飞行稳定调整导航¶
本页介绍如何调整导航控制器,包括 "S 曲线 "和 "位置控制器"。下层 速度 和 周转率 在尝试调整本控制器之前,应先调整控制器。
S 曲线和位置控制器用于所有自主模式,包括 载具, 指导, RTL 和 SmartRTL.
S 曲线¶
S 曲线用于规划一条平滑的路径,使飞行器在不超过速度或加速度限制的情况下接近每个航点。由此产生的路径包括连续的位置和二维速度目标。
影响路径的因素包括
载具会拐弯,但始终会尝试在每个航点的 WP_RADIUS 或 TURN_RADIUS 范围内(以较大者为准)通过
载具在高速行驶时更容易转弯
如果减小最大加速度(例如 ATC_ACCEL_MAX、ATC_DECEL_MAX 和 TURN_MAX_G * 9.81 中的最小值),载具会更多地转弯。
必要时,载具会在弯道减速,以便在不超过最大加速度(例如 ATC_ACCEL_MAX、ATC_DECEL_MAX 和 TURN_MAX_G * 9.81 的最小值)的情况下通过 WP_RADIUS 范围内的航点。
将航点放置在一起可能会导致载具行驶缓慢
职位控制员¶
位置控制器负责计算所需的速度和转弯率,以便载具沿着 S 型曲线(见上文)创建的航点之间的路径行驶。然后将所需的速度和转弯率传递给下级控制器。
调整位置控制器的方法
使用遥测无线电将地面站与飞行器连接起来
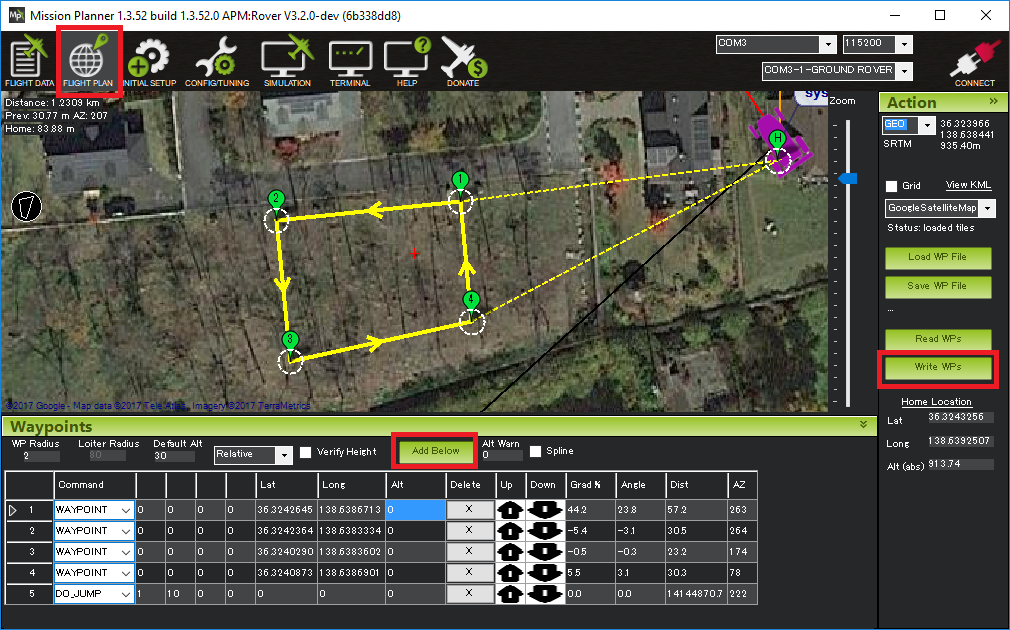
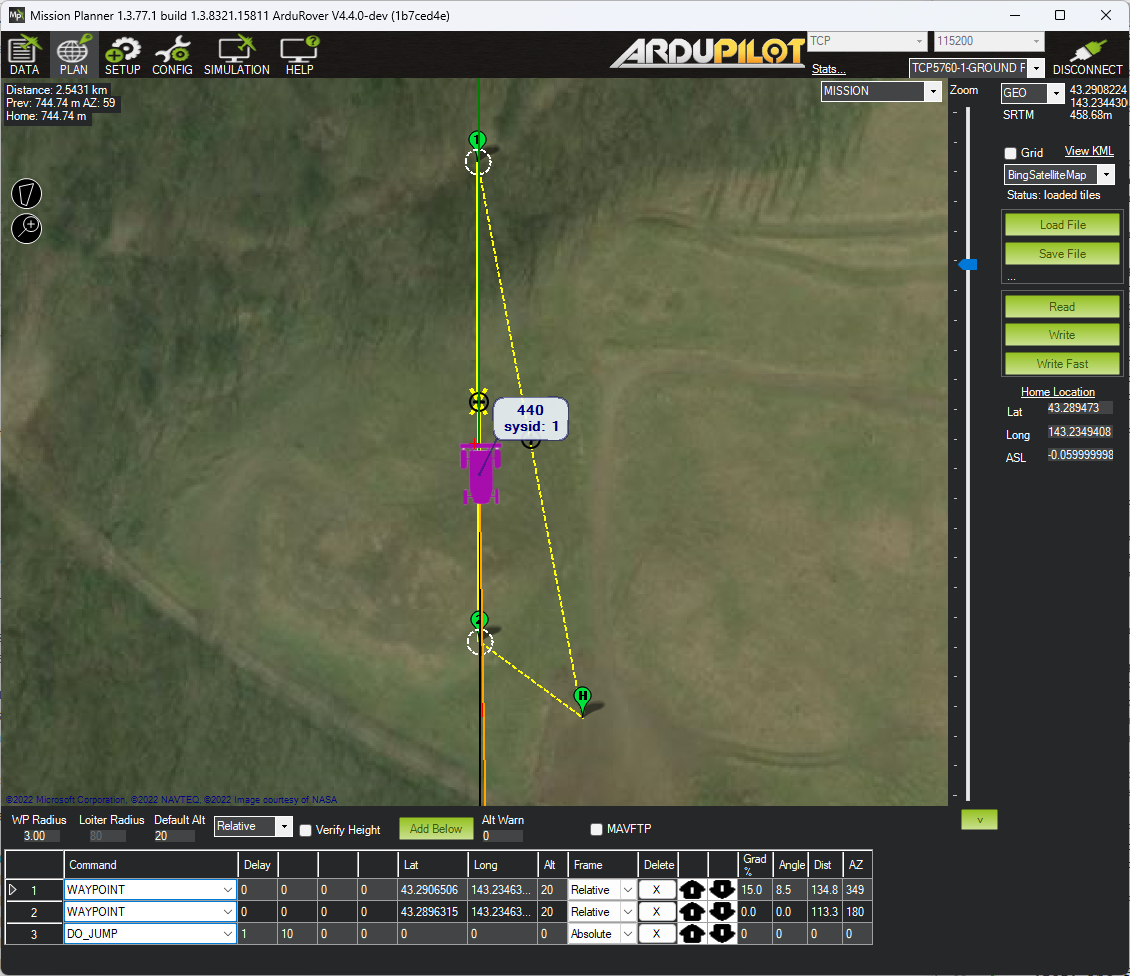
创建带有长直线段的矩形或前后飞行任务,并上传到飞行器上
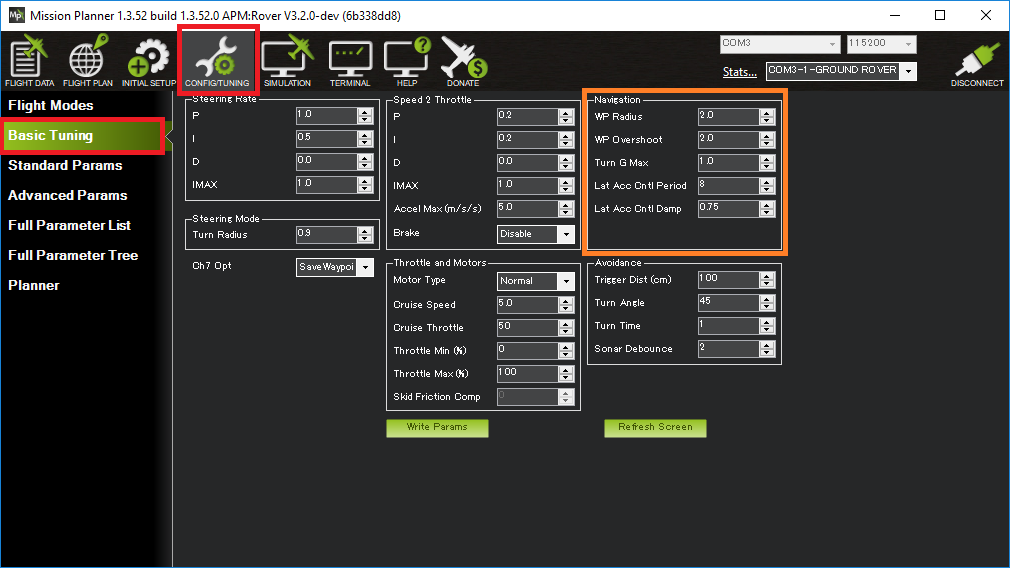
调整这些参数以改善载具的沿线跟踪性能
这些值通常无需更改
PSC_POS_P 应保持为 0.2(默认值)。这将位置误差转换为预期速度。数值越大,载具越想快速驶回直线,但如果调得太高,可能会导致摆动。
PSC_VEL_FF 应始终为 0
PSC_VEL_IMAX 应始终为 1
PSC_VEL_FLTD, PSC_VEL_FLTE 默认值应为 5,但小型载具可能会受益于更高的值
