SiK 无线电 - 高级配置¶
本文提供了 SiK 遥测无线电.它面向 "高级用户 "和希望更好地了解无线电如何运行的用户。
提示
大多数用户只需要了解《用户手册》中提供的基本指南和功能概述。 SiK 电台 v2.

监控链接质量¶
如果地面站支持 MAVLink,您可以使用 SiK 对讲机中的 MAVLink 支持功能在飞行时监控链路质量。
两个关键的信息参数是 RADIO.rssi 和 RADIO.remrssi.第一个参数是本地无线电接收的 RSSI(信号强度)级别。remrssi 参数是远程无线电接收到的 RSSI。
下面是我在当地飞行场飞行时 RSSI 水平的典型示意图。
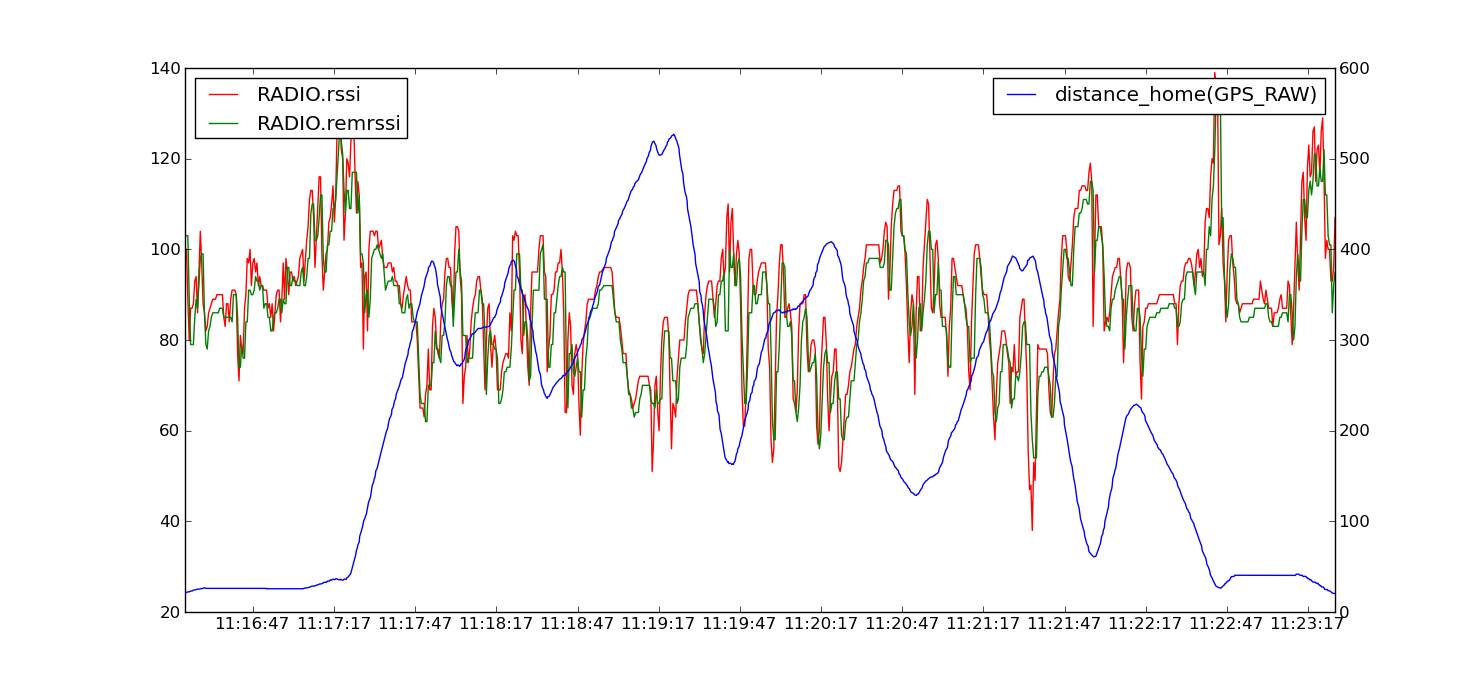
RSSI 值的比例约为 1.9x dBm 信号强度加上一个偏移量。有关 RSSI 和接收信号强度 dBm 之间的精确映射,请参阅 Si1000 数据表,或使用以下近似公式
signal_dBm = (RSSI / 1.9) - 127
备注
这次飞行中 RSSI 变化如此之大的原因是,由于我在飞机上使用的是简单的有线天线,当飞机转弯时信号会衰减。这次飞行的 RSSI 值足够高,在使用默认无线电参数的情况下,整个飞行过程中的链路质量都非常好。
诊断范围问题¶
如果从上述信息中得到的范围小于您的预期,那么您需要做的就是绘制一次飞行的噪声和信号电平图,以找出问题所在。
范围问题最常见的来源是噪音。噪声是在无线电使用的相同频率范围内产生的不必要的无线电辐射,会干扰无线电的工作。无线电内置遥测记录功能,可帮助您诊断噪声源。
有三种主要类型的噪声可能会影响无线电:
飞机电子设备(如发动机、电调、(飞行)控制器等)产生的噪音
地面站电脑,尤其是 USB 总线发出的噪音
附近其他人操作与您的无线电频率相同的无线电所产生的噪音
要确定噪音类型,请打开Mission Planner地面站,选择 "遥测日志 "选项卡。然后选择 Tlog> Kml 或图表.窗口弹出后,选择 图形日志 并选择使用无线电进行试飞的日志。等待日志加载,然后选择以下项目进行记录:
rssi
remrssi
噪音
remnoise
将所有 4 个值放在一张图上。最终会得到这样的图表:
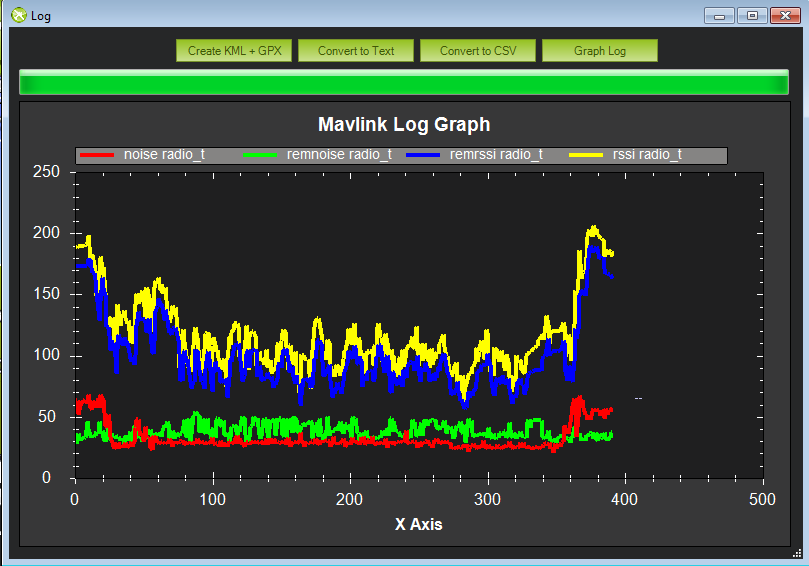
这张图说明了 4 个问题:
地面接收到的信号量
飞机接收到的信号量
地面接收到的噪音量
飞机接收到的噪音量
为了获得最佳的通话距离,您希望两条噪声线都较低,而两条信号线都较高。在上图(取自我的 SkyFun 和一对 3DR 433 无线电设备)中,您可以看到飞机上的噪音水平高于地面上的噪音水平。另外请注意,在飞行开始时(在我启动发动机之前),飞机上的噪音水平较低,而在我启动发动机之后,噪音水平有所上升。这说明我的发动机产生了一些噪音。如果我想获得更大的航程,就需要将无线电进一步远离马达和电调。
