为 Bebop 2 建造¶
这些说明解释了如何使用 ArduPilot 进行 Bebop2 在 Linux 机器上运行。Bebop 2 基于与 Bebop 相同的架构,但有一些明显的变化,尤其是采用了质量更好的 GPS(天线更大的 UBlox GPS)。
警告
进行本文所述的更改将使您的保修失效!派诺特的技术支持将无法帮助您解决这一问题或恢复您的原始软件。
为 Bebop 2 制作 ArduCopter¶
提示
如果只想试用(实验性的)二进制版本,可以跳过这一步。
下面的步骤展示了如何为 Bebop 2 定制 Copter 软件:
安装 armhf 工具链¶
安装派诺特版本的 linaro arm-linux-gnueabihf 工具链,可从 这里
安装(工具链将在 /opt 中解压缩)
苏都 dpkg -i 鹦鹉学舌-工具-linuxgnutools-2016.02-linaro_1.0.0-5_amd64.辩论
在 PATH 变量中添加工具链路径
export PATH=/opt/arm-2016.02-linaro/bin:$PATH
下载并编译 ArduCopter¶
克隆 ardupilot 软件仓库
git 复制 --递归-子模块 https://github.网/ArduPilot/ardupilot.git CD ardupilot
构建飞行控制固件的方法几乎相同。 为 Pixhawk 建造 构建命令除外:
./waf 配置 --官方=呜呜 ./waf 构建
上传固件¶
Mission Planner地面站现在可以将稳定版和定制版 ardupilot 上传到 Bebop2。
以下是手动上传方法的说明
安装 adb(安卓调试工具):
苏都 适切-获取 安装 机器人-工具-adb
连接 Bebop2 的 WiFi 网络 (BebopDrone-XXXX)。
按下电源按钮 4 次,启用 adb 服务器。
通过 9050 端口连接 Bebop 的 adb 服务器:
adb 接通 192.168.42.1:9050
如果前一个命令返回错误,请重试(按 4 次电源按钮并重试)。
将系统分区重新挂载为可写分区:
adb 外壳 挂载 -o 重装,rw /
将剥离的二进制 arducopter 推到 Bebop2 上:
adb mkdir /数据/ftp/内部_000/APM adb 推动 自动飞行器 /数据/ftp/内部_000/APM/
启动 ArduPilot¶
关闭普通(飞行)控制器
adb 外壳 kk
发射旋翼飞行器:
CD /数据/ftp/内部_000/APM 自动飞行器 -A udp:192.168.42.255:14550:bcast -B /设计/ttyPA1 -C udp:192.168.42.255:14551:bcast -l /数据/ftp/内部_000/APM/原木 -t /数据/ftp/内部_000/APM/地形
启动 Copter¶
至于 Bebop,请修改启动脚本 /etc/init.d/rcS_mode_default.注释以下一行:
龙启动器.吁 -out2null 及样品;
替换为
/数据/ftp/内部_000/APM/自动飞行器 -A udp:192.168.42.255:14550:bcast -B /设计/ttyPA1 -C udp:192.168.42.255:14551:bcast -l /数据/ftp/内部_000/APM/原木 -t /数据/ftp/内部_000/APM/地形 及样品;
按下电源按钮 4 次,启用 adb 服务器。
如前所述,连接到 adb 服务器:
adb 接通 192.168.42.1:9050
将系统分区重新挂载为可写分区:
adb 外壳 挂载 -o 重装,rw /
为了避免手动编辑文件,您可以下载 这个.
保存原版,并将此版推至 Bebop
adb 外壳 cp /等等/启动.d/rcS_mode_default /等等/启动.d/rcS_mode_default_backup adb 推动 rcS_mode_default /等等/启动.d/
同步并重新启动:
adb 外壳 同步 adb 外壳 重新启动
恢复¶
要进行恢复,可以使用与 Bebop 相同的电缆,参见 这里.
用 Torx T6 螺丝刀卸下两颗螺丝

将颈部拉向 Bebop 的前方,取下颈部

UART 连接器位于右侧
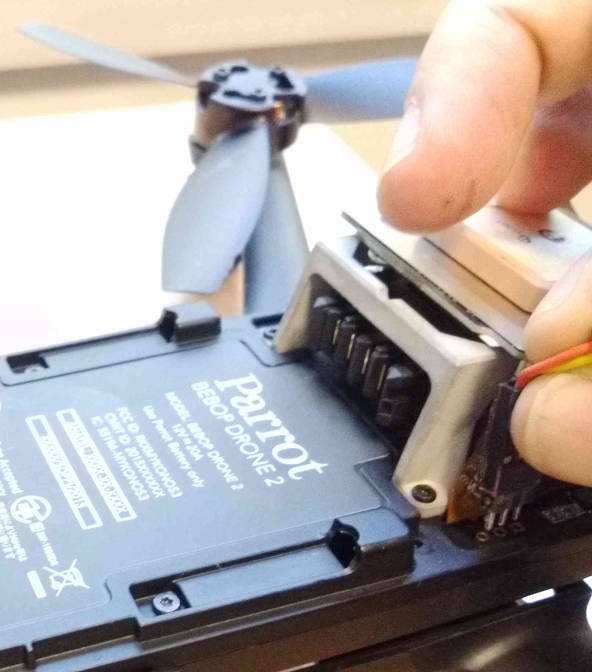
将电缆的黑线插在前端

使用任何终端模拟器通过 UART 端口连接 bebop
将备份的 rcS 文件复制回原处
挂载 -o 重装,rw / cp /等等/启动.d/rcS_mode_default_backup /等等/启动.d/rcS_mode_default
同步和重启
同步 重新启动
通过 UDP 进行飞行和遥控¶
UDP 上的飞行和遥控指令与 Bebop
基本配置和框架参数¶
调整参数集如下 这里.Bebop 2 还没有完全调试好。
为了进行基本配置和校准,您可以使用任何一个通用控制系统并执行:
磁强计校准
遥控校准
加速度计校准
其他信息¶
与第一代 Bebop 相比,由于采用了更好的 UBlox GPS,位置悬停模式的质量非常好。现在,在您想要的模式下起飞和降落都很安全。
目前还不支持视频,光流和声纳正在开发中。
现在正是参与并帮助改进它们的大好时机!