尾随者飞机¶
在 ArduPilot 中,尾翼是指在前飞和悬停之间移动时可旋转机身(和(飞行)控制器)的任何 VTOL 飞机类型。
尽管名称如此,但并非所有的尾随者都是用尾巴着陆的。有些是 "腹部着陆",即平躺着着陆,以提高在风中起飞和着陆的稳定性。有些可能有底盘,用于轮式起飞,还有些可能有支架或其他着陆辅助装置。
在 ArduPilot 中,所有尾翼都被视为 QuadPlanes 的类型。您应该首先阅读 QuadPlane 文档 在进入尾随者专用文档之前,请先阅读本文档。
通过设置 q_tailsit_enable 为 "1",适用于大多数尾翼,或为 "2",适用于仅有旋翼飞行器电机的尾翼(没有升降舵或副翼/升降器等控制面的尾翼)。
矢量和非矢量¶
ArduPilot 将尾随者细分为两大类:
矢量尾翼可以不受机身运动的影响而倾斜旋翼,从而获得矢量推力
非外转子尾翼飞行器的旋翼相对于机身的方向是固定的,并依靠大型控制面获得悬停权(尽管双发动机版本也可使用差动推力进行机身偏航控制)。
非推进器有两个子类别:单/双马达和 CopterMotor:
单/双马达使用一个或两个马达,如果使用双马达,则只能使用差动推力。单电机尾翼飞行器与普通 3D 飞机类似,可以使用暴露在单电机螺旋桨冲刷下的大型控制面进行悬停控制,但 ArduPilot 可提供悬停、位置悬停和 VTOL 任务导航所需的控制稳定性。双马达可增加差动推力,协助机身偏航控制,而旋翼飞行器马达尾翼在 VTOL 状态下几乎与多旋翼飞行器相同,如果有飞行表面,还可增加控制功能。
CopterMotor 使用三个、四个或更多电机,操作方式更类似于旋翼飞行器。它们可能有控制面,也可能没有在固定翼飞行中可用的控制面。** 没有 CopterMotor 的尾翼飞行器(即只有一个没有控制面的升力翼)在固定翼飞行模式下必须始终使用其电机进行控制。设置 q_tailsit_enable = 2 会自动执行此操作。
尾随者配置¶
固件版本 4.1 及更早¶
要让 QuadPlane 成为尾随者,关键在于设置 Q_FRAME_CLASS =10 或 q_tailsit_motmx 非零。这就告诉 QuadPlane 代码使用尾翼 VTOL 后端。
固件版本为 4.2 及更高版本:¶
要使 QuadPlane 成为尾随者,只需设置 q_tailsit_enable 改为 "1 "或 "2",以告诉 QuadPlane 代码使用尾翼 VTOL 后端。
如果 q_tailsit_motmx 为零(默认值),即没有类似多旋翼飞行器的电机,它将为固定翼控制代码提供滚转、前平移/俯仰、偏航和推力(节流阀/电门、油门左、油门右)值。这些值将控制副翼、升降舵、升降舵、方向舵和前进电机。
这样做的好处是,在设置尾翼时,您可以在手动和 FBWA 模式下按照正常的固定翼设置指南进行操作,然后切换到悬停模式时,所有控制方向都将正确无误。
这也意味着您可以将任何能够进行 3D 飞行的固定翼飞机作为单或双马达尾翼飞行器,并在 QSTABILIZE、QHOVER 和 QLOITER 等模式下飞行。
不过,它也可以像传统的 QuadPlane 一样装有类似于旋翼飞行器的发动机,前提是 q_tailsit_motmx 为非零。那么该参数将决定哪些电机在正常向前飞行(飞机模式)时保持激活状态。如果不为零,则使用 Q_FRAME_CLASS 和 Q_FRAME_TYPE 参数来配置多旋翼飞行器的电机样式,相应的 MOTORx 输出将被激活。
Q_FRAME_CLASS 决定 VTOL 发动机的数量和布局,以及 q_tailsit_motmx 决定在固定翼模式下哪些电机处于激活状态,但 "仅有尾翼飞行器电机"(Copter Motor Only Tailsitter)模式除外,该模式即使在无控制面尾翼飞行器的固定翼模式下飞行,也会像 "飞行器 "模式一样持续运行电机(即始终运行电机以提供姿态控制,即使在低油门时也是如此)。
