珊瑚礁大师¶
珊瑚礁大师 是分析声纳数据的常用工具。本页提供了将 ArduPilot 无人艇采集的声纳数据上传到 ReefMaster 以生成二维和三维地图的步骤。
请注意,这些说明适用于声纳直接连接到(飞行)控制器且激光雷达仅提供简单距离的船只。ArduPilot 尚不支持直接读取声纳的侧扫或反向散射数据。
绘图前的步骤¶
"这款" 声呐 应直接连接到(飞行)控制器,并使用 RNGFNDx_ORIENT = "25" (向下)
机载日志 可能会很大,因此要确保(飞行)控制器插入的 SD 卡质量上乘、空间充足(8GB 或更大是不错的选择)。
从机载日志中提取 DPTH 信息¶
通过 MAVLink 下载机载日志 或弹出(飞行)控制器的 SD 卡,将其插入个人电脑,然后直接将 APM/LOGS 目录中的 .BIN 文件复制到个人电脑中
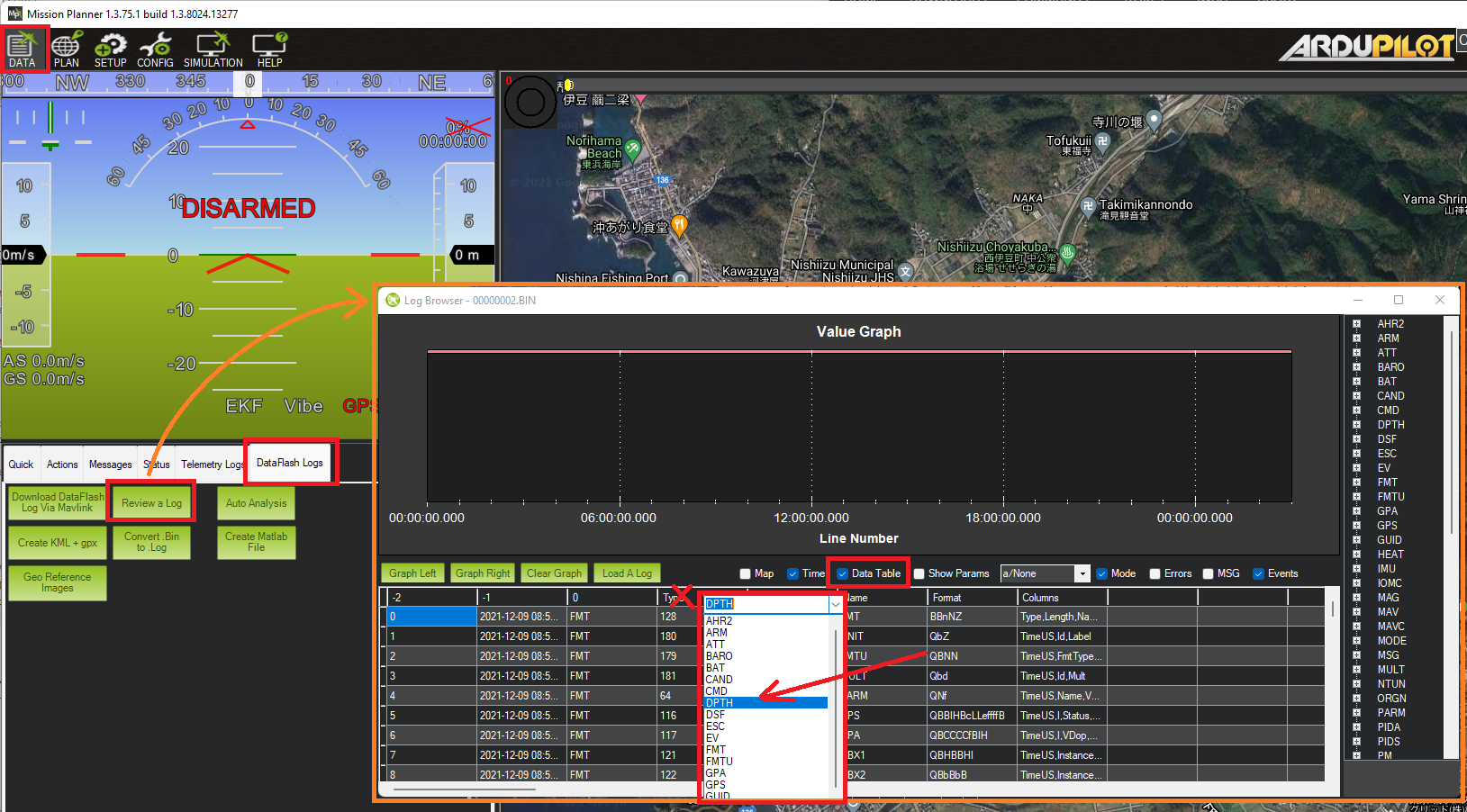
使用Mission Planner地面站的数据 >>数据闪存日志 >>查看日志功能打开 .BIN 文件
