垂直起降设置技巧¶
对于初次使用 QuadPlane 的用户,有一些有用的提示和技巧。
重型商用垂直起降固定翼飞行器运营商也应阅读:
电机校准¶
电机校准对任何飞机的性能都至关重要,但对垂直起降固定翼飞行器来说尤其如此。VTOL 发动机未对准会极大地影响 VTOL 的基本性能,尤其是偏航修整和有效性,同时也会影响固定翼飞行性能。
在工作台上检查电机对准情况时,可将载具停在水平位置,测量所有电机的螺旋桨到工作台的距离,并将螺旋桨置于前后和左右位置。测量结果的差异很容易揭示对准错误。用螺旋桨尖端端差的弧正弦除以螺旋桨直径,就能得出倾斜角度。一到两度的不对中虽然不会对俯仰或滚转造成灾难性影响,但在非偏航配置中却会造成严重的偏航误调。
从 VTOL 发动机悬停时的 dataflash 日志 RCOUT 值中也可以看到不对齐现象。偏航问题表现为对角线电机对之间存在较大间距。
对于矢量推力框架,固定翼模式校准也至关重要。在向前飞行时,发动机推力角之间极小的差异就会产生不良的、有时甚至是无法控制的滚转修整趋势。因此需要仔细检查和调整固定翼模式的前向位置,使其与机身和彼此保持一致。
X 与 H 四路混合¶
如果机身刚性很好,X 和 H 混合方案之间的性能差异可以忽略不计。然而,四旋翼飞机的结构刚性通常不如传统的多旋翼飞机,因此必须考虑扭转效应。当偏航输入导致四旋翼飞行器的大部分重量由一对对角线电机支撑时,四旋翼飞行器的机身或机翼可能会扭曲,并使部分或所有电机的推力矢量发生变形。除非使用适当的混合方案,否则这种扭曲通常会引起偏航力矩,从而降低甚至完全丧失偏航效果。虽然这种影响取决于机身,但通常可以用以下两种方式之一来概括:
机身上的四电机安装在机翼前后延伸的臂上,与弦向一致。在使用 X 混合方案时,任何诱导的扭曲都应与所需的偏航相辅相成。如果在此配置中使用 H 混合方案,则偏航输入可能会导致机翼扭曲,从而与所需的偏航相抵消。
机身左右延伸的臂上安装有四台发动机,通常连接在机头和机尾附近。在使用 H 混合方案时,任何诱导的扭转都应与所需的偏航相辅相成。如果在此配置下使用 X 混合方案,偏航输入可能会导致机身扭曲,从而抵消所需的偏航。
"LEVEL "修饰¶
设置 QuadPlane 时,应在飞机处于正常巡航姿态(即机翼攻角)时进行 "水平 "校准。在非尾翼垂直起降机中,如果 VTOL 发动机的垂直位置与该姿态不呈 90 度,那么垂直起降机在悬停时将倾向于向前或向后移动,需要输入摇杆来改变俯仰角。或者,在尾翼四旋翼机中,如果电机的 "微调 "位置和/或垂直 CG 在垂直时不通过推力线,也会发生漂移。
幸运的是,有一个参数可以独立调整 VTOL AHRS 的 "水平 "姿态。这个参数是 Q_TRIM_PITCH 以度为单位,在 AHRS "电平 "上添加负或正值。
不过,对于非尾翼垂直起降机来说,有一个更好的方法。如果机械上可行,在垂直起降飞行器处于固定翼 "水平 "模式时,将每个电机微调成垂直状态,以便使用 Q_TRIM_PITCH 不需要。通常,这需要 3-5 度的前倾。这样做的好处是让机翼在风中悬停时产生升力,减少 VTOL 发动机的负荷,并防止从固定翼飞行转回 VTOL 模式时突然改变俯仰角。
备注
