电永磁机械手(OpenGrab EPM v3)¶
本文将介绍如何使用 电永磁机械手(OpenGrab EPM v3) 使用 ArduPilot。
概述¶
"这款" OpenGrab EPM v3 (来自 NicaDrone.com)是一款小型(小于 4 厘米 x 4 厘米 x 2 厘米)电磁永磁抓取器,能够承受 200N 的力,这意味着它可以安全地抓取约 15 公斤的货物。货物的抓取和释放是通过向电磁铁发送一个短脉冲,使其磁场反转来实现的。它能抓取的物体必须是金属的,或具有以下特征 方形薄钢靶 附属于它们。
该装置接受标准 PWM 伺服输入或 DroneCAN,使用 5V 电源。仅在第一次抓取或释放货物时的约 1 秒钟内需要大量电力。
实用链接¶
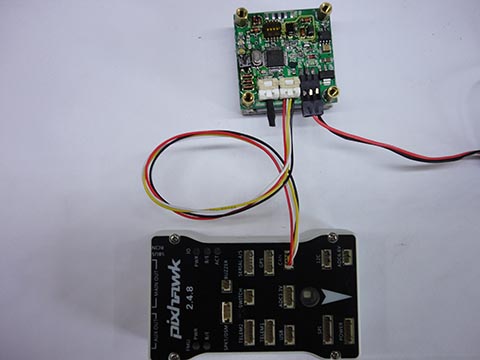
通过 DroneCAN 连接到 Pixhawk¶
备注
当 EPM 的电压降至 5V 以下时,EPM 将进入低功耗模式。降低开关速度,防止电源轨崩溃。
当 Vin 下降到 4.5V 以下时,绿色状态 LED 将快速闪烁,表明出现错误。
Pixhawk DroneCAN 连接器的电源轨电压为 5V。
