Mission Planner地面站初始设置¶
Mission Planner地面站的这一部分由菜单项 设置 在Mission Planner地面站的顶部,有几个子部分。您可以在这些子部分中设置和配置(飞行)控制器,以便为特定飞行器做好准备。通常情况下,这些部分都是首次飞行前必须进行的 "必做 "操作。
进入本部分后,您将看到的内容取决于您是否已连接。每个菜单项都会出现一个新界面,下面将讨论每个菜单项,并提供更多详细链接。
安装固件¶
无论(飞行)控制器是否连接,您都可以看到该菜单项;但是,该菜单只有在断开连接时才有效。如果您有一个新的(飞行)控制器,或者您想更新(飞行)控制器中的控制软件,则必须安装(上载)"(飞行)控制器 "菜单。 固件 进入它。
固件位于 firmware.ardupilot.org.如果(飞行)控制器已安装 ArduPilot 固件,则可以使用此页面上传不同载具或版本的固件。请参见 加载固件 页。否则,首次安装 ArduPilot 时必须使用 Mission Planner 以外的其他方法,请参阅以下内容 部分.
在该屏幕上,您还可以选择 "所有选项",从而选择并加载固件的任何变体,或者选择 "加载自定义固件",这在开发人员加载试用代码时最常用。
安装传统固件¶
这是另一种加载旧版固件的方法。同样,仅在未连接时显示。
强制性硬件¶
只有在(飞行)控制器已连接的情况下,您才能看到此菜单项。单击该菜单项可查看在尝试操作飞行器之前必须设置的项目。具体内容请参阅 ArduPilot.org 文档,其中涵盖了您的特定飞行器(Copter、Plane、Rover、Blimp)。
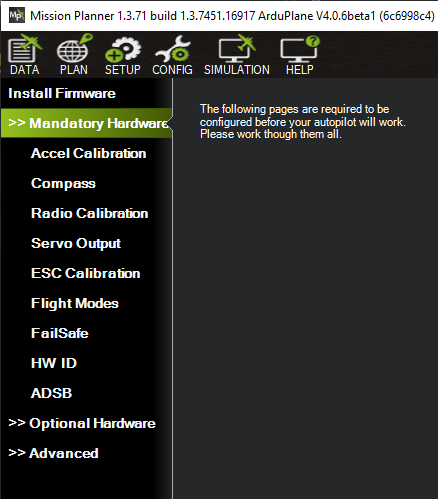
在操作载具之前,必须进行设置:
可选硬件¶
该子菜单允许对可选设备进行配置,其中许多设备可在Mission Planner地面站未连接时进行配置。可在此对 Sik 遥测无线电、UAVCAN 设置、PX4 光流传感器和天线跟踪器进行编程,还可以设置一个 操纵杆 与Mission Planner地面站结合使用。
连接后,可对电池监视器、集成 OSD、空速传感器和测距仪等外围设备进行配置。此外,该子菜单还具有电机测试功能,可以测试 Copter 和 QuadPlane 电机的方向和顺序。
DroneCAN/UAVCAN SLCAN¶
Mission Planner地面站中的 SLCAN 工具允许查看、配置和软件更新连接到(飞行)控制器 CAN 总线端口的 DroneCAN 节点。连接 DroneCAN 节点有两种方法:
直接使用 SLCAN
通过 MAVLink 使用 SLCAN
连接到 DroneCAN 节点¶
如果使用 SLCAN 直接连接方法,则必须首先配置(飞行)控制器参数。参见 基于 F4 (飞行)控制器的 SLCAN 访问 或 基于 F7/H7 (飞行)控制器的 SLCAN 接入功能 以获取设置信息。Mission Planner地面站应处于断开状态,并确保 SLCAN 端口显示为Mission Planner地面站右上角下拉框中的选定 COM 端口。
如果使用 MAVLink 方法,则无需进行任何设置,Mission Planner地面站应通过与(飞行)控制器的正常 MAVLink 连接处于连接状态。
在Mission Planner地面站中,导航至初始设置->可选硬件->DroneCAN/UAVCAN,如果使用直接 SLCAN 方法连接,请单击突出显示的红色按钮;如果通过 CAN 总线端口 1 或端口 2 进行 MAVLink 通信,请单击相应的绿色按钮,具体取决于节点连接的端口。

