精确着陆和着陆¶
概述¶
旋翼飞行器支持使用 红外锁定传感器 和一个 声纳或激光雷达或通过 MAVLink LANDING_TARGET 信息 来自配套计算机的数据,提供与目标(例如一个 四月标签.
使用该系统,当飞行器进入 "着陆 "模式(并有 GPS 或光流等定位辅助源)时,可以在距离移动速度小于 1 米/秒的红外信标 30 厘米范围内可靠着陆(除非 PLND_OPTIONS 第 0 位设置为允许移动着陆目标)。
Copter 还支持 "精确着陆",允许飞行器在 "着陆 "模式下保持在目标上方的位置。飞行员可以使用发射机的一个 辅助功能开关.
精确装载演示:
运行¶
启用并激活 "精确着陆 "功能后,将在着陆过程中提供最终定位,而不是仅通过 GPS 数据。如果着陆目标丢失(即相对于目标的位置更新不发生),如果 PLND_STRICT 在适当设置后,它会尝试爬到由 plnd_ret_behave_行为.然后,它会再次尝试降落,希望能看到着陆目标。它会一直这样做,直到 PLND_RET_MAX 重试。然后,根据 PLND_STRICT在这种情况下,它要么会直接降落,要么会在空中盘旋(例如,在不想降落在水面上的船只上降落时非常有用)。
飞行员在着陆过程中手动重新定位将导致着陆失败,除非 PLND_OPTIONS 第 1 位被设置。最终着陆速度可降至低于 LAND_SPEED 以确保精确着陆。通过设置 PLND_OPTIONS 第 2 位
参数¶
PLND_ENABLED 设为 1 可启用此功能,刷新参数可查看以下内容:
PLND_TYPE 设置着陆位置来源类型、红外锁定、MAVLink LaANDING_TARGET 信息、SITL 或 GAZEBO 模拟。0 禁用。
plnd_xy_dist_max 如果检测到着陆目标,且距离超过这个米数,飞行器将不会开始下降。设置为 0 则始终下降。
PLND_STRICT 如果目标丢失,载具应如何严格地降落在目标上
PLND_TIMEOUT 即使目标丢失,飞行器继续下降的时间。过了这段时间,飞行器将尝试着陆重试,具体取决于 PLND_STRICT 参数。
plnd_ret_behave_行为 重试时如何报告移动到最后一个有效着陆目标的情况
PLND_ALT_MIN 即使目标在此高度以下丢失,飞行器也会继续垂直降落。这需要测距仪才能起作用。设置为 0 则禁用。
PLND_ALT_MAX 如果未找到目标,飞行器将继续垂直降落,直至此高度。在此高度以下,如果未找到着陆目标,可能会尝试着陆重试/故障安全。该功能需要测距仪才能工作。设置为零可禁用此功能。
PLND_OPTIONS 如果着陆目标正在移动,则设置第 0 位;设置第 1 位可在手动重新定位后继续精确着陆;设置第 2 位则使着陆下降曲线与正常着陆模式相似(即未启用精确着陆的着陆模式通常具有更快的最终下降速度)。
其他 PLND_ 如果需要,还可提供参数来调整着陆探测器在载具上的位置。
MAVLink LANDING_TARGET 基于消息的系统¶
将配套的计算机视觉系统与诸如 四月标签在此情况下,着陆位置的位置误差可通过以下方式发送给(飞行)控制器 MAVLink LANDING_TARGET 信息 .
红外锁定系统¶
从何处获取¶
"这款" 红外锁定传感器 可从 irlock.com.红外锁定传感器是一个改进版的红外锁定传感器。 小精灵相机该传感器已预先配置为红外信标探测器。有多种红外信标可与传感器兼容。传感器 MarkOne 灯塔 在 一应俱全 照明条件检测范围为 15 米. 信标(V1.1) 是一种成本效益更高的选择,可以可靠地在 大多数照明条件.
