Matek DroneCAN DLVR-10 空速传感器¶
Matek ASPD-DLVR 是一款带有 CAN/DroneCAN 或 I2C 接口的 DLVR-10 传感器。DLVR 空速传感器是 ArduPilot 目前支持的精度最高、温漂最小的传感器。它还可用于连接 GPS 和/或指南针,并将其作为 DroneCAN 外围设备呈现给(飞行)控制器。
特点¶
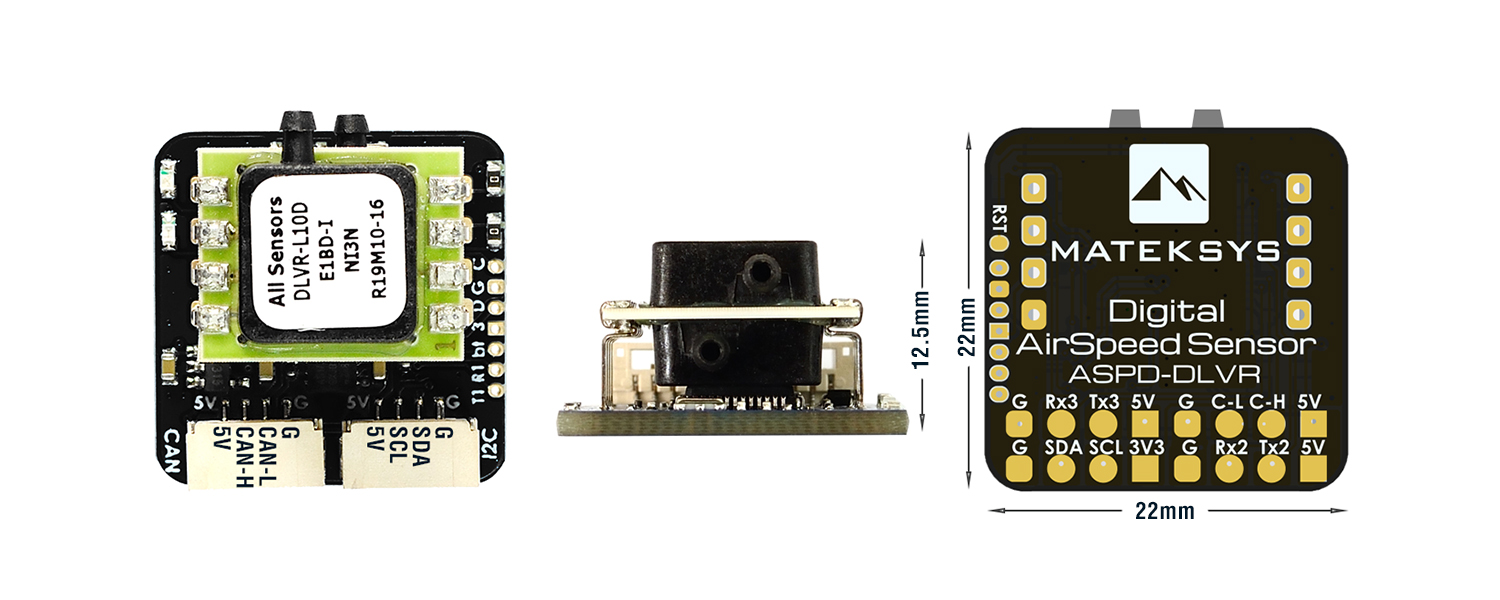
ArduPilot AP_Periph F303 CAN 节点
DLVR-L10D 空速传感器
- CAN 引导加载器 LED,蓝色
快速闪烁,CAN 节点与飞行控制器之间无通信
慢速闪烁,在 CAN 节点和飞行控制器之间进行通信
3.3V 电源 LED,红色
接口:
CAN JST-GH 连接器,DroneCAN 协议
I2C JST-GH 连接器,用于在 I2C 模式下连接 DLVR-L10D(I2C 地址 0x28)
用于 UART1 的焊盘,用于非 CAN 系统的固件更新
用于 UART2 的焊盘,可选用于外置 GPS
用于 UART3 的焊盘,未来可扩展用于 MSP 协议
用于 I2C 和 CAN 的焊盘,可选配指南针和 CAN 菊环链
规格
输入电压范围4~6V
耗电量60mA
工作温度:-20°C至85°C
压力范围: 2500Pa (± 10 inH2O)
爆破压力: 75kPa
速度范围:±250 公里/小时
尺寸:22 毫米 x 22 毫米 x 12.5 毫米
重量:4 克
连接器引脚¶
CAN 端口(可使用背面的焊盘从该设备菊花链连接其他 CAN 设备,见下图)
针脚 |
信号名称 |
电压/公差 |
|---|---|---|
1 |
VCC |
5V |
2 |
CAN_H |
CAN 总线 |
3 |
CAN_L |
CAN 总线 |
4 |
接地 |
- |
连接(飞行)控制器的 I2C 端口,用于替代 CAN(通过拆焊两个零欧姆电阻启用,见下图)。
备注
