飞行稳定调整导航¶
本页介绍如何调整导航控制,包括 "L1 控制器"。下层 速度 和 周转率 在尝试调整本控制器之前,应先调整控制器。
L1 控制器¶
L1 一级控制器是最高级别的转向控制器。它接受位置目标(即经纬度点)和载具当前速度,并输出所需的横向加速度,然后将该加速度输入较低级别的控制器(包括转向率控制器)。这样,载具就会沿着一条线向目标行驶。该控制器用于所有自主模式,包括 载具, 指导, RTL 和 SmartRTL.
调整 L1 控制器的建议步骤:
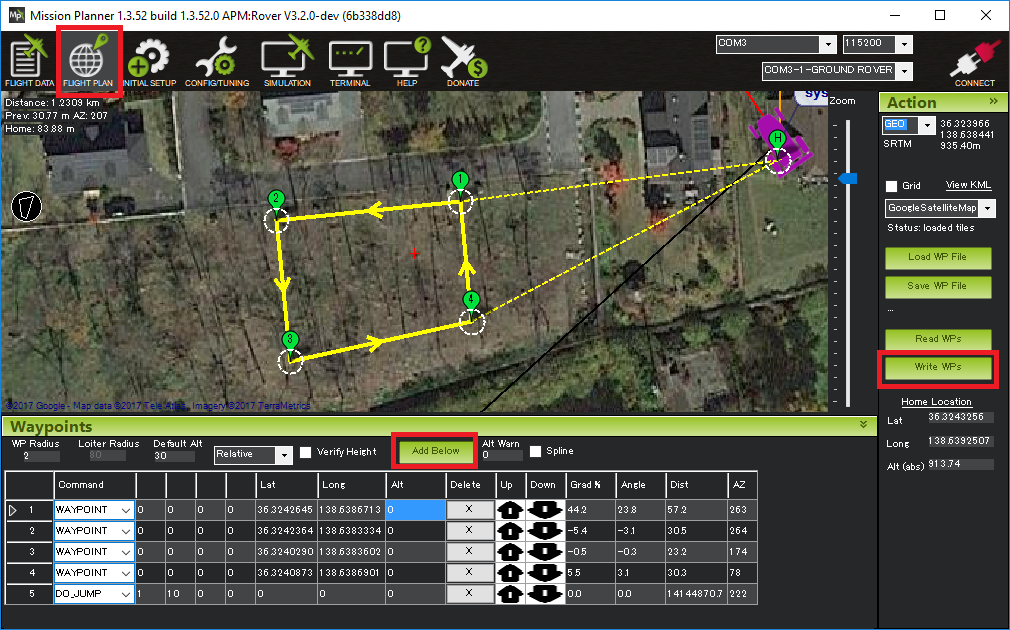
使用遥测无线电将地面站与飞行器连接起来
创建矩形或往返飞行任务(可使用Mission Planner地面站的飞行计划屏幕)并上传到飞行器上
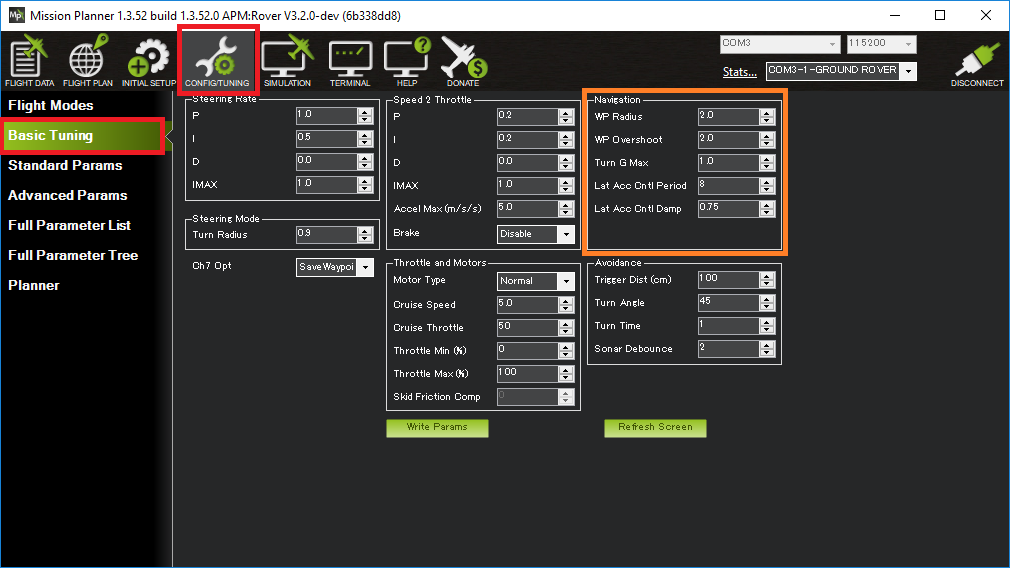
如果漫游车在直道上穿梭,那么提高 NAVL1_PERIOD (又称 "纬度累加周期"),增量为 0.5
如果漫游车转弯不够急,则应降低车速。 NAVL1_PERIOD (又称 "纬度累加周期"),增量为 0.5
提高 NAVL1_DAMPING (又名 "Lat Acc Cntrl Damp"),增量为 0.05,以改善在狭窄赛道中的导航性能
其他参数¶
ATC_TURN_MAX_G 定义控制器在转弯时尝试的最大横向加速度(单位 Gs = 9.81m/s/s)。大多数载具无法达到 0.3G 以上。为了更精确地测量载具可能达到的最大横向加速度:
在Mission Planner地面站的 "飞行数据 "屏幕上,选中 "调整 "复选框(底部中间),双击图表并选择 "ay"(加速度 Y 轴)。
以手动模式高速行驶载具并急转弯
设置 ATC_TURN_MAX_G 略低于最高值。请注意,显示的数值单位可能是 cm/s/s,因此该值应除以 981,以便与参数相匹配。
WP_SPEED 定义了载具在行驶过程中的目标速度(单位:米/秒)。 载具 和 指导.它还将用于 RTL 和 SmartRTL 如果 RTL_SPEED 设为零
WP_RADIUS 指定载具开始转向下一个航点的航点前距离。该参数不应设置过低,否则载具在非常接近航点时可能会尝试无益的转弯。
WP_OVERSHOOT用于在载具偏离起点和终点之间的直线过远时减速。如果设置过低,载具可能会经常减速,因为其位置会偏离航点之间的直线。如果设置过高,载具在转弯时可能不会减速。转轴角度 仅用于滑行转向载具。如果载具的航向误差大于该值(单位:度),载具将暂时停止并转向目标,然后再继续行驶。参见 调整枢轴转角 了解更多详情。