外部 LED¶
可将外部 LED 或 LED 显示器连接到(飞行)控制器的 I2C 端口,或者在 4.0 及更高版本中,如果是串行编程设备,则可通过使用该输出的 SERVOx_FUNCTION 输出来添加外部 LED 或 LED 显示器。还支持 CANBUS 上的 DroneCAN LED(参见 DroneCAN 设置 ).
备注
请注意,适用于将输出设置为不同 PWM 速率和/或 DShot 的分组限制同样适用于 LED,因为与每组输出相关的定时器不能用于不同的速率。另请参见 混合使用 ESC 协议
带 I2C 连接的 RGB LED/显示器¶
支持两种 I2C 设备:使用 LED 驱动芯片的 I2C 连接 RGB LEDS 和 OLED 显示器。
支持的 RGB LED/驱动器有
东芝 LED(已停产)
PCA9685 驱动程序
NCP5623 驱动程序
支持的 OLED 显示器为 SSH1106 和 SSD1306,显示像素为 128x64。参见 机载显示屏 了解更多信息。

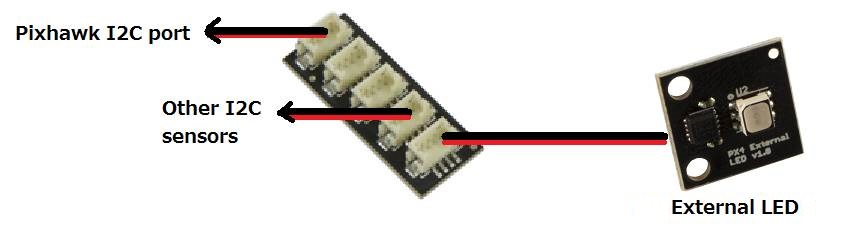
因为大多数用户使用外部 GPS 和指南针模块因此,建议使用 I2C 分路器,如下图所示。分线器 NTF_LED_TYPES 参数应设置为所使用的控制器类型。
串行连接设备¶
目前,ArduPilot 支持 Neopixel 和 ProfiLED RGB LED 灯串。它们可以像其他 RGB LED 一样用于(飞行)控制器的 NTF 状态和警告通知,也可以使用(飞行)控制器 SD 卡上的 LUA 脚本进行无限编程。要与脚本一起使用,必须将输出功能设置为脚本输出功能(94 - 109),然后脚本将此输出分配给 LED。参见 Lua 脚本 了解更多使用 LUA 脚本的示例。
串行 LED 需要一个完整的 PWM 组,有关(飞行)控制器 PWM 组的更多信息,请参阅(飞行)控制器的 硬件页面.要检查所需输出的设置是否正确,请查看 GCS 信息选项卡中的 PWM 类型信息。请参见 GPIO
备注
确保输出配置为普通 PWM 而非 GPIO 输出。带有 IOMCU 的飞行控制器只能使用 AUX 输出来连接串行 LED。要检查所需输出是否设置正确,请在 GCS 的信息选项卡中查找 PWM 类型信息。请参见 GPIO
NTF LED 的含义¶
颜色和闪光模式的含义见下图 发光二极管含义 如果 标准 默认协议设置为 ntf_led_override.
LED 的亮度和数量可以通过修改 NTF_LED_BRIGHT 和 NTF_LED_LEN