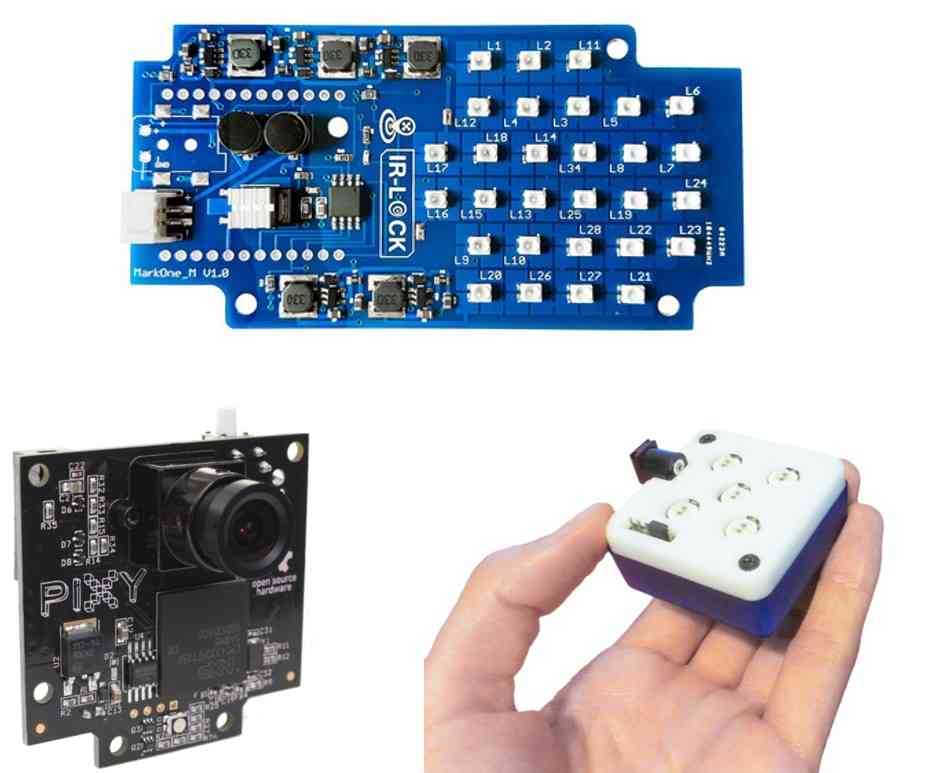
红外锁定传感器和红外信标¶
连接(飞行)控制器¶
红外锁定传感器可通过一个红外传感器直接连接到 autopiot。 I2C 电缆.如果使用多个 I2C 传感器,则需要一个 I2C 分路器.更详细的说明载于 irlock.com 文档.
其他 PLND_ 如果需要,还可提供参数来调整着陆探测器在载具上的位置。
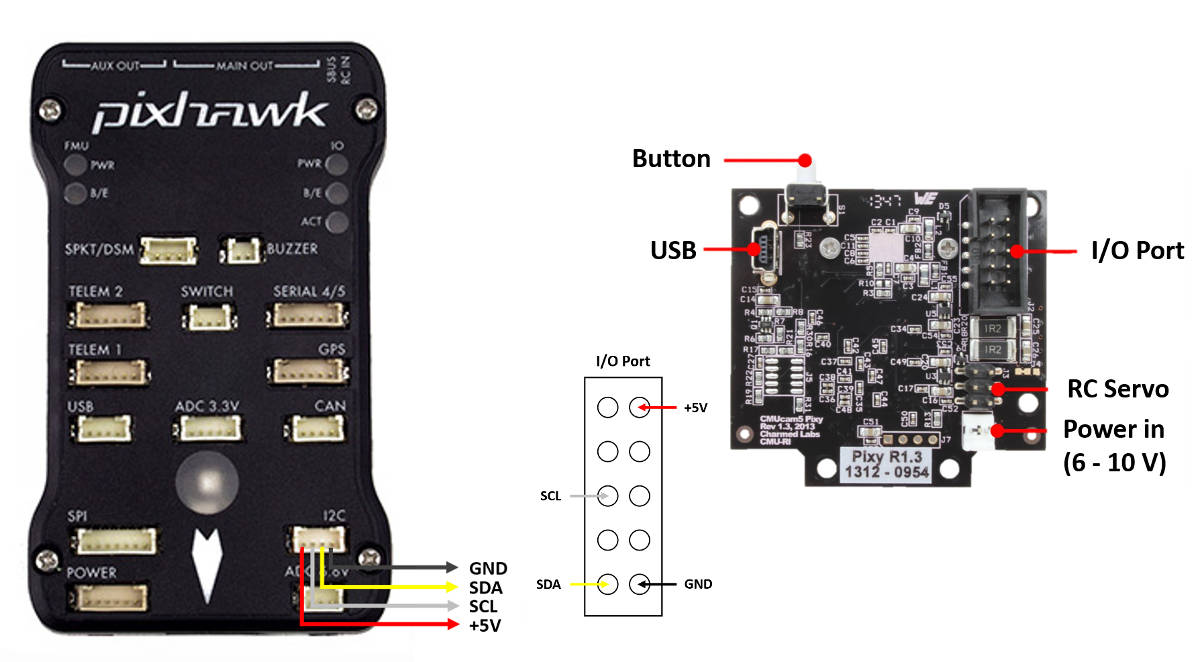
IRLock 传感器/(飞行)控制器接线¶
安装到框架上¶
IRLOCK 传感器应安装在框架的底部,摄像机镜头应直接朝下对准地面。用于 IRIS 的安装支架已售出。 这里 (如下图所示)。传感器板的方向应使板上的白色按钮朝向载具前方(或者换一种说法,最靠近摄像头镜头的一面应朝向载具前方)。
下图显示的是相机安装在 底层 的 3DR IRIS+。最好将传感器安装在尽可能靠近(飞行)控制器的位置,但也进行过不同安装位置的成功测试。
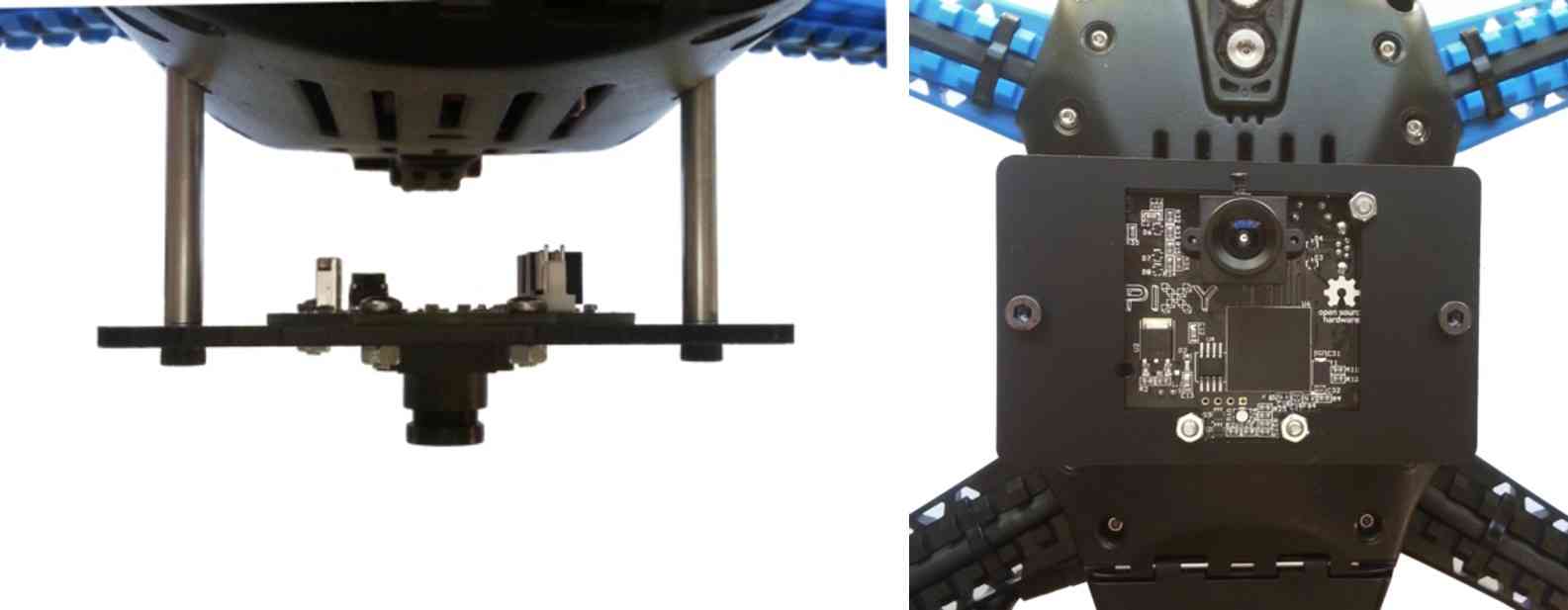
安装在光圈+底部的红外锁定传感器¶
通过Mission Planner地面站进行设置¶
