简单模式¶
简单模式允许飞行员从自己的视角控制飞行器的移动,无论飞行器当前朝向何方。这对于尚未掌握根据载具朝向调整转向输入的新飞行员,以及载具距离较远、方向不明显的情况非常有用。
简单模式允许您根据上膛时的载具航向控制载具,并且只依赖于良好的罗盘航向。
手动/自动调节模式¶
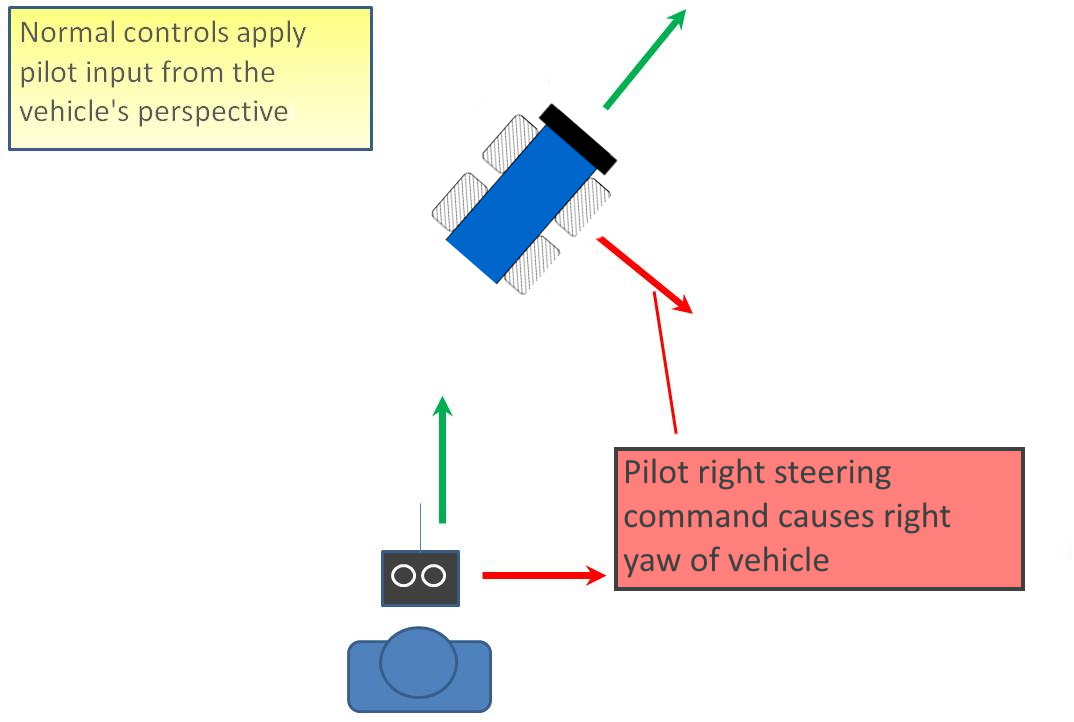
在 "手动 "或 "Acro "模式下,飞行员的发射机摇杆输入将按照飞行器的方向进行。例如,在上图中,当飞行员向右偏航(红色)时,只要不释放摇杆输入,飞行器就会向右偏航。
当飞行器朝向与驾驶员相同的方向时,控制飞行器相对容易,但当飞行器朝向驾驶员时,缺乏经验的驾驶员会感觉控制方向完全颠倒。例如,如果飞行员向右偏航,从飞行员的角度看,载具会向左转向。
简单模式¶
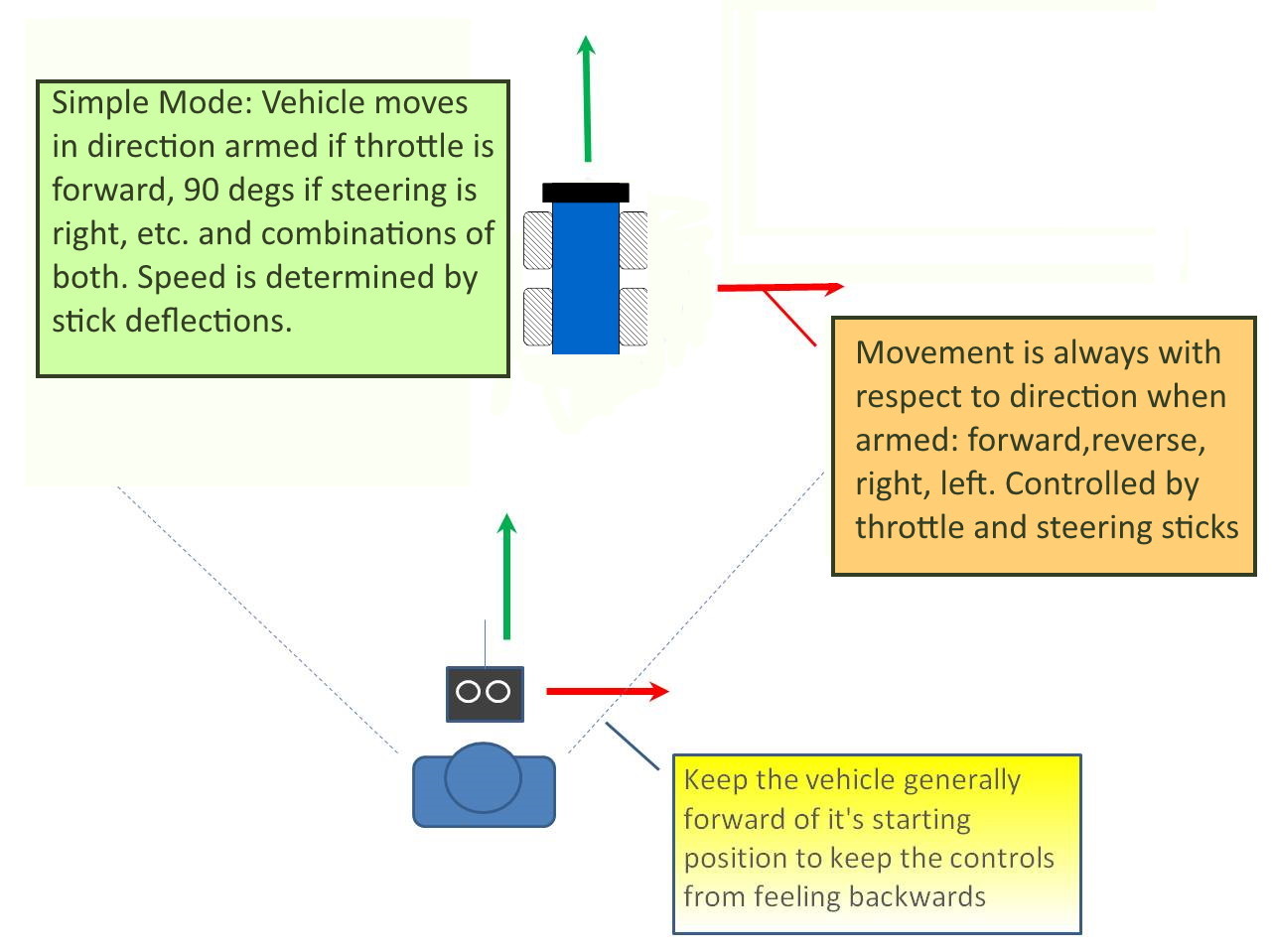
通过该模式,您可以驾驶飞行器,就好像飞行器指向了上膛时的方向,而不受当前航向的影响。因此,如果您向前握住油门杆,载具就会远离您(向上膛时的方向),向后拉油门杆,载具就会掉头向您驶来,方向与上膛时相反。同样,如果您握住方向杆向右转,油门处于空档,载具会转向与上膛时呈 90 度的方向,并向该方向行驶。
载具移动的速度与油门和/或转向杆偏离空档的位置成正比,与 "弧线 "模式类似,空档为停止,全速为最大速度("弧线 "模式)。最大速度).当油门杆全速向前时,载具将尝试在上膛方向上以最大速度行驶,当速度为 75% 时,速度目标将是最大速度的 1/2,当速度为 25% 时,速度目标将是上膛方向相反方向上最大速度的 1/2。同样,对于转向杆来说,右满舵是 90 度时的最大速度,左满舵是与上膛方向成 -90 度时的最大速度。速度目标受限于最大速度,因此全速向前油门和全速向右转向不会导致在 45 度时速度超过最大速度,而是受限于最大速度。
一般来说,在上膛时,您应该站在载具后面,让车头直接指向远离您的位置。在移动时,应尽量使载具保持在起始位置的前方,因为如果载具移动到您的后面,所有的控制都会感觉反转。
如上所述,简单模式在紧急情况下也非常有用,因为在这种情况下,载具距离很远,很难确定其航向。
"这款" SIMPLE_TYPE 参数允许移动方向基于绝对的北/南/东/西罗盘方向,而不是相对于上膛方向。