3DR-433 最常见的噪声源可能是地面站 USB 总线产生的噪声。这表现为 RADIO.noise 值偏高。如果出现这种情况,可以尝试使用不同的 USB 电缆或不同的笔记本电脑。您也可以尝试在笔记本电脑和无线电之间使用 USB 集线器。
如果 "rssi "和 "噪音 "在图表上相等,那么就会失去链接。要确定您的范围,一个粗略的经验法则是减去 "rssi "和 "噪音 "的数字,然后除以 2。衰减余量每增加 6 分贝,音量范围就会增加一倍。因此,如果您有 18 分贝的衰减余量,那么无论您测量余量时的音量是多少,您的音量大约都能达到 8 倍。
天线位置是造成距离问题的另一个关键因素。地面站天线应远离障碍物,离地几米远。您可能需要搭建一个支架来固定天线,以获得最佳的覆盖范围。
串行和空运费率 "单字节形式¶
"这款" SERIAL_SPEED 和 气流 参数的形式与 ArduPilot 对 SERIAL3_SPEED 参数。如果数字大于 2000,它就是波特率。否则,它就是以 kbps 为单位的波特率,截断为整数。因此,"9 "表示 9600 波特,"38 "表示 38400,"115 "表示 115200 等。
选择空中数据传输速率¶
控制无线电通话距离的关键参数是
气流.默认设置为 64(即 64kbps),使用小型全向天线的传输距离可达一公里以上。设置的
气流 范围越远,虽然降低 气流
也会降低可通过链路发送的数据量。
无线电固件只能支持 13 种可能的空中数据速率,即 2、4、8、16、19、24、32、48、64、96、128、192 和 250。如果您的应用出于某种原因需要不同的空气数据率,我们可以将其添加到寄存器表中。如果您选择了一个不支持的空气流量,那么将从支持的列表中选择下一个最高流量。
选择何种空中数据传输速率取决于以下因素:
您需要的范围
您将发送的数据速率
无论您是主要向一个方向发送,还是向两个方向发送
是否启用了 ECC
对于大多数遥测应用而言,您主要是单向发送数据,即从飞机向地面站发送数据。对于大多数人来说,从地面站发送到飞机的数据量很小,只是偶尔发送一个控制数据包和心跳数据包。
如果您使用操纵杆控制飞机,那么您将从地面站向飞机发送更多的数据。 气流 尽管您的航程会缩短。
"这款" ECC 参数对在给定条件下可支持的数据传输速率有很大影响。 气流.如果 ECC 设置为零,则不会发送纠错信息,无线电使用简单的 16 位 CRC 来检测传输错误。在这种情况下,无线电可以支持单向约 90% 的数据传输。
气流.
如果启用 ECC,可支持的数据传输速率将减半。ECC 系统会将无线电发送的数据量增加一倍。不过,这样做是值得的,因为误码率会大幅下降,而且在更远的距离上也能获得更可靠的链路。
通过使用无线电固件注入 MAVLink 流的 MAVLink RADIO 数据包,ArduPilot 将自动调整其遥测速率,以适应无线电的处理能力。这样您就可以通过设置一个 SERIAL_SPEED 大于无线电设备的实际处理能力。