通过 3D 打印机制作支架的人很容易做到这一点,上文讨论的偏航增强倾斜也是如此。
备注
固定翼俯仰 "水平 "修整由加速度计校准过程中完成的 AHRS "水平 "设置,它可调整 AHRS_TRIM_Y 值,加上任何 PTCH_TRIM_DEG (度)。参见 加速度计校准 和 调整巡航配置 了解更多详情。
仅通过加速度 LeveL 校准 VTOL "水平 "调整¶
还有另一种略微复杂的方法,可以设置 VTOL 姿态俯仰调整,而无需使用 Q_TRIM_PITCH仅适用于尾随者:
进行正常的固定翼加速度计校准。但要读取并保存 AHRS_TRIM_Y 校准后的值。
将飞行器置于 VTOL 姿态(机头垂直指向),并将模式设置为 QSTABILIZE。确保 Q_TRIM_PITCH = "0",否则下一步将失败。
进行 "仅 LEVEL "加速度计校准。在Mission Planner地面站中,加速度计校准下有一个按钮。在 MAVProxy 中,可以使用 "ahrstrim "命令。
恢复先前记录和保存的 AHRS_TRIM_Y 值,以恢复固定翼姿态俯仰调整。
在某些情况下 Q_TRIM_PITCH 如果使用的校准姿态不是真正的悬停姿态,则可能仍需调整。
旋翼飞行器马达与伺服电机¶
如果您使用的配置涉及到旋翼飞行器电机(除了单/双电机尾翼飞行器外,几乎所有 QuadPlanes 都是如此),除非进行更改,否则电机输出将被指定为 PWM 协议(请参阅 "PWM 协议")。 PWM、OneShot 和 OneShot125 电子调速器 ).但 PWM 的更新率为 400Hz,而不是 50Hz。如果在一个输出组中使用伺服与其中一个电机输出共享同一个定时器,那么伺服也将以 400Hz 的频率工作,并且必须能够承受这一频率。大多数模拟伺服都会过热或烧毁。大多数数字伺服系统可以承受这种频率。检查(飞行)控制器的 硬件描述 页面,该页面显示哪些输出共用同一个定时器。
倾转旋翼伺服器设置¶
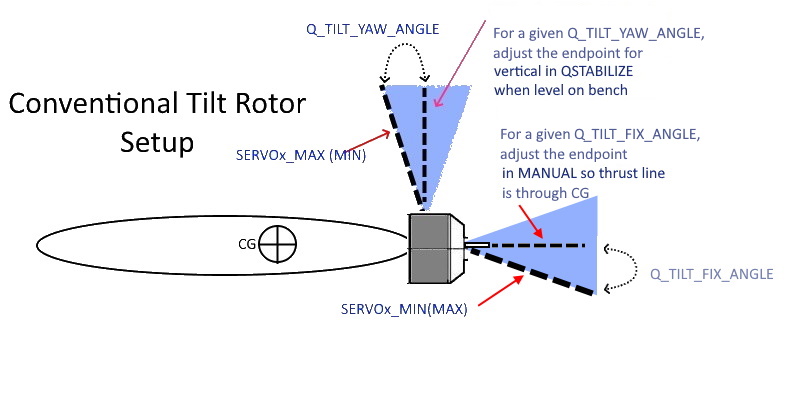
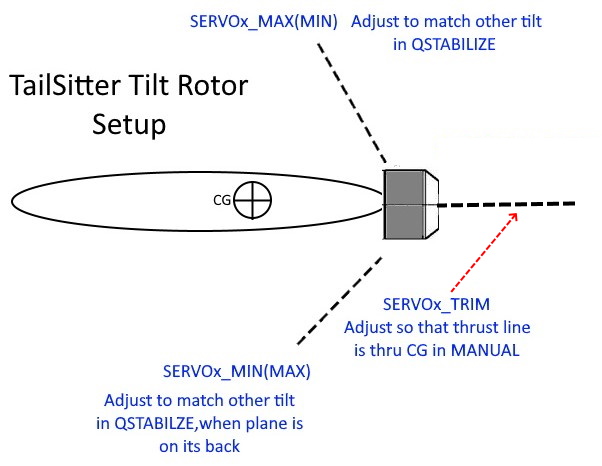
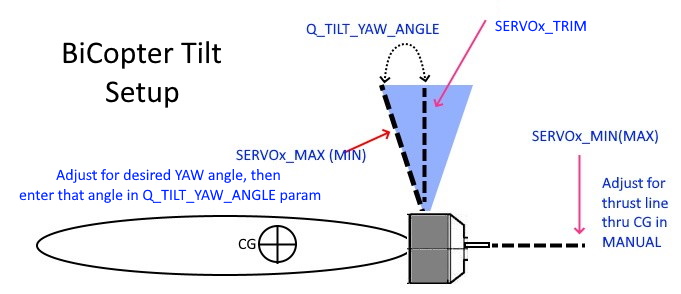
传统和尾翼倾斜旋翼的倾斜伺服最大、最小、微调输出值的调整如下所示。端点是由 SERVOx_MAX 调整还是由 MIN 调整,取决于其是否已反转以获得正确的方向操作。
备注
设置 Q_OPTIONS 第 10 位(解除警报偏航倾斜)允许电机在解除警报时根据方向舵输入进行倾斜,以方便调整参数。
电池电量不足¶
许多 QuadPlanes 以持续时间为目标,因此可能会使用高容量重量比但低 "C "的电池。在 VTOL 向固定翼过渡的初始阶段,电池下垂可能是一个真正的问题。请务必阅读 驾驶垂直起降固定翼飞行器 并设置 BATT_WATT_MAX, q_m_bat_curr_max和 q_m_bat_volt_min 适当的参数。
有时被忽视的可选功能¶
如果你错过了
各种 QuadPlane 选项: Q_OPTIONS其中第 0 位和第 3-5 位尤为有趣
RTL 行为; Q_RTL_MODE