选中 "数据表 "复选框,然后单击数据表列标题的任意位置,从下拉列表中选择 "DPTH",并按下 "筛选 "按钮
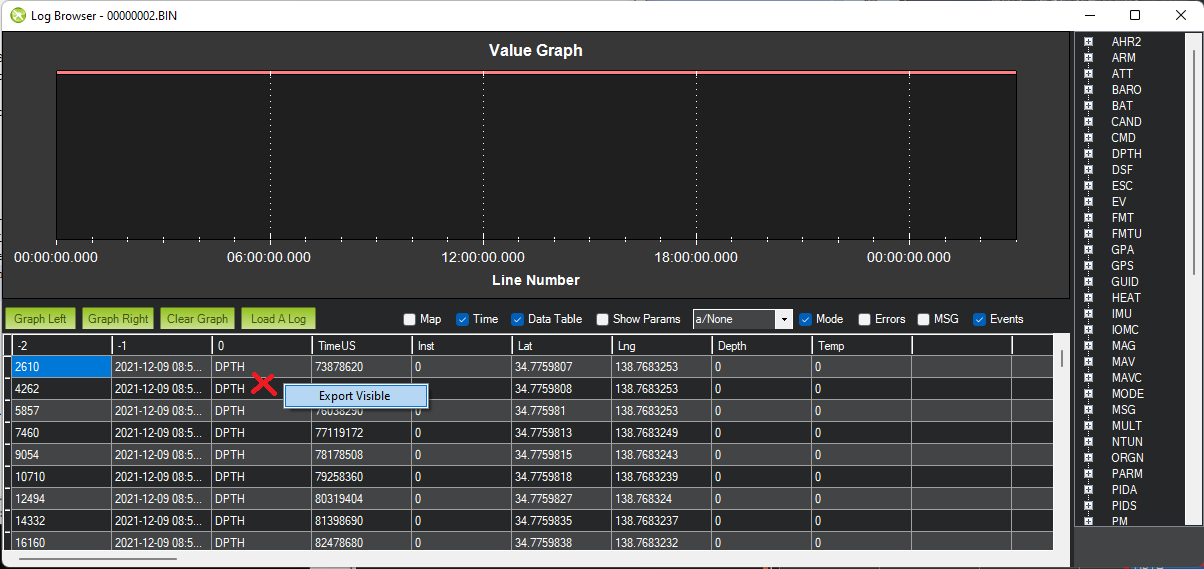
用鼠标右键单击数据区域,选择 "导出可见 "并保存为 .csv 文件
导入到 ReefMaster¶
打开 ReefMaster 并创建新工作区
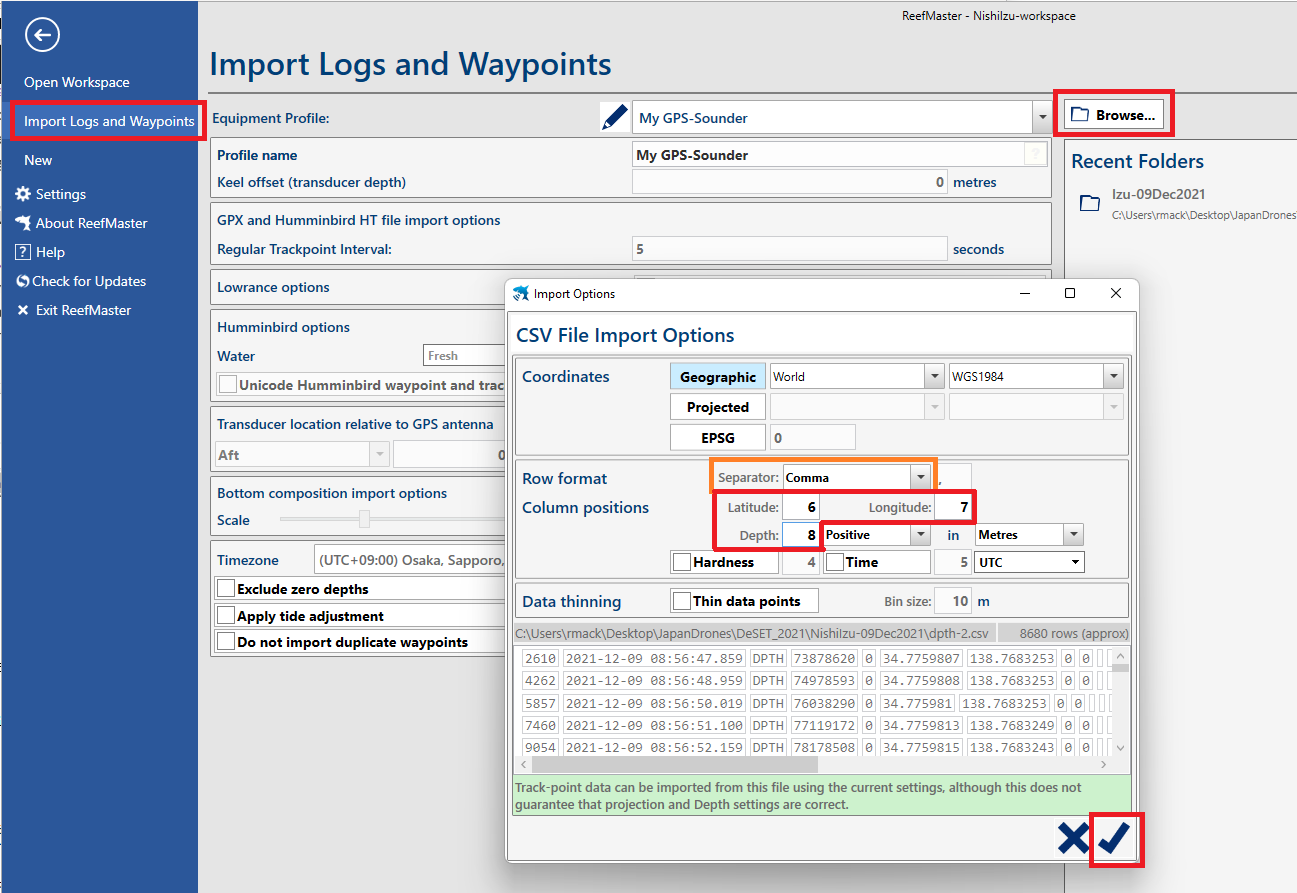
选择 "文件"、"导入日志和航点"、"浏览",然后选择上面生成的 CSV 文件
