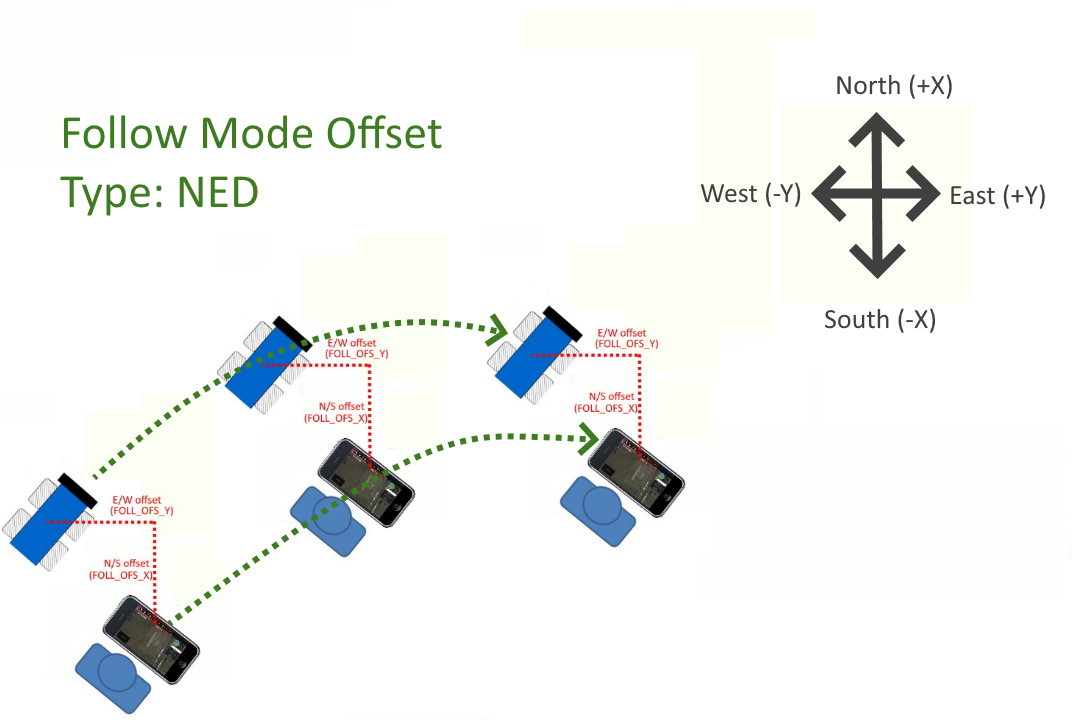
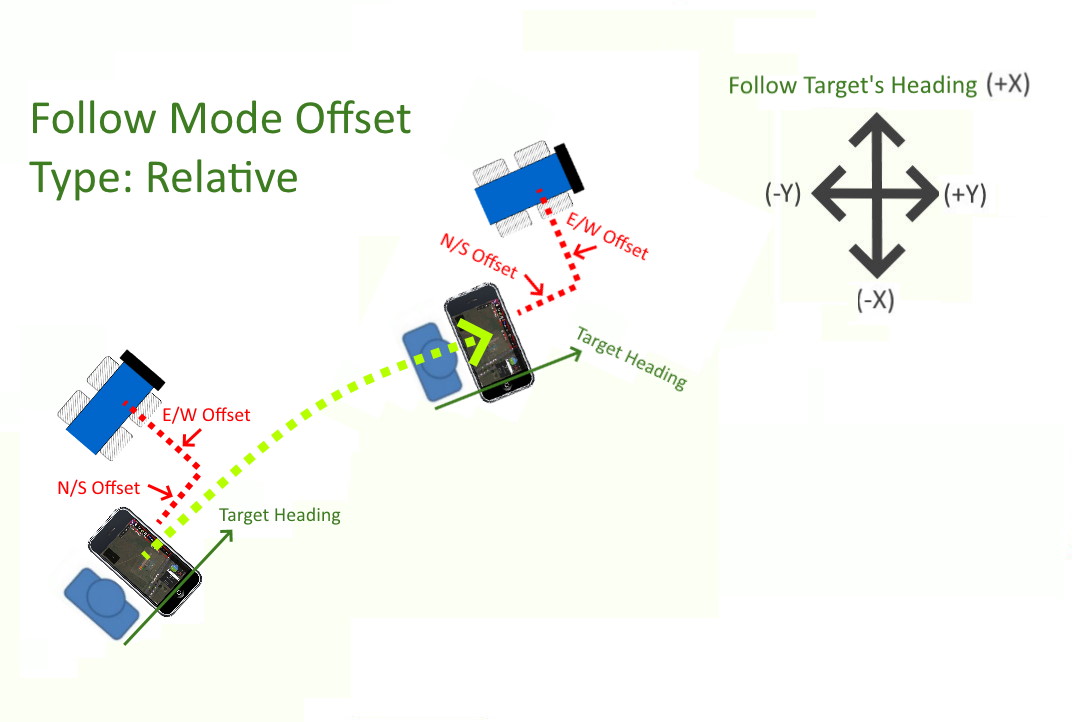
FOLL_OFS_X, FOLL_OFS_Y, FOLL_OFS_Z (不用于漫游车):与前导载具的 3D 偏移量(以米为单位)。如果为零,则每次都使用当前飞行器在进入模式时与跟随目标的偏移量。可以通过 Mavlink 更改这些偏移量,并立即生效。但是,如果这些偏移量原本为零,并且是在 "跟随 "模式下而不是在其他模式下更改的,那么在下一次进入 "跟随 "模式时,这些偏移量将被重置为零,直到重新启动后才会恢复更改后的偏移量。
FOLL_OFS_TYPE如果偏移量是东北偏移量(NED),则设置为 0;如果偏移量是相对于引导车的航向,则设置为 1,见下图。
FOLL_POS_P增益:增益可控制本车向前方载具移动的速度(受限于 WPNAV_SPEED)