选择空中数据传输速率的另一个因素是 TDM "同步时间"。两台无线电设备需要相互确定跳频模式。它们通过缓慢改变接收信道,同时快速改变发射信道来做到这一点。在空中数据传输速率较高时,与另一台无线电同步的过程只需几秒钟,但在空中数据传输速率较低时,这个过程就会变慢。
对于大多数业余无人飞行器应用,默认情况下 气流 在不启用 ECC 的情况下,64 分辨率也不错。
纠错¶
警告
由于范围缩小,而且一些较新的无线电芯片不具备 ECC 功能,如果选择此选项,将无法正常工作,因此不再建议使用纠错功能。
如上所述,如果将 ECC 参数设置为 1,无线电支持 12/24 戈莱纠错码。这意味着无线电每发送 12 比特数据将发送 24 比特,使用戈莱码查找表计算比特。这个过程在接收端是相反的,无线电可以纠正每 12 比特数据中最多 3 比特的误码(即 25% 的误码率)。
ECC 选项的缺点是可用数据带宽减半。在某些情况下这是值得的,因为您可以在更远的距离上保持可靠的链接。此外,串行数据流中的 "噪音 "也会大大减少。
MAVLink 框架¶
如果将 MAVLINK 选项设置为 1 或 2,则无线电将执行 "MAVLink 成帧"。ArduPilot 使用 MAVLink 协议向地面站传输遥测数据。使用 MAVLink 成帧时,无线电将尝试使无线电数据包与 MAVLink 数据包边界保持一致。这意味着如果数据包丢失,接收器不会看到半个 MAVLink 数据包。这部分数据包会在地面站控制台上显示为线路噪声。
如果将 MAVLINK 设置为 2,那么除了进行 MAVLink 成帧外,无线电还将查找 RC_OVERRIDE 数据包(用于操纵杆),并确保尽快发送这些数据包。如果使用基于平板电脑的操纵杆进行控制,该选项将非常有用。
无线电固件会尽可能将多个 MAVLink 数据包合并到一个无线电数据包中,以达到最高效率。无线电数据包的最大大小为 252 字节。
无线电固件支持 MAVLink 1.0 和 MAVLink 2.0 传输格式。
MAVLink 报告¶
如果将 MAVLINK 设置为 1,则无线电固件还将查找来自串行连接的 MAVLink HEARTBEAT 信息。如果看到 HEARTBEAT 信息,它就会知道 MAVLink 协议正在使用,并开始向串行数据流注入 MAVLink "RADIO "状态数据包。
无线电数据包包含链路两端 RSSI(接收信号强度指示器)水平的信息,以便地面站或飞机在链路质量过低时采取行动。
RADIO 数据包还包含错误率信息,以及串行传输缓冲区的满载情况(百分比)。ArduPilot 可以利用这些信息自动调整遥测数据流速率,使其符合无线电所能承受的数据速率。
功率等级¶
