已归档:将代码加载到 APM2.x¶
您需要什么?¶
设置软件驱动程序¶
首先,下载并安装 Arduino(见上面的链接)。如果您从未使用过 Arduino,请使用 这些设置说明 熟悉 Arduino 基础知识。
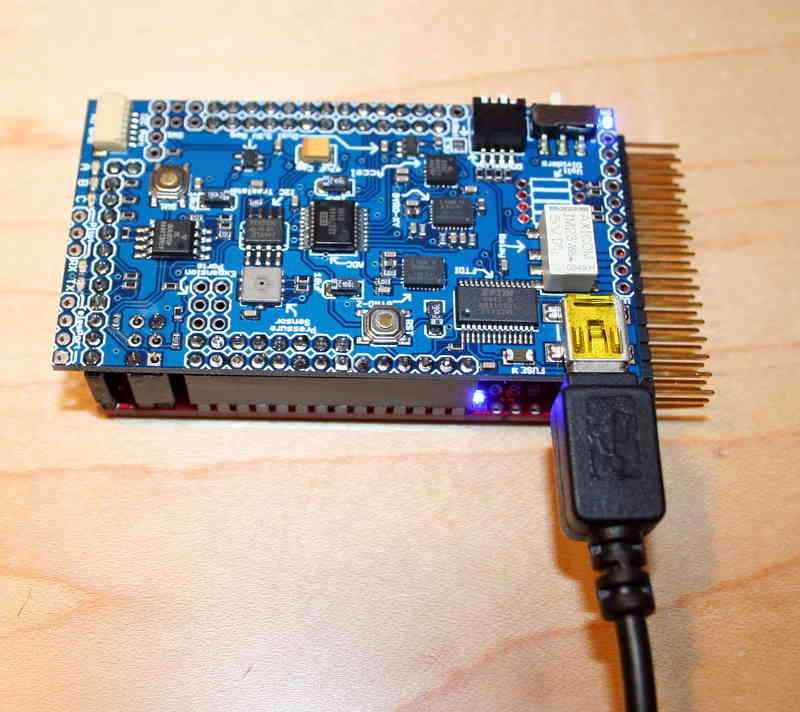
接下来,为 APM 的 USB 接口设置驱动程序。大多数人会使用普通 USB-A 至 miniB 电缆(一边是普通 USB,另一边是 mini USB)通过 IMU 屏蔽连接 APM,但如果不使用该屏蔽,则可以使用 FTDI 电缆。下面的图片展示了如何插入这些电缆。
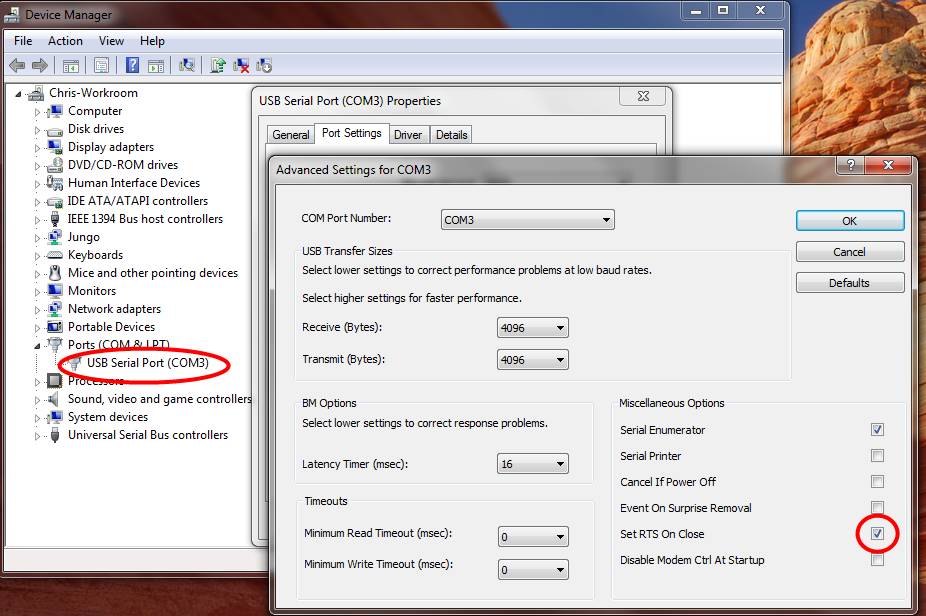
当您首次将 APM 或 FTDI 电缆插入电脑时,Windows 7 应该会识别 FTDI USB 转串行芯片并安装正确的驱动程序,但如果 Windows 7 无法识别,或者您使用的是较早版本的 Windows,则应从以下网址下载并安装适合您操作系统的驱动程序 这里.完成上述操作后,重启电脑并重新插入电缆。它应该会被识别,并显示在 Windows 设备管理器(可在 Windows 控制面板中找到)中,如下图所示(您的 COM 端口可能是不同的数字;它是由 Windows 根据您连接的其他设备的数量分配的)。这就是您在 Arduino 和 APM 的所有其他 USB 交互中使用的 COM 端口。
注意:如果使用的是 FTDI 电缆,则必须进入控制面板/设备管理器,更改分配给 FTDI/USB 电缆的 COM 端口。找到如图所示的 USB 串行端口条目(您的 FTDI 可能被分配到与下图所示 3 个端口不同的端口,至于分配到哪个端口并不重要),然后在属性/端口设置/高级下,确保选中 "关闭时设置 RTS "复选框,如下图所示。一旦做了一次这样的更改,就不必再做第二次了。
连接电缆¶