在 "导入选项 "窗口中设置以下字段,然后按下复选按钮
分隔符:逗号
纬度: 6
经度: 7
深度:8
接下来会出现 "导入 GPS 资产 "窗口,点击右下方的复选按钮
按左上角的箭头返回主视图
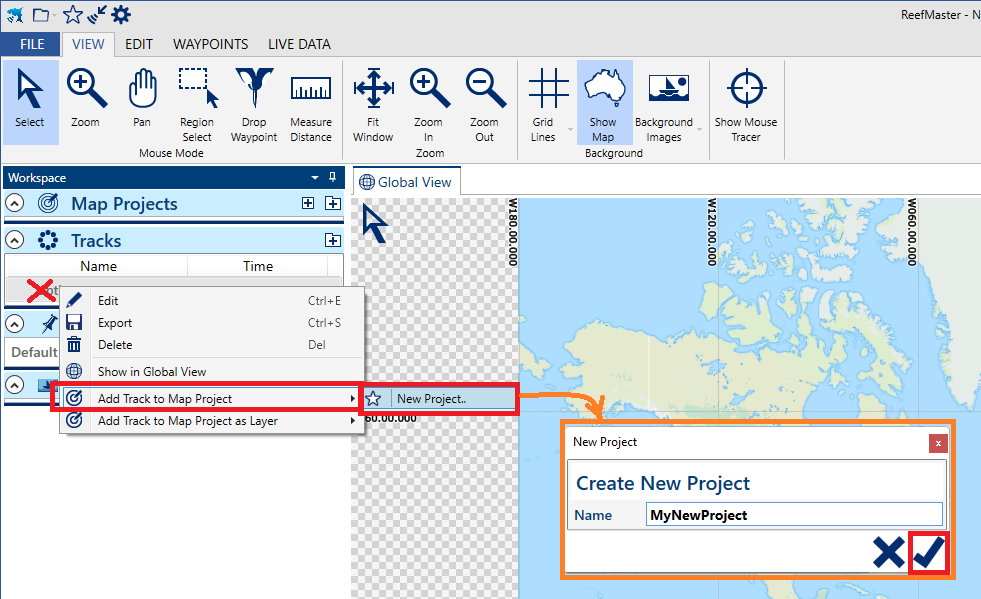
在 "轨迹 "下,用鼠标右键单击新轨迹,然后 "将轨迹添加到地图项目">> "新建项目"。声纳数据应出现在地图上。
创建 2D/3D 地图¶