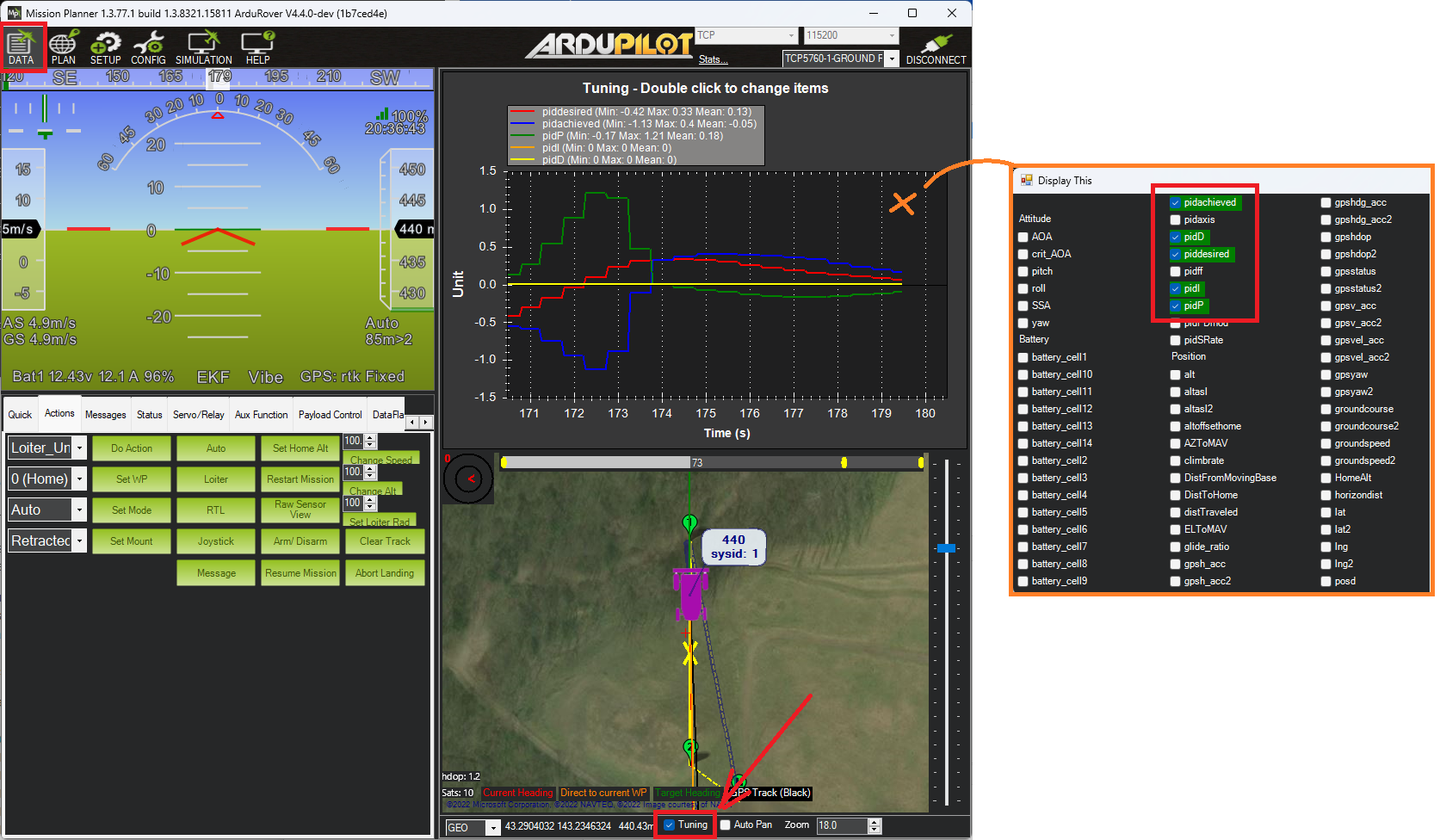
它还有助于实时监控速度控制器的 PID
确保飞行任务有南北或东西走向的长直线段
启用位置控制器速度控制器的实时 PID 报告功能
如果飞行任务由西向东运行,则设置 GCS_PID_MASK = 64(速度为北)。
如果飞行任务由北向南运行,则设置 GCS_PID_MASK = 128(速度向东)。
在地面站上显示实时 PID 值。如果使用 MP,请进入 "数据 "屏幕,选中 "调整 "复选框。双击显示区域,选择 "piddesired"、"pidachieved"、"pidP"、"pidI "和 "pidD"。
其他参数¶
位置控制器的工作原理¶
比较载具的当前位置和理想位置,计算理想的 2D 速度,以缩小差距
将载具当前速度与上述速度(又称位置修正速度)+ S 曲线提供的速度进行比较,并计算出所需的 2D 加速度,以减少误差
位置修正速度 + S 曲线速度的载具前进后退部分即为目标前进速度
二维加速度的横向分量成为目标转弯率