您需要非常小心地配置无线电设备,使其不超出所在国家的法定功率限制。美国和澳大利亚的默认功率水平为 20dBm,因为在 915-928MHz 频段,当地的 LIPD 类许可证允许跳频无线电的功率高达 30dBm。因此,只要天线增益小于 10dBi,就符合 ISM 规定。
无线电不能支持任意功率级别。它只能支持下表中给出的功率级别
| 功率(dBm) | 功率(毫瓦) |
|---|---|
| 1 | 1.3 |
| 2 | 1.6 |
| 5 | 3.2 |
| 8 | 6.3 |
| 11 | 12.5 |
| 14 | 25 |
| 17 | 50 |
| 20 | 100 |
如果选择了不支持的功率级别,无线电将从上表中选择下一个最高功率级别。
请仔细检查您所在国家的 EIRP(等效同向辐射功率)功率限制,确保考虑到天线增益。该无线电是 "DIY "无线电部件,确保其使用符合当地规定是您的全部责任。
例如,如果您当地的规定允许最大 30dBm (1W) EIRP,那么如果您使用发射增益为 12dB 的放大器和增益为 3dBi 的天线,则最多需要将 TXPOWER 设置为 14。
如果您不知道如何计算,我们在这里为您提供了教程: 了解 dB、瓦特和 dBm.
使用 AT 命令集¶
无线电支持海斯 "AT "调制解调器命令集的一种变体进行配置。
如果使用串行控制台以当前串行波特率连接无线电,则可以通过输入序列 "+++"告诉无线电进入 AT 命令模式。为防止数据被视为命令序列,需要一定的保护时间,因此请确保在输入序列前后的 1 秒钟内没有在串行链路上输入任何内容。
进入 AT 命令模式后,无线电将发出 "OK "提示,并停止显示其他无线电发送的数据。
进入 AT 命令模式后,您可以向无线电发出 "AT "命令来控制本地无线电,或者(如果成功连接)使用 "RT "命令来控制远程无线电。
可用的 AT 命令有
ATI - 广播节目版
ATI2 - 显示电路板类型
ATI3 - 显示电路板频率
ATI4 - 显示电路板版本
ATI5 - 显示所有用户可设置的 EEPROM 参数
ATI6 - 显示 TDM 计时报告
ATI7 - 显示 RSSI 信号报告
ATO - 退出 AT 命令模式
ATSn?- 显示无线电参数编号 'n'
ATSn=X - 将无线电参数编号 "n "设置为 "X
ATZ - 重新启动无线电
AT&W - 将当前参数写入 EEPROM
AT&F - 将所有参数重置为出厂默认设置
AT&T=RSSI - 启用 RSSI 调试报告
AT&T=TDM - 启用 TDM 调试报告
AT&T - 禁用调试报告
将 "AT "替换为 "RT "后,除 ATO 外,所有这些命令都可在已连接的远程无线电上使用。
也许最有用的命令是 "ATI5",它可以显示所有用户可设置的 EEPROM 参数。它将生成如下报告
S0: 格式=22
S1: SERIAL_SPEED=57
S2: 气流=64
S3: NETID=25
S4: TXPOWER=20