(飞行)控制器将使用 SLCAN 连接到Mission Planner地面站,窗口中将弹出已连接的 DroneCAN 节点。

如果节点只安装了引导加载程序,则需要上传固件。 维护 将会显示。点击更新固件。可以找到固件 这里 并为节点下载。

这时会弹出一个窗口。选择 "否",然后找到之前下载的节点固件并选择。
窗口将显示正在上传的固件,并弹出状态窗口。

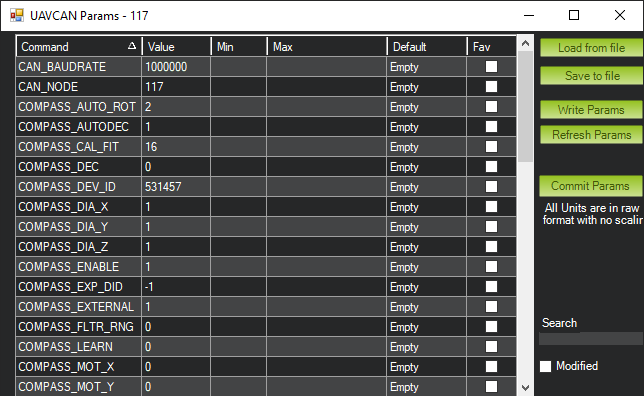
完成后,模式将变为 运行.按下 参数 按钮访问节点设置。从这里可以访问或更改 DroneCAN 设备参数。
点击 检查员 将打开一个弹出窗口,查看 CAN 总线上的报文。
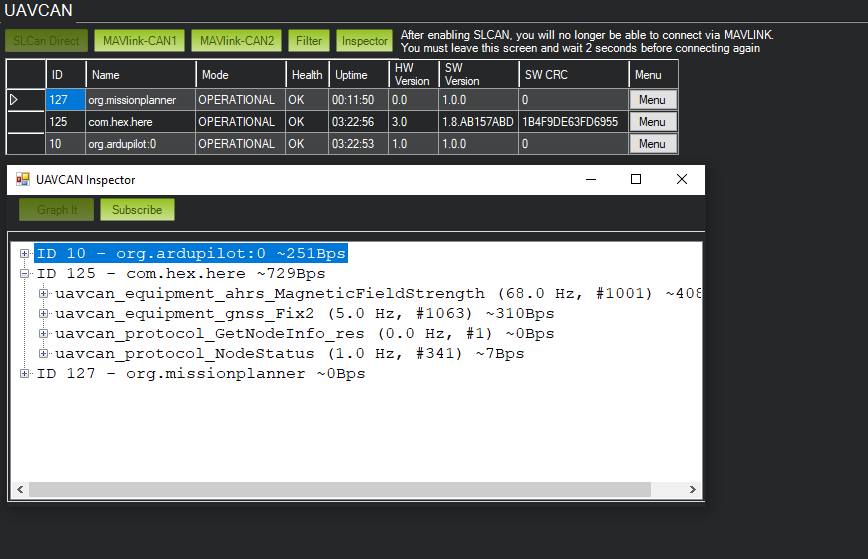
要返回正常的Mission Planner地面站操作,请切换到另一个选项卡,然后重新连接。重新连接前可能需要等待 2 秒钟。
高级¶
本节针对高级用户。
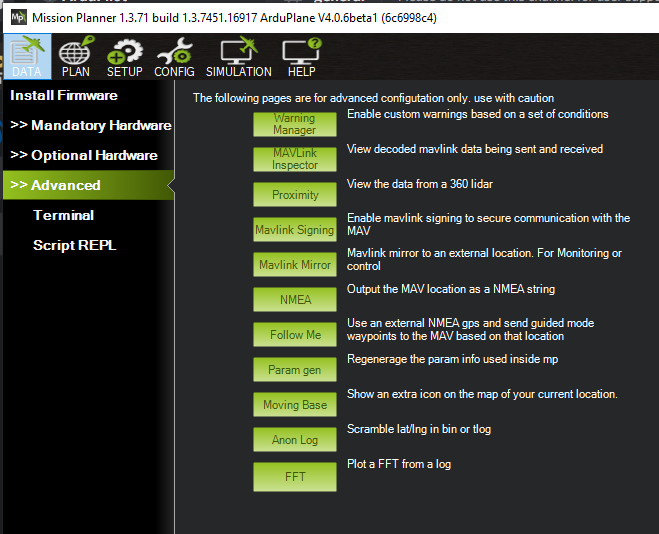
警告管理器:您可以根据状态项目的值创建自定义警告信息,显示在 HUD 和 DATA 屏幕的信息选项卡中。
MAVLink 检查器:可实时监控收到的各种 MAVLink 状态信息。
近距离:查看 360 激光雷达(如配备)的数据
Mavlink 签名:这可让您设置 安全通信 载具。
Mavlink 镜像:这允许您将 MAVLink 流量转发到另一个网络连接位置进行监控。另请参阅 MAVProxy 转发 另一种方法。
NMEA:通过网络或 COM 端口将载具位置以 NMEA GPS 字符串的形式输出
跟随我:如果使用 COM 端口上连接的 NEMA 模式 GPS 来确定 MP GPS 位置,则可以向载具发送导航模式航点,以跟踪 GCS。
参数生成重新生成Mission Planner地面站参数列表。如果未显示新固件参数,则偶尔需要使用。
移动基地:如果电脑连接了 NMEA GPS,则会在地图显示屏上显示正在移动的电脑位置。
匿名日志在共享日志文件时,允许您创建一个带有乱码位置的版本,以隐藏您的位置
FFT:从启用 IMU 批量采样的日志中绘制 FFT。参见 利用动态谐波带阻滤波器管理陀螺仪噪声 的使用示例。