尾随者风格 |
启用 |
类别 |
类型 |
运动步枪 |
电机输出功能 |
|---|---|---|---|---|---|
3D 单马达 |
1 |
10(单人/双人) |
NA |
0 |
节流阀/电门 |
双马达和矢量双马达 |
1 |
10(单人/双人) |
NA |
0 |
左油门,右油门 |
带有固定翼控制面的尾翼飞行器 |
1 |
以匹配 VTOL 发动机的数量 |
以匹配电机混合 |
固定翼模式下的主动发动机 |
电机 1- 电机 x |
无固定翼控制面的尾翼飞行器 |
2 |
以匹配 VTOL 发动机的数量 |
以匹配电机混合 |
固定翼模式下的主动发动机 |
电机 1- 电机 x |
ENABLE(启用)栏指的是 q_tailsit_enable 参数,而 CLASS、TYPE 和 MOTORMASK 指的是 Q_FRAME_CLASS, Q_FRAME_TYPE和 q_tailsit_motmx分别为
电机布局¶
旋翼飞行器尾随者¶
如果符合以下条件,所有旋翼飞行器电机布局都可作为旋翼飞行器电机尾翼得到支持 q_tailsit_motmx 为非零。参见 旋翼飞行器的电机布局部分.如果不为零,则使用 Q_FRAME_CLASS 和 Q_FRAME_TYPE 参数来配置多旋翼飞行器的电机样式,相应的 MOTORx 输出将被激活。
备注
在 4.1 之前的固件版本中,CopterMotor 尾追器不使用任何偏航力矩控制。滚动(相对于机身)仅由飞行表面(副翼或升降舵)控制。现在,QUAD PLUS 和 X 机架可通过电机控制偏航,并添加了机架类型 16 和 17,与之前的 PLUS 和 X 版本一样,不使用扭矩偏航控制。
备注
(在固件 4.1 及更早版本中,可以使用 CopterMotor 尾追器,但不使用固定翼控制面,即基本上是带机翼的四旋翼飞行器。在这种配置下,所有 Copter 电机都将通过以下设置激活固定翼模式 q_tailsit_motmx 和 Q_OPTIONS 位掩码中的第 7 位(强制 QASSIST)被设置为在所有模式下都激活 QASSIST。在固件 4.2 及更高版本中,要进行此配置,请使用 q_tailsit_enable = 2,强制 QASSIT。 q_tailsit_motmx 在这种情况下会被忽略。
此外,还有两种旋翼飞行器尾翼专用配置,可为旋翼飞行器式电机提供无偏航力矩(NYT)控制: Q_FRAME_TYPE =16(加)和 =17(X)。
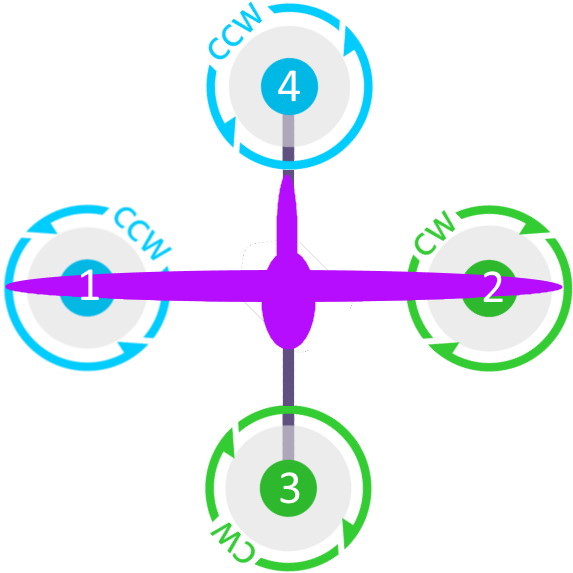
(从上往下看鼻子)
NYT QUAD PLUS 电机尾随者¶
电机由 M1-M4 输出控制:
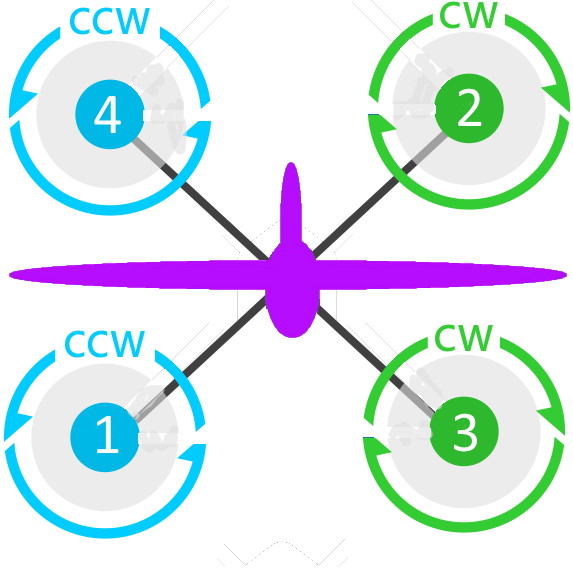
NYT QUAD X 电机尾随者¶
电机由 M1-M4 输出控制:
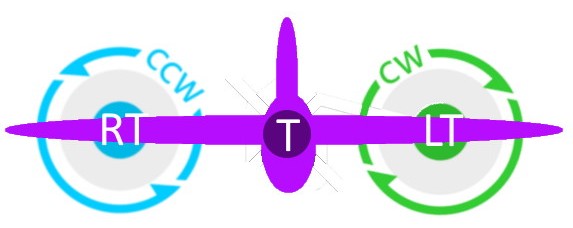
单/双马达尾灯¶
如果 q_tailsit_motmx 为零,且 Q_FRAME_CLASS =10,则使用单/双电机配置。也可使用倾斜伺服器对电机进行矢量控制,从而获得更高的控制权。如果不采用矢量控制,这些机架则依靠暴露在螺旋桨气流中的大型控制面来保持控制。电机布局如下所示:
(从上往下看鼻子)
电机由节流阀、节流阀左、节流阀右输出控制:
(飞行)控制器方向¶
"这款" 方向加速度计校准和水平调整都应在固定翼飞行时进行。固定翼飞行被认为是尾随者的 "正常 "方向。
在 VTOL 飞行中,飞机机头会尝试垂直指向,以实现 "水平 "飞行
固定翼飞行时,机头会尽量指向水平方向,以实现 "水平 "飞行
主要参数¶