S5: ECC=1
S6: MAVLINK=1
S7: 支持=1
S8: MIN_FREQ=915000
S9: MAX_FREQ=928000
S10: NUM_CHANNELS=50
S11: 任务周期=100
S12: LBT_RSSI=0
S13: 曼彻斯特=0
S14: RTSCTS=0
S15: MAX_WINDOW=131
第一列是要更改参数时要设置的 S 寄存器。例如,要将发射功率设置为 10dBm,请使用 "ATS4=10"。
大多数参数只有在下次重启时才会生效。因此,通常的做法是设置所需的参数,然后使用 "AT&W "将参数写入 EEPROM,再使用 "ATZ "重新启动。发射功率是个例外,它会立即发生变化(不过除非使用 AT&W,否则重启时会恢复到旧的设置)。
该参数的含义如下:
格式- 这是 EEPROM 格式版本。请勿更改SERIAL_SPEED- 这是 "单字节形式 "的串行速度(见下文)。气流- 这是 "单字节形式 "的空中数据传输速率NETID- 这是网络 ID。两个无线电设备的网络 ID 必须相同TXPOWER- 这是发射功率,单位为 dBm。最大为 20dBmECC- 启用/禁用戈莱纠错码MAVLINK- 控制 MAVLink 成帧和报告。0=无 MAVLink 成帧,1=帧 MAVlink,2=低延迟 MAVlinkMIN_FREQ- 最小频率(千赫MAX_FREQ- 最大频率(千赫NUM_CHANNELS- 跳频通道数任务周期- 允许传输的时间百分比LBT_RSSI- 先听后说阈值(见下文文档)MAX_WINDOW- 最大发送窗口(以毫秒为单位),默认为 131,建议使用 33 以减少延迟(但降低带宽)。
两个无线电设备要进行通信,链路两端的下列条件必须相同:
无线电固件版本
AIR_SPEED
MIN_FREQ
的 MAX_FREQ
的 NUM_CHANNELS
NETID
ECC 设置
LBT_RSSI 设置
MAX_WINDOW 设置
链接两端的其他设置可能会有所不同,不过通常两端的设置会相同。
可用频率范围¶
下表可以帮助您将当地的无线电法规与两种无线电型号进行比对
| 无线电 | 最低频率(兆赫) | 最大频率(兆赫) |
|---|---|---|
| 433 | 414.0 | 454.0 |
| 900 | 895.0 | 935.0 |
DUTY_CYCLE 设置¶
大多数用户都希望设置 任务周期 到 100。括号
任务周期 是无线电发送数据包的最大时间百分比。
之所以包含占空比,是因为如果占空比低于给定的阈值,世界上有些地区允许更高的发射功率或更多的频率。例如,在欧洲,如果占空比低于 10%,就可以在 433 频段中发射更多频率。
如果将占空比设置为低于 100%,可用带宽就会减少,因此只有在波特率较高时才能很好地进行遥测。在占空比为 10%的情况下,从 ArduPilot 获取良好的遥测数据仍然非常实用,因为遥测流量非常 "突发",所以平均发送时间通常不会很长。
