QRTL 模式¶
QRTL 模式(QuadPlane Return To Launch 模式)可将 QuadPlane 从当前位置导航至原点上方悬停,然后着陆。QRTL 模式的行为可由几个可调参数控制。本页将介绍如何使用和自定义 QRTL 模式。
概述¶
选择 QRTL 模式后,QuadPlane 将返回原点。默认情况下,它将过渡到固定翼模式(如果在进入前处于 VTOL 模式,它将爬升至 Q_RTL_ALT 如果低于该高度,则在过渡之前),执行正常 RTL 的第一部分,然后在接近着陆点时进场,切换到 VTOL 模式并前往着陆点,然后下降着陆。参见 混合 RTL 部分用于 Q_RTL_MODE = 3.
如果需要纯粹的 VTOL QRTL,则必须禁用固定翼 RTL 和进场功能,方法是设置 Q_OPTIONS 位 16。然后,QRTL 将执行以下操作:
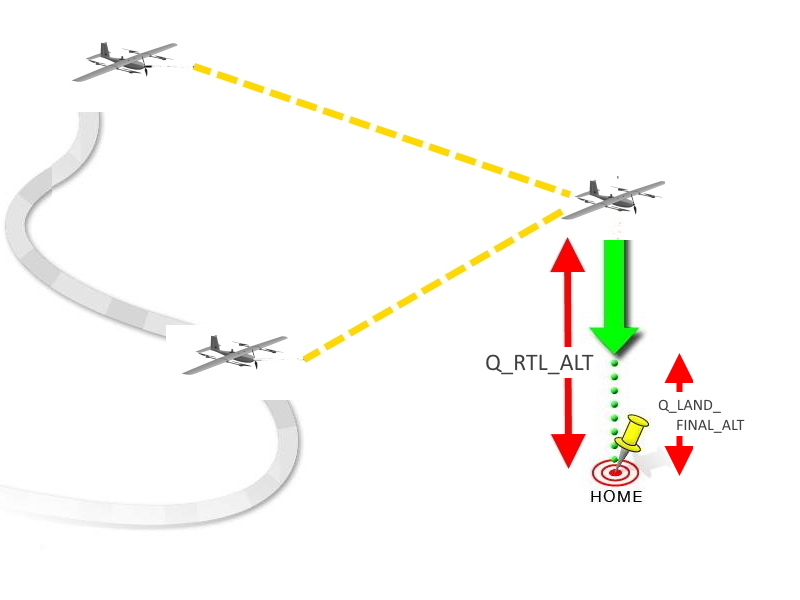
QuadPlane 会立即导航到位于 Q_WP_SPEED向 Q_RTL_ALT 高度一旦到达 Q_WP_RADIUS 时开始下降。 Q_WP_SPEED_DN 速率,直到达到 q_land_final_alt 然后以 q_land_final_spd 直到着陆。
备注
如果电机处于最小值,但其高度在一秒钟内的变化不超过 0.2 米,QuadPlane 将识别为已着陆。它不会使用高度本身来决定是否关闭发动机,除非 QuadPlane 的高度也必须低于 0.2 米。 q_land_final_alt 即在 LAND FINAL 阶段)。如果 EKF 确定的高度噪声过大,可以通过增加 Q_LAND_ALTCHG 默认值 0.2 米。
或者,您可以 配置飞机返回集结点而不是家庭所在地。
警告
"原点 "位置应该是飞机的实际 GPS 起飞位置:
为了使 QRTL、QLOITER、AUTO 或任何依赖 GPS 的模式正常工作,在上膛前获取 GPS 锁定非常重要。默认上膛检查中提供了这一要求。强烈建议不要禁用此检查。
对于 QuadPlane,原点位置最初是在飞机获得 GPS 锁定时建立的。然后,只要自动驾驶解除,就会不断更新。
这意味着,如果您在 QuadPlane 中执行 QRTL,它将返回到上膛时的位置,前提是它已获得 GPS 锁定。
考虑使用 集结点 以避免直接返回 QRTL 上的上膛点
警告
在 QRTL 模式下,(飞行)控制器使用测量气压的气压计作为确定高度的主要手段("压力高度"),如果飞行区域内的气压发生变化,旋翼飞行器将跟随气压变化而不是实际高度变化。
说明¶
着陆并重新上膛 QuadPlane 后会重置原点,这是在机场飞行时的一大特色。
如果您在飞行过程中第一次被锁定,您的家将被设置在锁定的位置。