Leddar One 激光雷达¶
"这款" Leddar One 激光雷达 是一款重量轻、价格合理的激光雷达,测距 40 米,更新率 70 赫兹,3 度漫射光束。有关详细信息,请参阅 数据表.

备注
Copter-3.4.2 (或更高版本)、Plane-3.8 (或更高版本)、Rover-3.1 (或更高版本)均支持 LeddarOne。
警告
在一些 Coptere-3.4.2 用户的日志中发现,报告的距离出现了严重的峰值,因此我们建议对报告的距离进行仔细的地面测试,或者等到 Copter-3.4.3 发布后再进行测试,届时我们希望能找出造成这些峰值的原因。
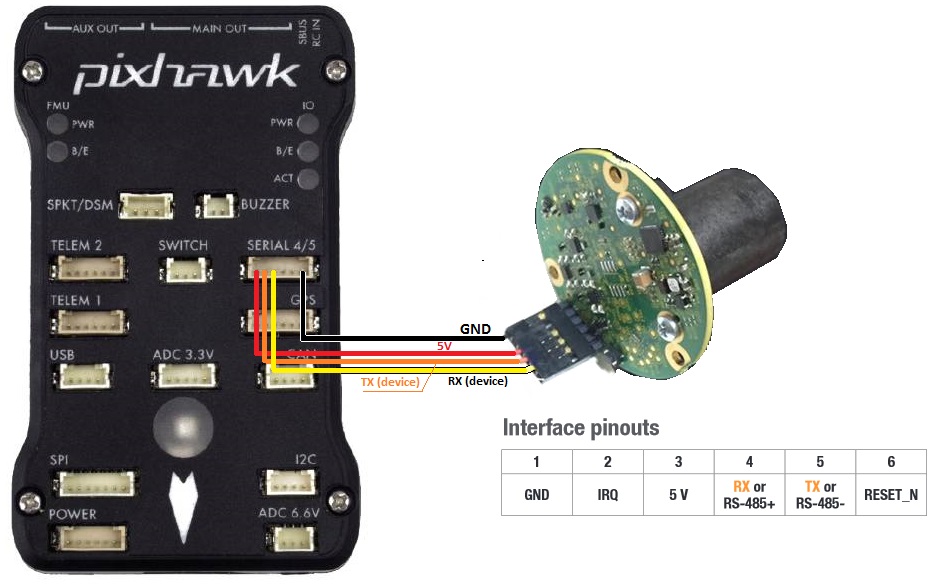
连接(飞行)控制器¶
传感器的串行连接可以连接到(飞行)控制器上的任何备用串行端口(如 Telem1、Teleme2、Serial4)。将激光雷达的 RX 线连接到(飞行)控制器的 UART TX 线,激光雷达的 TX 线连接到 UART 的 RX 线,然后连接 GND 和 5V 线。下图显示了如何将传感器输出引脚连接到 Pixhawk 的串行 4 端口。
然后需要设置串行端口和测距仪参数。如果使用的是 Pixhawk 上的 SERIAL4/5 端口,则需要为第一个测距仪设置以下参数(在Mission Planner地面站的 配置/飞行稳定调整 | 完整参数列表 页):
serial4_protocol = 9(激光雷达)
SERIAL4_BAUD = 115200
RNGFND1_TYPE = 12(LeddarOne)
rngfnd1_scaling = 1
RNGFND1_MIN_CM = 5
RNGFND1_MAX_CM = 4000 (40m) 这是测距仪能够可靠读取的距离(厘米)。
rngfnd1_gndclear = 10 或更准确地说是载具着陆时测距仪到地面的距离(厘米)。该值取决于您安装测距仪的方式。
如果您使用的是 Pixhawk 上的 Telem2 端口,则应设置为 serial2_protocol = 9,以及 SERIAL2_BAUD = 115200
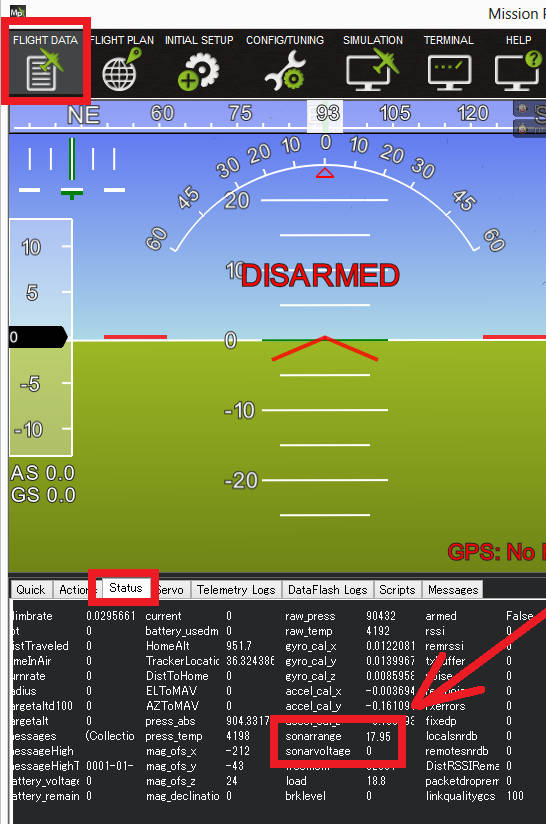
测试传感器¶
传感器读取的距离可在Mission Planner地面站飞行数据屏幕的状态选项卡中查看。仔细查看 "sonarrange"(声纳范围)。