例如,您可以轻松地以 2Hz 的频率接收所有遥测数据流。
气流 设置为 128,启用 ECC 和 任务周期 设置为 10。
您还可以通过设置 任务周期
为 0。 NUM_CHANNELS 否则时钟同步性会很差。
低延迟模式¶
无线电可配置为使用 "低延迟模式",以提高基于平板电脑的操纵杆等的性能......启用该模式应设置以下两个参数:
设置
MAVLINK为 2。RC_OVERRIDE的数据包,让这些数据包总是先发送。如果您正在使用 MAVLink(您可能正在使用),选择此设置没有任何坏处。改变
MAX_WINDOW从默认值 131 改为 33。这将确保 GCS 至少每 33 毫秒向载具发送一次数据包。值得注意的是,这会降低可用带宽,因此如果需要绝对最大带宽,最好使用默认值 131。 通道上的两个无线电设备必须具有相同的参数值,否则将无法相互通话。
先听后说 (LBT)¶
无线电可执行 "先监听后通话"(LBT)功能,以符合更广泛的地区监管要求。LBT 是一种系统,在该系统中,无线电需要监听一段时间,在没有其他无线电信号的情况下才允许发射。通过使用非零 LBT_RSSI 您的无线电会变得更有 "礼貌",等到其他人都停止发射后,自己才开始发射。
要在无线电中启用 LBT,您需要设置 LBT_RSSI 阈值。这是无线电认为表明信道繁忙的信号强度。如果设置 LBT_RSSI 为零,则禁用 LBT。
最小非零设置为 25,比无线电接收灵敏度(-121 dBm)高几个 dB。设置 LBT_RSSI 您需要了解当地无线电法规对 LBT 功能要求的信号电平。LBT_RSSI 在 25 以上的每一个增量大致等于无线电接收灵敏度的 0.5dB。因此,如果您将 LBT_RSSI 设置为 40,那么如果信号强度低于接收机灵敏度 7.5dB,无线电就会认为信道是空闲的。
或者,您也可以使用此公式获得以 dBm 为单位的接收信号强度:
signal_dBm = (RSSI / 1.9) - 127
此公式为近似值,但相当接近。有关更精确的图表,请参阅 Si1000 数据表。
您需要查阅当地的监管要求,以了解
LBT_RSSI 您应该使用的设置。
根据欧洲 9.2.2.2 规则,无线电中的 LBT 执行使用最少 5ms 的监听时间和随机监听时间。
请注意,在许多地区,您需要结合 AFA(自适应频率灵活性)实施 LBT。只要具备以下条件,无线电就能实现 AFA NUM_CHANNELS 设置为 1 以上。
升级无线电固件¶
无线电的固件是 开放源代码有时还会增加新功能。
最简单的升级方法是
使用微型 USB 电缆将要升级的无线电连接到电脑上
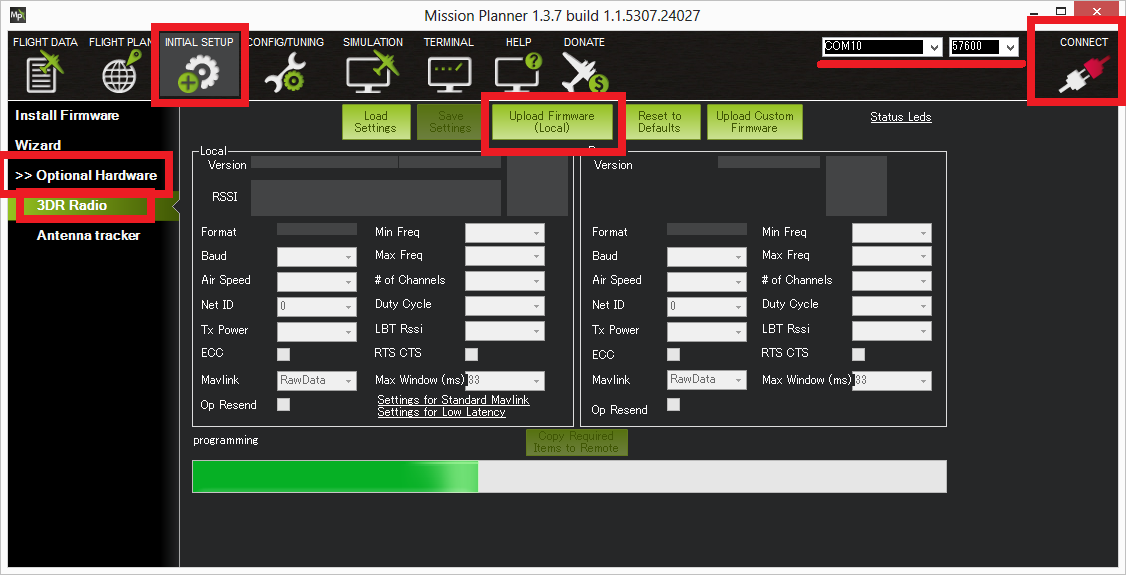
打开Mission Planner地面站,转到 初始设置 | 可选硬件 | SiK 无线电设备 page.
