飞行稳定调整转弯率¶
本页介绍如何调整路虎的转弯率控制器(又称转向率控制器)。这是实现良好转向控制最重要的控制器。
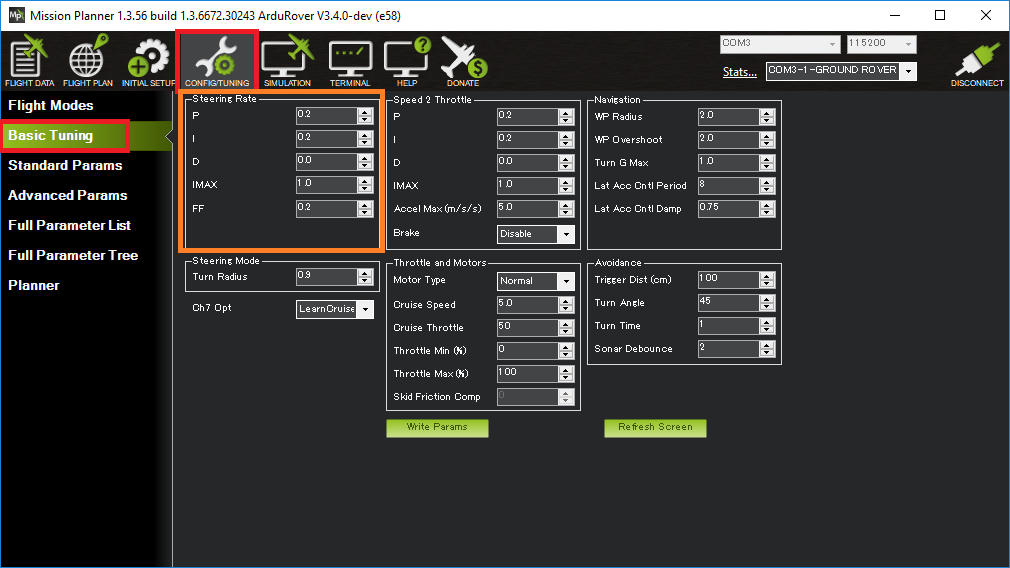
转差率 PID 调节¶
转弯率控制器尝试使用 PID 控制器实现所需的转弯率(由飞行员或(飞行)控制器设置)。所有模式除 保持 和 手册 使用该控制器。
该控制器的 FF、P、I 和 D 增益保存在 ATC_STR_RAT_FF, ATC_STR_RAT_P, ATC_STR_RAT_I 和 ATC_STR_RAT_D 参数。
调整该控制器的建议步骤如下:
使用遥测无线电将地面站与飞行器连接起来
设置 ACRO_TURN_RATE 参数大致为载具的最大转弯速率(度/秒)。要获得更精确的测量值
在Mission Planner地面站的飞行数据屏幕上,选中 "调整 "复选框(底部中间),双击图表并选择 "gz"(陀螺仪 Z 轴)。
以手动模式中速驾驶载具,急转弯
设置 ACRO_TURN_RATE 比最高值低一些。请注意,显示的值可能是厘度/秒,因此其值应除以 100 以匹配参数的度/秒。
设置 GCS_PID_MASK 至 1 (转向)
在Mission Planner地面站的 "飞行数据 "屏幕上,选中 "调整 "复选框(底部中间),双击图表并选择 "pidachieved"、"piddesired"。
