纳米雷达 MR72¶
备注
固件 4.6 及更高版本支持该传感器。Plane 不支持该传感器,因为它是一个接近传感器。
"这款" MR72 是 77Ghz 波段雷达,常用于避开/探测目标。目前只支持通过 CAN 连接。官方不支持该雷达的串行版本。
通过 CAN 连接¶
通过 NSM 软件设置传感器。如果计划在一条 CAN 总线上使用多个 MR72,尤其要将 "ID "设置为唯一编号。您还可以通过软件设置比特率。
备注
ArduPilot 目前不支持将相同的 CAN 测距仪连接到不同的 CAN 端口。如果您想同时使用多个 CAN 测距仪,请将它们连接到同一总线上。
连接(飞行)控制器¶
通过制造商提供的 NSM 工具设置传感器。更多详情请见 这里.如果计划在一条 CAN 总线上使用多个 MR72,请将 "ID "设置为唯一编号。还可以通过软件设置比特率,使其与 CAN 总线比特率一致(建议使用 500000)。
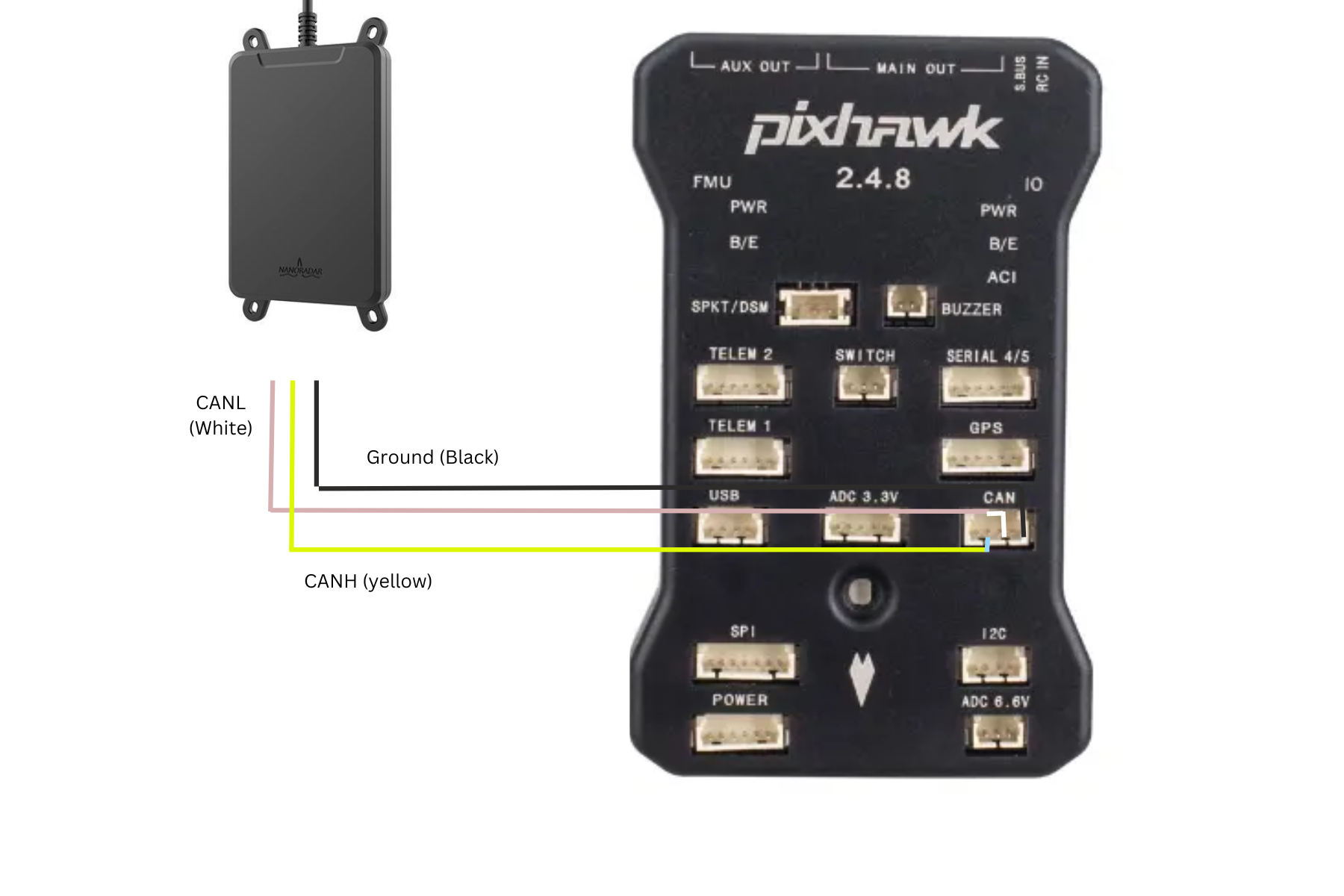
对于(飞行)控制器连接,您可以使用任何备用 CAN 端口。由于这不是一个基于 DroneCAN 的传感器,因此您不能将所连接的端口用于任何其他传感器。下图显示了如何连接 CAN2。
设置以下参数
CAN_P2_DRIVER = 2(使用第二个 CAN 驱动程序启用第二个 CAN 端口)
CAN_P2_BITRATE = 500000(或在助理 NAssistant 中设置的值)
can_d2_protocol = 14(纳米雷达)
PRX1_TYPE = 17 (MR72_CAN) 设置后重新启动。
PRX1_ORIENT 如果安装在载具顶部,则 = "0";如果倒置安装在载具底部,则 = "1"。
PRX1_YAW_CORR 可以调整装置的前进方向。确定这一角度的方法之一是使用Mission Planner地面站的设置>>高级、近距离查看器,然后绕着飞行器走一圈,确保扇形距离适当缩短。
PRX1_IGN_ANG1 和 PRX1_IGN_WID1 应保持默认值。
有关在 Copter 上使用该传感器避开物体的更多详情,请查阅 这里.
测试传感器¶
传感器读取的距离可在Mission Planner地面站飞行数据屏幕的状态选项卡中查看。仔细查找 "测距仪 1"。