建议使用外部电源为 EPM 供电(见上图)。
需要 EPM DroneCAN 电缆套件。 Clickmate -> DF13.
DroneCAN 需要端接,端接器包含在 DroneCAN 电缆套装中。
参数设置¶
您需要启用 DroneCAN。您需要启用 DroneCAN。 DroneCAN 设置页面在这里.您还可以检查以下参数的配置 GRIP_CAN_ID 和 GRIP_TYPE 来设置机械手 ID 和类型。
保存配置并重新启动电路板。大约 5 秒钟后,EPM 上的红色 CAN LED 开始闪烁。这表明正在接收 CAN 帧。
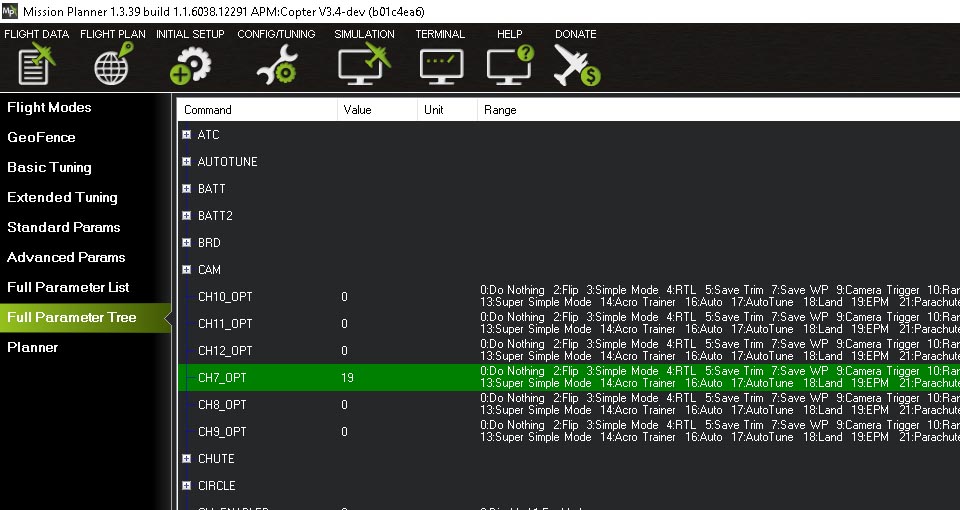
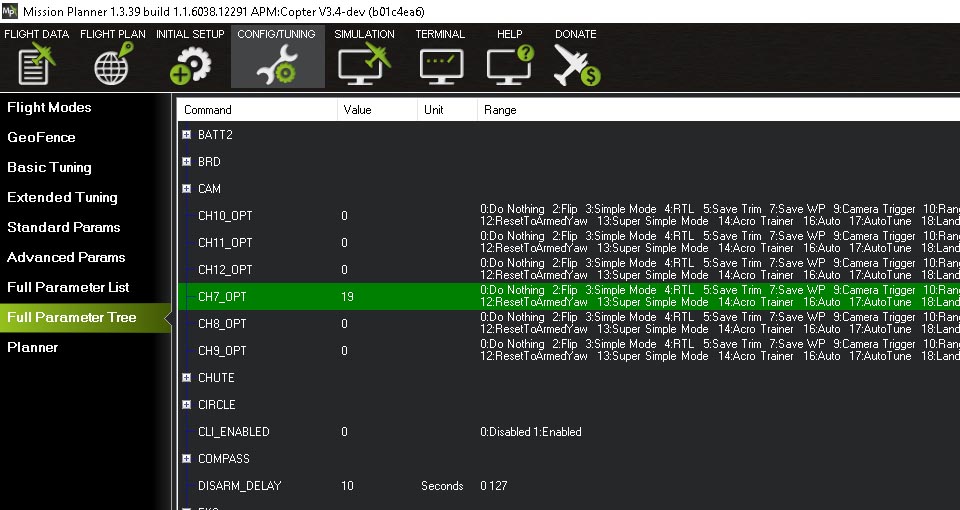
设置 CH7_OPT:通道 7 选项 = 19(EPM)(可能使用通道 7 - 12)
全部完成!可以通过通道 7 或自动任务或 MAVLink 命令控制 EPM。
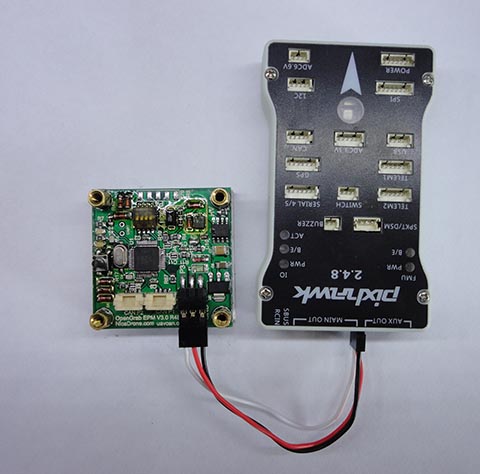
通过 PWM 接头连接 Pixhawk¶
将 EPM 与 Pixhawk 连接的方法与 伺服器.
