Mission Planner地面站 CLI 设置测试模式¶
命令行解释器¶
Mission Planner地面站命令行解释器是一个串行终端行编辑器,其工作方式类似于以前的 DOS 提示操作系统。如果需要,您可以通过命令行解释器 (CLI) 设置和测试 APM。它只能通过 USB 电缆使用,不能通过 Xbee 或 3DR 无线遥测连接使用。在Mission Planner地面站中选择 "终端 "选项卡(确保串行波特率设置为 115200),打开终端。这将弹出终端窗口,它将自动带您进入 APM CLI 菜单(如果没有,请单击窗口并按三次 "回车键"):

现在,您可以在命令提示符下输入命令。你可以随时键入 "退出 "来离开任何模式。在下面的示例中,我将使用另一个串行终端(本例中为 Arduino 串行监视器)。你可以使用任何终端,但 Mission Planner 终端是最直接的。在这里,我键入 "help"(帮助)来查看可用命令列表:
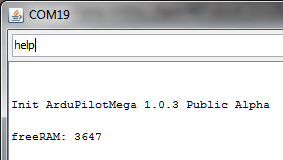
初始命令为
原木:日志回读/设置模式。飞行后使用)。
设置:初始设置模式)
测试:测试模式)
设置¶
设置过程将根据您的特定遥控无线电设置和所需的飞行模式配置 APM。键入 "setup"(设置)并点击回车键进入该模式。 在飞行之前,您必须设置好无线电和模式。您还应该测试是否能锁定 GPS(在测试模式下使用 gps 命令),这通常意味着要在 GPS 模块能清晰看到天空的室外进行测试。 允许的设置命令有
重置:将 APM 重置为默认设置
收音机:设置遥控设置(见下文)
模式:为每个遥控拨动开关位置设置飞行控制模式(见下文)。
指北针:启用指南针。命令为 "打开指南针 "或 "关闭指南针"。
偏角:设置指南针的当地磁偏角。您可以在 此网页.虽然是以分和秒为单位,但还是要输入小数。所以
14° 10' E则输入 14.10。"电池":启用电池监控。输入选项 0-4(重复输入其他选项):
0 = 巴特 监测 残
1 = 监测 3 电池 电池
2 = 监测 4 电池 电池
3 = 监测 燃烧瓶 电压
4 = 监测 两个 电压 和 当前
"显示":显示 EEPROM 中的所有当前设置
"擦除":擦除 EEPROM
无线电设置¶
注意:APM 不为遥控接收机或舵机供电(尽管遥控设备可以为 APM 供电)。如果 APM 由 USB 供电,则还必须将电调/Lipo 或接收机电池连接至遥控 APM 引脚(通常,电调将插入输出 3,而接收机电池通常将插入接收机,接收机将通过遥控电缆向 APM 供电)。如果不单独为遥控系统供电,APM 将无法读取遥控输入端的任何信号。 在此模式下,您必须将两根摇杆移动到它们的所有极值,如下所示:将右摇杆移至右上方,然后移至右下方,再移至左上方,最后移至左下方。然后重复左摇杆。顺序并不重要,重要的是每根棍子都要打到所有四个角。在每个角上按住摇杆一秒钟。以下是典型的无线电设置过程截图:
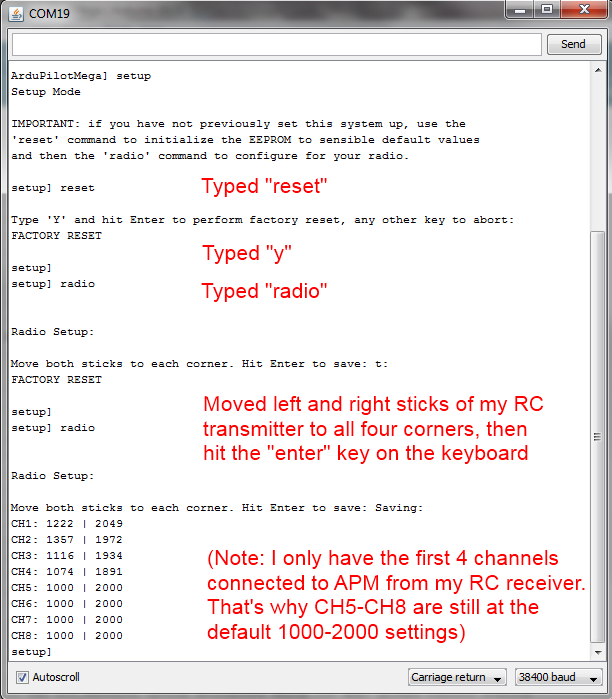
备注:如上图所示,已连接通道的 RC 读数低端应在 1,000-1,300 左右,高端应在 1,900-2,000 左右。(读数正好为 1,000 和 2,000 表示该通道根本没有连接)。如果读数都在 1,500 左右,可能有三种原因:
在测试过程中,您没有将两根摇杆移动到范围内的所有四个角落,或者移动得太快了。
您的遥控连接插头插错了,或者插反了,或者插错了针脚,或者没有进行连接
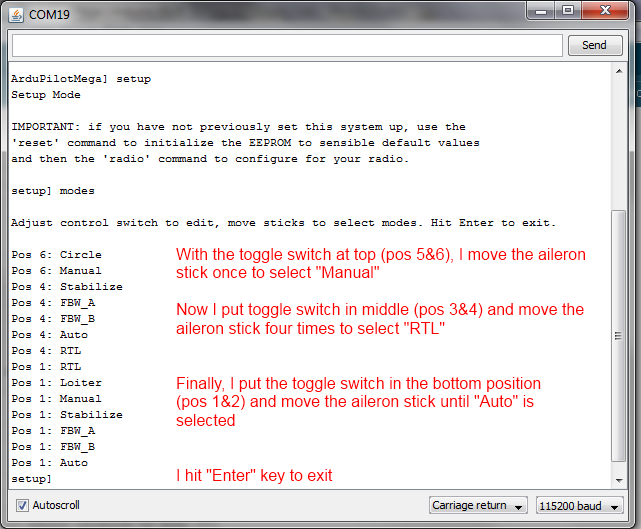
飞行控制模式¶
下面介绍如何设置飞行控制模式:在 CLI 中,进入设置模式。输入 "modes"(模式)并按回车键。现在,当您将控制开关移动到各个位置时,就可以看到飞行模式的显示。如果您想更改模式,请使用无线电上的方向舵/副翼控制杆。只需向右或向左移动控制杆,模式就会递增。点击 "回车 "将退出模式并保存更改。请参阅此示例:
下面是视频教程:
检查伺服器是否反转¶
现在是回头看看是否需要翻转任何 DIP 开关来反转伺服的好时机。说明如下 这里.请记住,如果您驾驶的是升降舵飞机(飞翼或三角翼),也应使用 DIP 开关设置混合。如果您在驾驶普通飞机时发现通道 1 和通道 2 意外地组合在一起,这意味着您意外地将其设置为升降舵模式。按下最后一个 DIP 开关即可恢复正常。
日志¶
该模式允许您读取和管理机载 16MB 数据闪存中的飞行日志文件。注意:在尝试使用日志功能之前,必须先进行擦除。如果不先进行擦除,将导致问题和显示错误结果。
"转储(n)":转存日志 "n"
"擦除":删除所有日志
"启用(名称)或全部":启用记录 "名称 "或所有内容
"禁用(名称)或全部":禁止记录 "名称 "或所有内容
CLI APM 测试套件¶
APM 自带许多板载测试。要使用它们,请在 CLI 中输入 "test"(测试)和 "help"(帮助),以查看所有不同的测试:
巴罗:显示气压计的数据
指北针:如果磁力计已连接并启用,则显示来自磁力计的数据
保险测试加速度计和陀螺仪:测试加速度计和陀螺仪
光流:测试光流量传感器
接力:测试板载继电器(每五秒钟打开和关闭一次;您应该能听到微弱的咔嗒声)
外壳:访问 NSH 外壳(仅限 Pixhawk)
测距仪:测试测距仪传感器