背面的焊盘 I2C 总线用于在未启用此端口时连接外部指南针,并将其作为 DroneCAN 指南针显示给(飞行)控制器。
针脚 |
信号名称 |
电压/公差 |
|---|---|---|
1 |
VCC |
5V |
2 |
I2C SDA |
3.3V/5V |
3 |
I2C SCL |
3.3V/5V |
4 |
接地 |
- |
UART3(未来的 MSP 端口)
针脚 |
信号名称 |
电压/公差 |
|---|---|---|
1 |
VCC |
5V |
2 |
TX(数据输出) |
3.3V/5V |
3 |
RX(数据输入) |
3.3V/5V |
4 |
接地 |
- |
UART2 (通过背面的焊盘)¶
可用于连接 GPS 并将其作为 DroneCAN 设备呈现给(飞行)控制器
UART1(通过背面的焊盘)¶
用于未来不使用 CAN/DroneCAN 的系统的固件升级
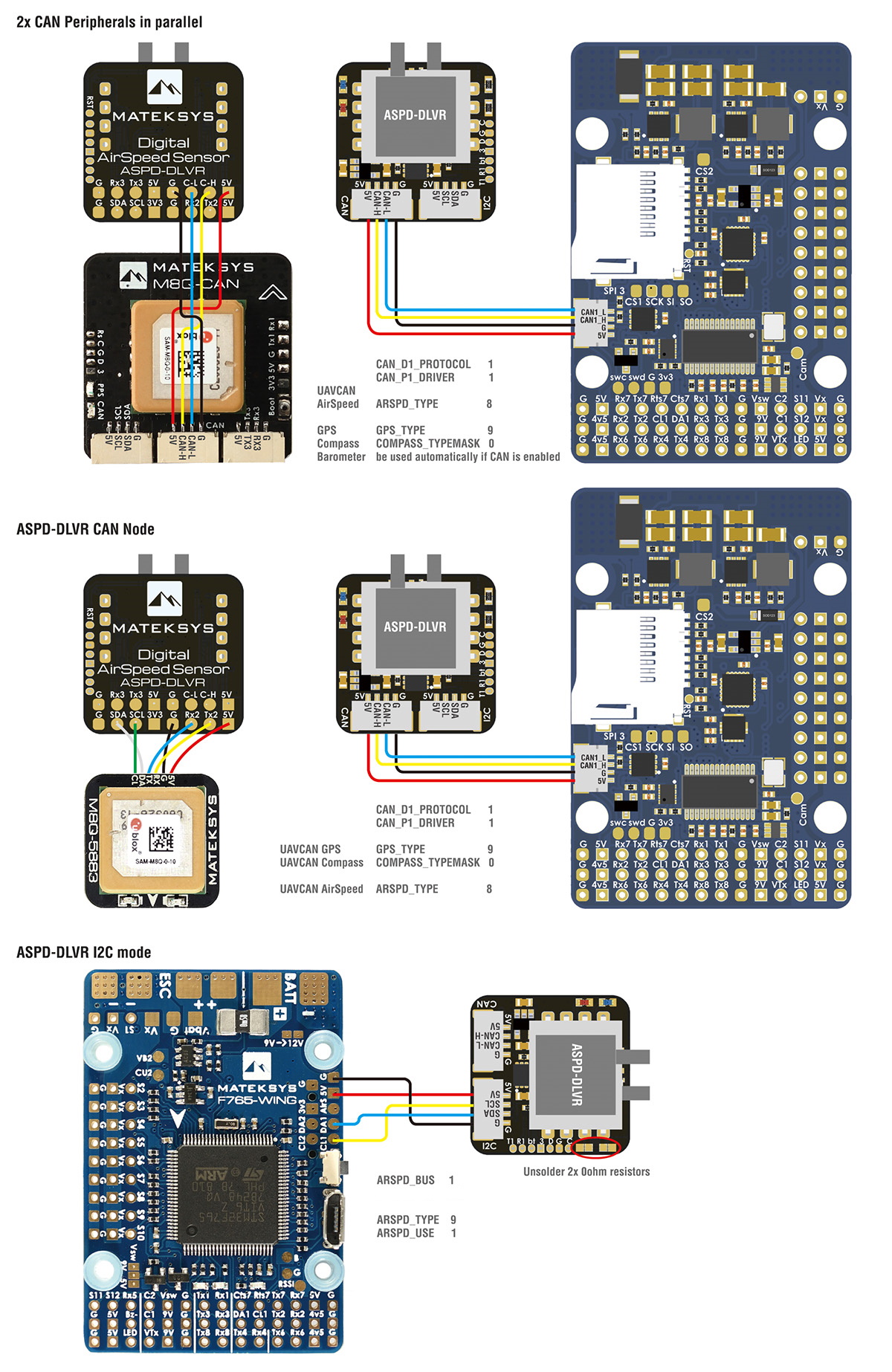
接线图¶
设置¶
DroneCAN 模式¶
通过地面站确认(飞行)控制器上设置了以下参数。
CAN_P1_DRIVER = 1(假设它位于(飞行)控制器的第一 CAN 总线上)
ARSPD_TYPE = 8 (DroneCAN)
如果可选 GPS 连接到 UART2,则设置
如果可选的外部指南针连接到后部 I2C 焊盘上,请确保 DroneCAN 指南针驱动程序未被禁用。(compass_disblmsk 不应设置第 9 位)。
I2C 模式¶
ARSPD_TYPE = 9 (DLVR-10)
ARSPD_USE = 1,启用在(飞行)控制器外部 I2C 总线上使用传感器
备注
如果(飞行)控制器有多条 I2C 总线或在外部显示其内部总线,则可能需要设置 ARSPD_BUS 为您在(飞行)控制器上连接的那个。
固件更新¶
固件将来可能会更新,以包括 MSP 连接选项。参见 这里 有关使用固件更新 UART1 焊盘的说明,或者如果使用 DroneCAN,请参阅说明 这里