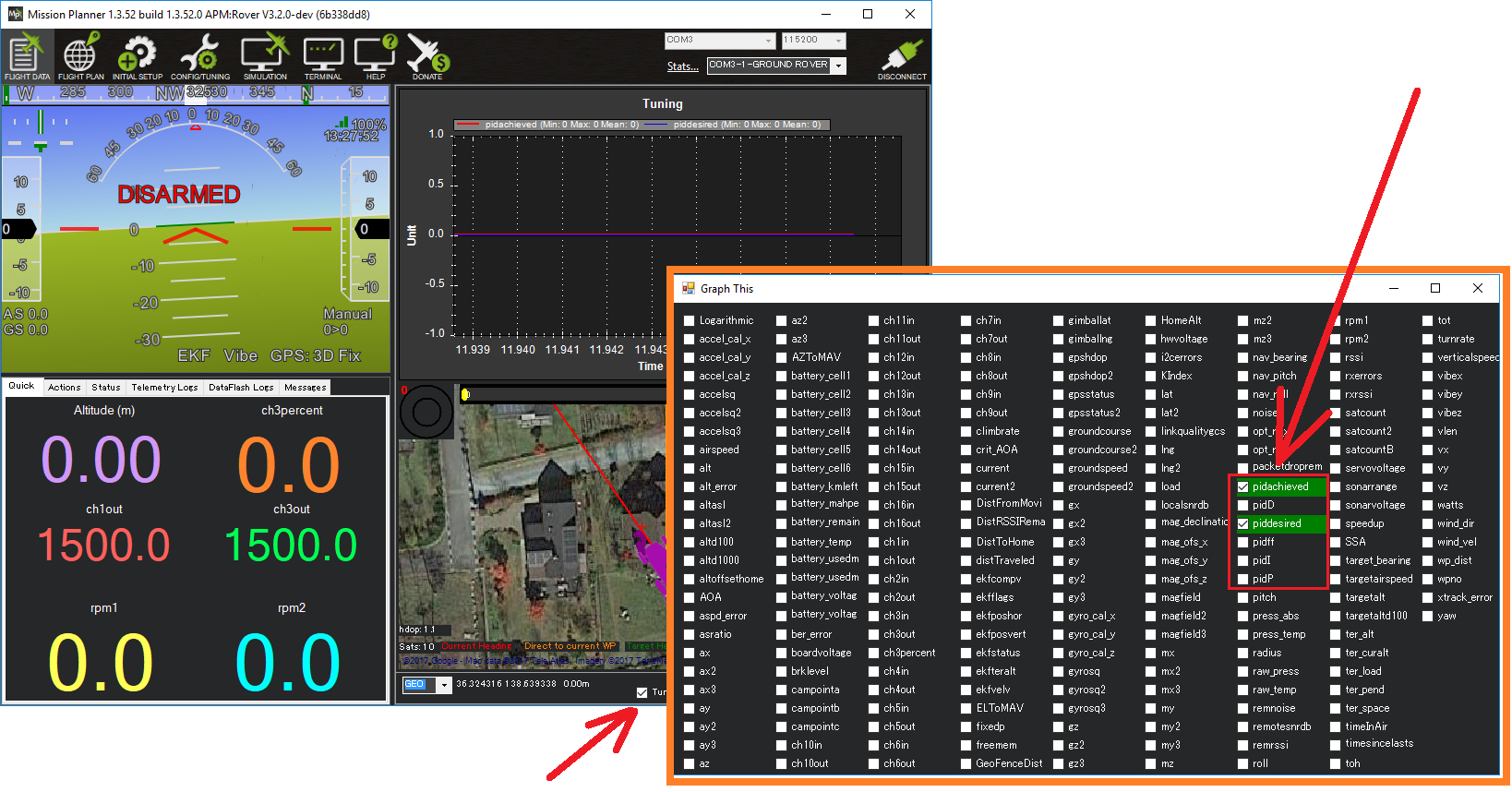
将载具驶入 Acro 以中速行驶,转各种大弯和小弯,并比较 Pidachieved 和 Piddesired 的效果。
调整 FF 增益 第一。该增益将所需的转向率直接转换为转向伺服或电机输出。如果载具的转弯速率响应迟缓,则应增加该参数。如果载具不断超出预期转向率,则应减小该参数。
"这款" P 增益 校正短期误差。如果 FF 值设置合理,通常可以将其设置为较低值(例如 FF 的 20%)。如果设置过高,转差率可能会振荡。这 P 增益 应始终低于 FF 增益.
"这款" 我的收获 修正长期误差。通常可将其设置为与 P 相同的值。如果载具从未达到理想的转弯率,则应增加该参数。如果载具的转弯速度缓慢摆动,则应减小该参数。此参数 我的收获 应始终低于 FF 增益.
"这款" D 增益 的作用是抵御转差率的短期变化,从而稳定输出。该增益通常可以保持为零。
最后设置 atc_str_rat_max 到 ACRO_TURN_RATE 值,并可选择降低 ACRO_TURN_RATE.这两个参数的区别在于
ACRO_TURN_RATE 控制在 Acro 模式下如何将驾驶员的输入转换为所需的转弯速率。可以降低该参数,使驾驶员在 Acro 模式下的转弯更加顺畅
atc_str_rat_max 是载具在任何模式下尝试的最大转弯速率。通常应保持在接近载具性能极限的范围内,以便载具保持灵活性