参数设置¶
设置 CH7_OPT:通道 7 选项 = 19(EPM)(可能使用通道 7 - 12)。
全部完成。可通过通道 7 或自动任务或 MAVLink 命令控制 EPM。
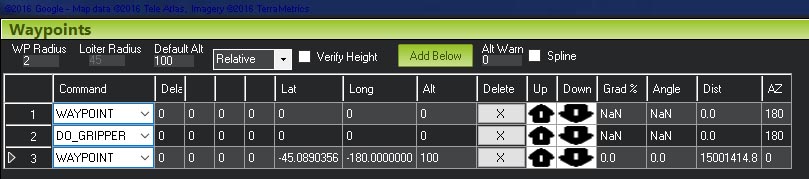
载具任务¶
添加一个 Do Gripper 指挥你的任务。
磁干扰和电路板电压检查¶
EPM 可能会产生磁干扰,特别是在抓取或释放货物时,或者在没有货物的情况下处于 "开启 "状态时。在 10 厘米的距离内磁场干扰很小
强烈建议在安装位置距离飞行计算机 10 厘米以内时测试 EPM 对罗盘的影响。
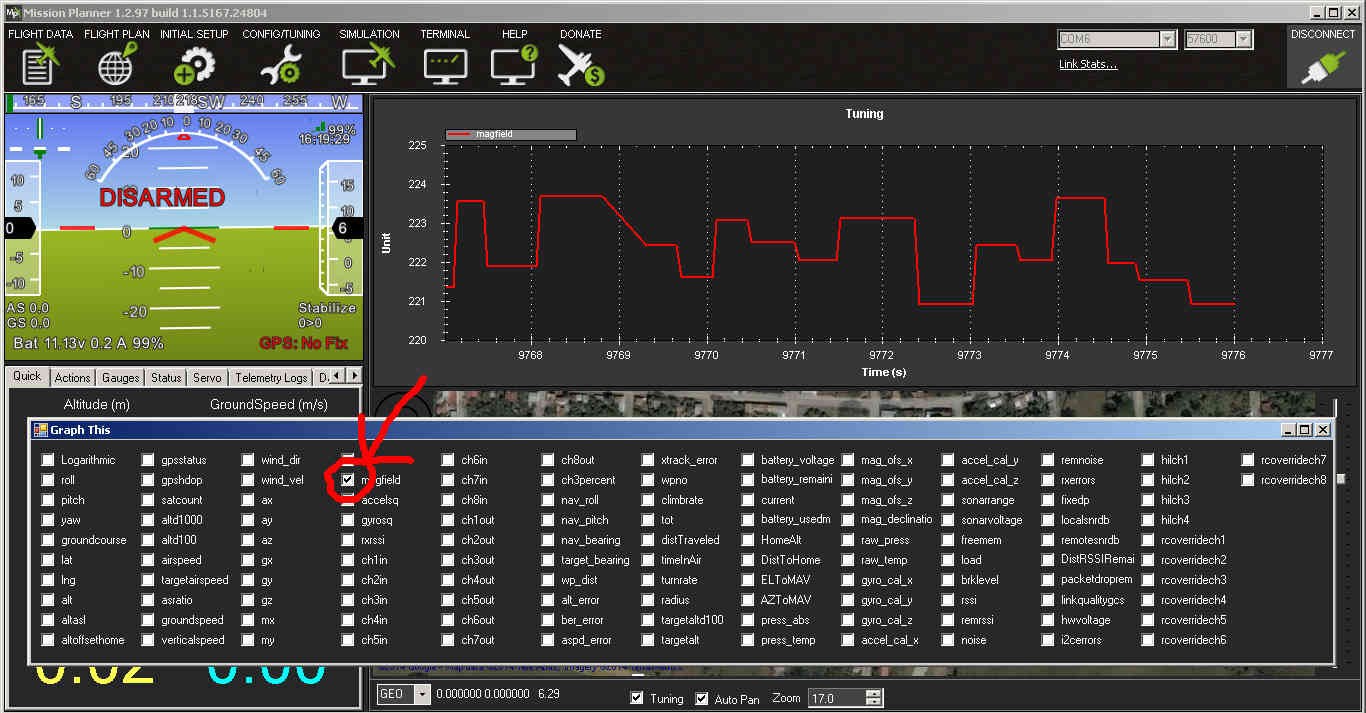
通过连接Mission Planner地面站,可以实时测试 EPM 对罗盘的影响。进入 "飞行数据 "屏幕,点击底部中间的 "调整 "复选框。双击右上方出现的图表,在出现 "Graph This(此图表)"窗口时选择 "magfield(磁场)"。
打开和关闭 EPM,确保磁场长度的变化不超过 10%。