QuadPlane 概览¶

QuadPlane 是一种固定翼和多旋翼飞机的组合。这种飞机具有垂直起降的优点,飞行速度和航程大大提高,还能在目的地悬停并执行类似旋翼飞行器的任务。
QuadPlane 以 Plane 为基础,但为一个或多个电机增加了类似于旋翼飞行器的稳定性控制。在某些配置中,还增加了 4 个或更多额外的电机。附加的模式和指令允许 QuadPlane 像旋翼飞行器一样起飞、着陆和飞行,并能在自动和自动驾驶辅助模式下在飞机和类旋翼飞行器(VTOL)模式之间平稳过渡。额外的旋翼还能在普通飞机模式下提供升力和稳定性。
类型和配置¶
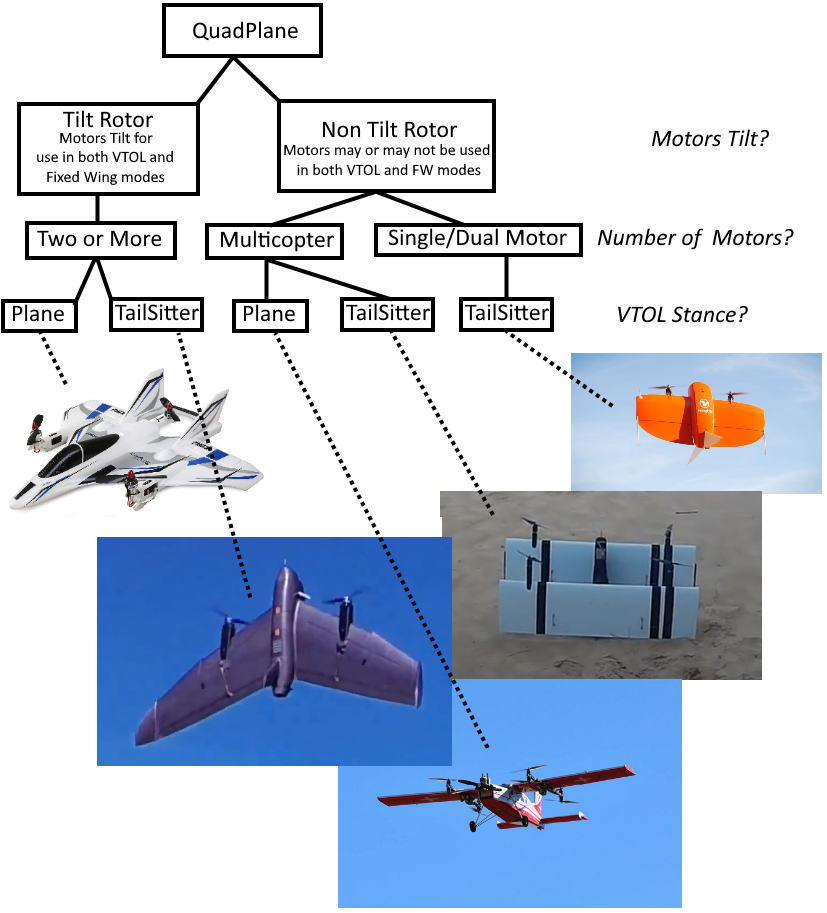
下图展示了各种可能的配置。电机可以受倾斜控制,也可以不受倾斜控制;电机数量可以从 1 个到 8 个或更多不等;QuadPlane 的 VTOL 姿态可以是水平的,就像正常固定翼飞行的飞机,也可以是垂直的(称为尾翼)。
安装固件¶
由于 QuadPlane 功能是 Plane 固件中的一个选项,因此适用于安装 Plane 固件的常规说明。
安装飞机固件并查看参数列表时,您会看到一个 Q_ENABLE 参数。默认值为 0,即禁用 QuadPlane 支持。设置 Q_ENABLE 为 1 将启用 QuadPlane 支持。然后,您需要刷新参数列表,查看所有其他 QuadPlane 选项。所有 QuadPlane 特定参数都以 Q_ 开头。