选择正确的 COM 端口,并将波特率设置为 57600。确保 "连接 "按钮处于断开状态,如下图所示。
按下 上传固件(本地) 按下 "编程 "按钮,稍作延迟后,"编程 "信息将出现,绿条将从左到右缓慢增加。
两个无线电都应执行上述过程。
备注
新的固件更新有时会修改某些设置,因此最好比较一下更新前后的设置,看看是否有变化。
使用 FTDI 转 USB 电缆配置 SiK 无线电设备¶
配置 3D Radios 的推荐方法是使用Mission Planner地面站、 在此讨论.
如果这种方法不奏效,请采取以下措施:
连接所有设备并配置地面无线电:
用 FTDI 转 USB 电缆将空中无线电连接到计算机 USB 端口 & 注意 Com 端口 #
使用 Windows | 设备管理器 | 端口 以识别 COM 端口 #
当绿色 LED 指示灯闪烁时,您就可以知道 FTDI 电缆在无线射频上的方向是否正确。
将地面无线电连接到个人电脑的 USB 端口;注意 COM 端口 # 在 MP 飞行数据选项卡右上方,将波特率设为 57600;选择地面无线电 COM 端口 #
在 MP 飞行中,按 Ctrl + A 打开无线电配置窗口。点击 加载设置 (从地面无线电)
在Mission Planner地面站无线电配置窗口中,(MP)选中 高级选项 箱
如果加载的值与上述推荐设置不一致,请进行修改,然后点击 节省
配置空中无线电:
在右上角的 MP 中,选择 气 无线电的 COM 端口
在 MP 无线电配置窗口中,单击 加载设置 (摘自 气 无线电)
编辑空中无线电的设置(包括高级选项),使其符合以下条件 正是 然后点击 保存设置 (对空广播)
您可能无法在 "格式 "字段中添加数值,没关系。
在 MP 中,按 配置 SiK 无线电设备 并输入完全相同的设置,包括高级设置;点击 保存设置.
等待两个无线电设备连接(绿色 LED 指示灯亮起)
如果上述方法无效,请更新固件:
点击 更新固件 依次连接每台无线电设备。然后重复上述步骤。
验证无线遥测:
从(飞行)控制器上拔下 FTDI 转 USB 电缆
将空中无线电连接到(飞行)控制器 & LIPO
在 MP 飞行数据 选项卡,选择地面无线电 COM 端口,然后点击 连接
备注
请记住,当您通过特定 COM 端口与无线电进行物理连接时,您不能使用 "将所需项目复制到远程 "按钮(在使用无线连接之前没有远程)。
本部分内容由文档用户组 (DUG) 提供.
强制启动加载程序模式¶
如果您设法使无线电处于无法通过Mission Planner地面站上传新固件的状态,那么您可能需要强制无线电进入引导加载器模式。
固件上传的正常工作方式是,规划员连接无线电并发送 AT&UPDATE 命令,使无线电进入引导加载器模式,准备接收新固件。这只有在计划员可以向无线电发送 AT 命令时才能起作用。
如果无法发送 AT 命令,则可以在开机时通过短接无线电上的 CTS 和 GROUND 引脚来强制启动加载器模式。进入引导加载器模式后,红色 LED 灯会亮起。