在 "项目 "下点击 "定义地图区域",选择一个有声纳数据的区域
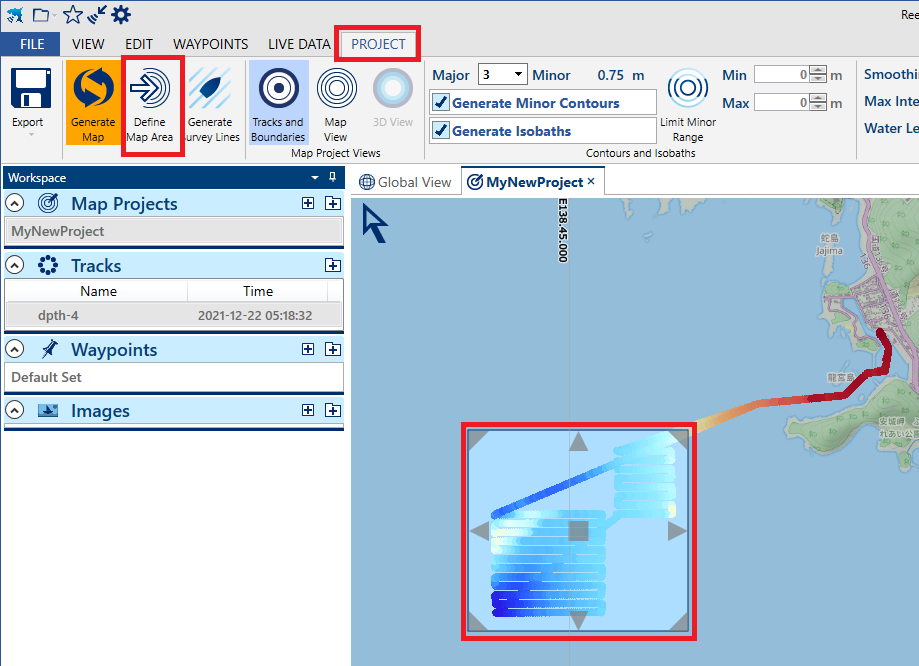
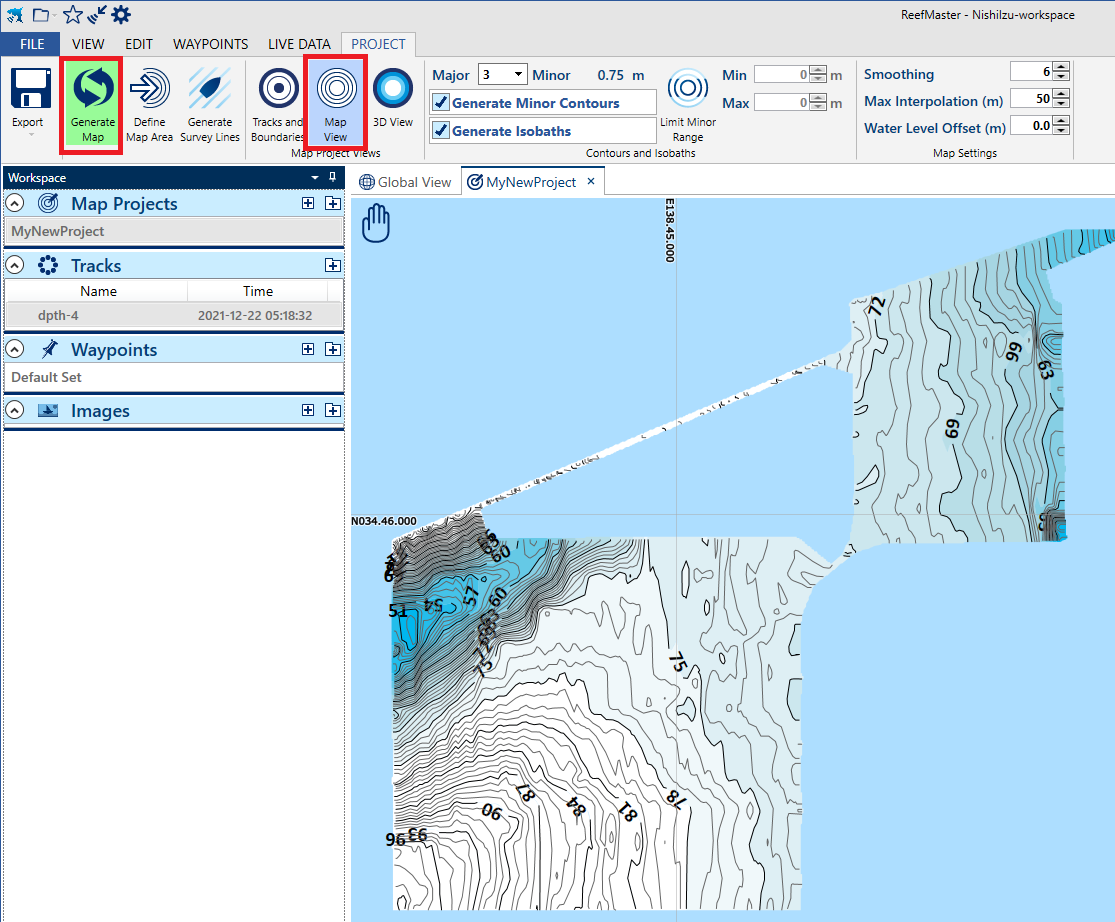
按 "生成地图 "和 "地图视图 "按钮生成二维地图
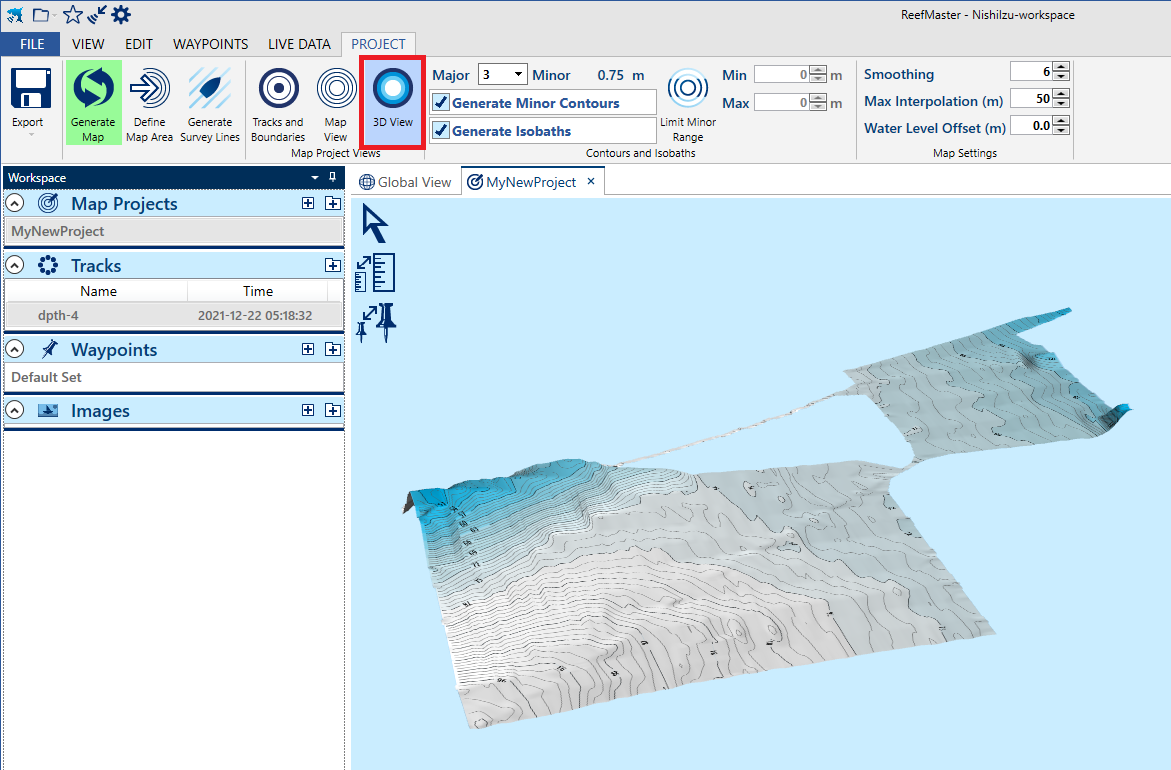
按 "3D 视图 "生成 3D 地图
按 "导出">> "导出地图项目 "创建图像或 Google 地球 KMZ 文件