通过Mission Planner地面站(或其他 GCS)设置以下参数以启用精确着陆功能,然后重新启动(飞行)控制器。
PLND_ENABLED = 1
PLND_TYPE = 2
要启用精确装载功能,需要 辅助功能开关 必须设置为 39 才能启用 "精确装载 "功能
在 Copter-4.0 之前的版本中,可通过 Mision Planner 将 CHx_OPT 参数设置为 39 以启用此功能。
飞行和测试¶
将飞行器的其中一种飞行模式设置为 "着陆"(在编写本维基页面时,精确着陆功能仅在 "着陆 "模式下运行)。
将红外信标放在地面上,然后起飞到目标上空约 10 米处。将飞行器切换至 "降落"。如果一切运行正常,旋翼飞行器应向红外信标移动。成功演示如下(使用旧固件)。
提示
如果出现意外的突然移动,应做好重新控制的准备(将模式切换为稳定、AltHold 或 Loiter)。
如果载具表现正常,请下载数据闪存日志并检查 PL 信息。
如果 "Heal"(健康)字段不为 "1",则(飞行)控制器和红外锁定传感器之间可能存在通信问题。
如果 "TAcq"(表示获取目标)字段不为 "1",则表示传感器没有看到目标。
pX 和 pY 值表示目标与飞行器之间的水平距离。
vX 和 vY 值显示目标相对于飞行器的估计速度。