空中无线电的 CTS 和 GROUND 引脚很容易找到,因为它们标在无线电的背面(它们是 FTDI 连接器的两个引脚)。在 USB 无线电设备上就不那么明显了,所以这个图表可能会有所帮助:
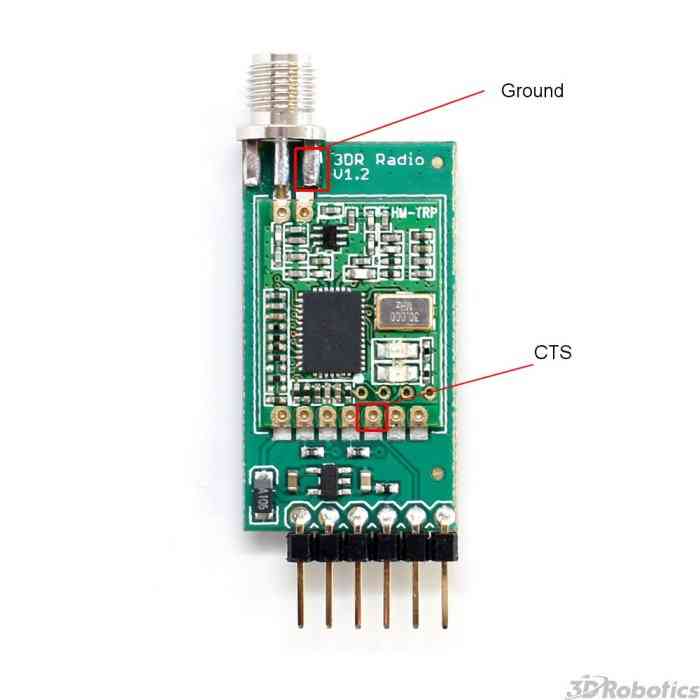
无线电进入引导加载器模式后,就可以上传固件了。
技术细节¶
在评估该收音机是否符合当地法规时,了解其使用的技术可能会有所帮助。
固件采用同步自适应时分复用(TDM)技术实现跳频扩频(FHSS)。
具体来说,无线电将 MIN_FREQ+delta 和 MAX_FREQ-delta 之间的频率范围划分为 NUM_CHANNELS 通道。delta "值是一个保护范围,以确保我们远离允许频带的边缘。保护范围设置为半个通道宽度。通道宽度定义为
频道宽度 = (MAX_FREQ - MIN_FREQ) / (NUM_CHANNELS+2)
此外,无线电还可使用基于以下标准的随机种子,将基频偏移最多一个信道 NETID.这意味着使用不同 NETID 数字使用的频率略有不同。
无线电使用 GFSK(高斯频移键控)在特定频率上进行传输。
TDM 的工作原理是根据 16 微秒刻度的倍数将时间分成若干个片段。时间切分的目的是使任何频率的最长停留时间为 0.4 秒(这符合美国的规定)。TDM 算法的工作原理如下:
EEPROM 参数决定了一组 TDM 参数,特别是发送窗口和静音周期,两者都以 16 微秒为单位。您可以使用 ATI6 查看结果。
传输窗口按比例调整,以便传输 3 个全尺寸数据包
对于给定的数据速率,静默期等于数据包延迟的两倍
两个无线电设备通过在所有数据包中添加 13 比特的时间戳信息来自动同步时钟。时间戳以 16 微秒为单位。
每台无线电设备只有在 "轮到自己 "时才会发射信号。因此,一台无线电会有一个发射窗口的时间,然后会有一段静默期,此时两台无线电都不发射,然后轮到另一台无线电。我们从未遇到过两台无线电同时发射的情况
发射信道的随机序列是基于
NETID在每个完整的 TDM 轮次中,频率会在静音期间两次切换到下一个信道
不传输数据时,通过串行端口输入的数据在 2048 字节缓冲器中缓冲
为防止缓冲区获得过多数据(增加延迟并有溢出风险),无线电设备会向连接设备发送缓冲区已满的信息。ArduPilot 会调整少量遥测速率,以保持合理的缓冲数据量。
TDM 算法也是自适应的,也就是说,当轮到无线电 A 发送信息时,它可以向无线电 B 发送一个小标记,表示 "我现在不需要发送任何信息,你可以使用我剩余的时间片"。这就是链路自动平衡非对称负载的方式
在最初搜索另一部无线电设备时,以及在失去链路的任何时候,无线电设备都会进入一种模式,即接收频率移动非常缓慢,但发射频率以正常速率移动。这样,两台无线电设备就能找到对方,实现初始时钟同步。这需要多长时间取决于信道数、空中数据速率和数据包丢失率。
在某些地区,您可能需要了解每个信道内辐射能量的分布情况。这取决于多种因素,但主要是 GFSK 调制所使用的频率偏差。下面的公式可以估算出频率偏差:
频率偏差 = 空气数据速率 * 1.2 分钟 频率 偏差 = 40 最大 频率 偏差 = 159
其中,频率偏差以千赫为单位,空气数据速率以千位/秒为单位。