FTDI 或 USB 电缆可为桌面使用提供足够的电源,但可能无法驱动两个以上的普通舵机。如果您想驱动更多的舵机或使用数字舵机,则需要额外的电源(通常是连接到 APM 一个舵机输出端的电调)。
如果使用 USB 电缆,请在此处连接:
如果使用的是 FTDI 电缆,请在此处连接,注意电缆黑色和绿色面的标记:

设置 Sketchbook 文件夹¶
接下来,您必须定义 Arduino 用于存放 "草图"(Arduino 术语,指组成程序的文件集)和库的文件夹
在你能找到它的地方创建一个文件夹,也许在你的文档文件夹里,甚至在你的桌面上。(如果你一直在使用 Arduino,你可能已经在某个地方设置了这个文件夹)。启动 Arduino IDE 并打开 首选项 对话框。将草图本位置设置为素描本 文件夹。我的文件夹在这里:
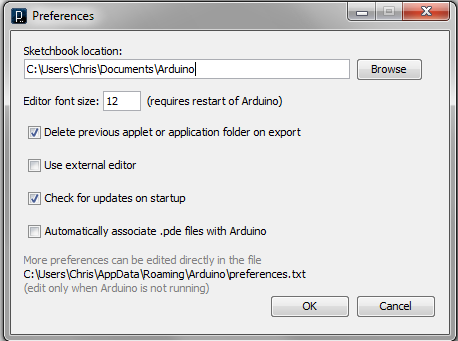
更改目录后,必须关闭 Arduino 并重新启动才能识别。
设置电路板类型¶
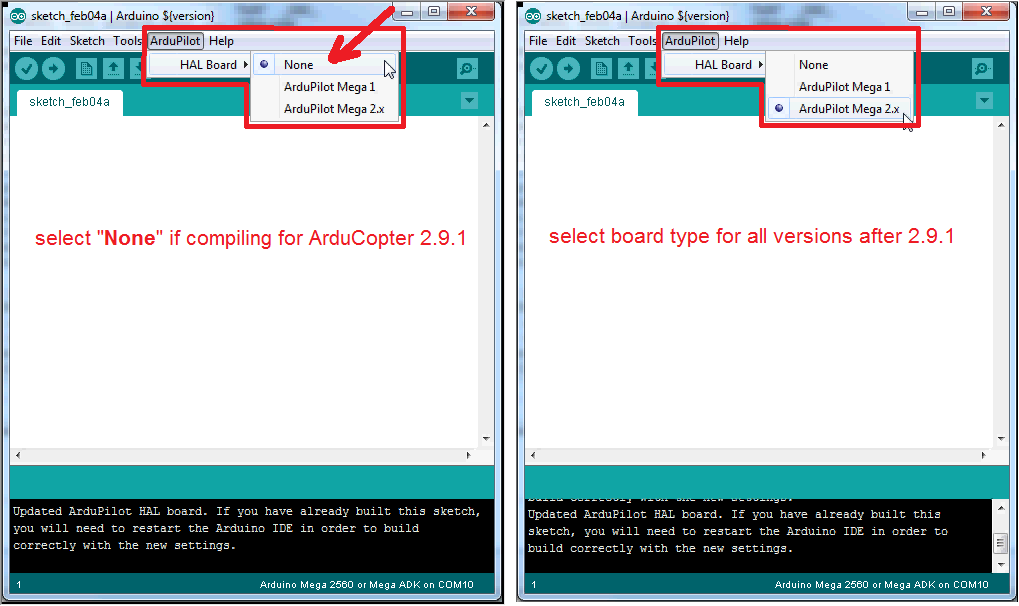
在我们改进版的 Arduino IDE 中,有一个新的 "ArduPilot "菜单,允许您选择电路板类型。
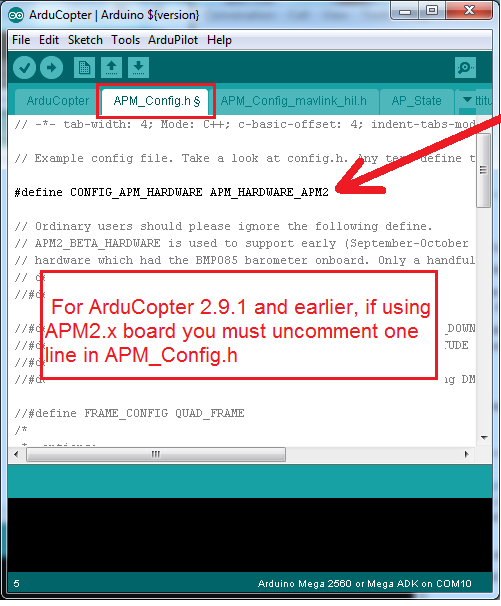
对于 Copter 2.9.1 及更早版本,您应从该菜单中选择 "无",然后确保 "工具 "下的 "板 "为 "ArduinoMega 2560 或 Mega ADK"。如果您使用的是 APM2,还需要取消 APM_Config.h 中第 5 行的注释(见底部截图)
对于 2.9.1 之后的版本,应根据编程板将 "ArduPilot"、"HAL Board "设置为 "ArduPilot Mega 1 "或 "ArduPilot Mega 2.x"。
备注
更改上述内容后,您需要重启 Arduino IDE。