对于尾随者来说,固定翼飞行与 VTOL 飞行的主要区别在于:
在 VTOL 模式下,将使用旋翼飞行器式 PID 增益(以
Q_A_RAT_x)当固定翼飞行时,将使用固定翼的 PID 增益(在固定翼飞行时,将使用固定翼的 PID 增益)。
RLL_RATE_x和PTCH_RATE_x收益)q_tailsit_rll_mx 允许滚动限位角限位的设置不同于 Q_ANGLE_MAX.如果保持为零,则俯仰和滚动都受到以下限制 Q_ANGLE_MAX.如果 q_tailsit_rll_mx 如果滚动角度不为零,就会受到限制,而最大俯仰角仍将是 Q_ANGLE_MAX.如果您的尾翼可以达到比滚转安全角度大得多的俯仰角(有些机身仅使用偏航控制无法从高速刀刃飞行中恢复),则应设置该值。
Q_TRIM_PITCH 可用于计算由于推力线不通过 CG 而导致的悬停俯仰角偏移,或抵消用于设置巡航攻角的固定翼 AHRS 微调,而不是使用 PTCH_TRIM_DEG 因为它仅用于固定模式,而 AHRS 微调会影响所有模式。将其设置为在 QSTABILIZE 或 QHOVER 模式下,在没有飞行员输入的情况下,载具不会向前或向后漂移。
提示
校准加速度计后,使用 "LEVEL "校准位置作为固定翼的正常飞行姿态,您可能会发现 VTOL 机头向上悬停时会向一侧漂移(即地框滚动),以及前后漂移。虽然有 Q_TRIM_PITCH 您可以在飞行Mission Planner地面站中使用 "LEVEL "校准按钮(MAVProxy 中的 "ahrstrim "命令)设置俯仰和滚转调整。您可以使用Mission Planner地面站中的 "LEVEL "校准按钮(MAVProxy 中的 "ahrstrim "命令)来设置俯仰和滚转微调,但前提是您必须将模式更改为 QSTABILIZE 或 QHOVER。这可能会改变固定翼俯仰微调,但不会改变固定翼滚动微调。因此,您可能需要重新调整 PTCH_TRIM_DEG 参数,以获得固定翼飞行所需的俯仰姿态,以及 Q_TRIM_PITCH 值,但这应该能纠正侧漂。
矢量推力¶
如果您的尾翼有定向推力,那么您应该设置
SERVOn_FUNCTION 左、右发动机的两个倾斜伺服器以及左、右发动机节流阀的数值。
备注
所有尾随者都会忽略 Q_TILT_TYPE 参数,需要连续输出伺服,并将适当驱动倾斜伺服。
例如,如果左侧倾斜伺服器是通道 5,右侧倾斜伺服器是通道 6,则设置为:
servo5_function =75
servo6_function =76
例如,您需要使用 SERVO 7 和 SERVO 8 输出将左油门分配给左电机,右油门分配给右电机:
servo7_function =73
servo8_function =74
您还需要设置正确的 SERVOn_REVERSED 值,以及正确的
SERVOn_TRIM, SERVOn_MIN 和 SERVOn_MAX 值。
q_a_angle_boost 应禁用。如果不禁用此功能,会导致机头下降时油门减小,使机头进一步下降,从而导致坠机。
注意事项
解除警报后,切换到 QHOVER 或 QLOITER 将迫使发动机向前进入固定翼方向。如果在此位置上膛,"肚皮坐 "配置可能会发生螺旋桨撞击。当油门升至空转以上时,倾角将升至 VTOL 位置,但撞击已经发生。解决方法是将油门瞬间升至空转以上,让倾角升起,将油门杆恢复至空转,然后再进行上膛。自动模式起飞时也需要这样做,应从 QSTABILIZE 启动,电机升起,上膛,然后切换到自动模式起飞。
倾斜转子运动设置¶
TVBS(推力矢量肚皮摇摆器)¶
TVBS 只是一种双马达定向推力尾翼飞行器,它不是坐在尾部,而是腹部。在水平姿态时,除了要确保螺旋桨畅通无阻(即倾斜伺服器有足够的抛力)外,没有什么特别的要求能让它从水平姿态起飞。
空档(固定翼飞行位置)两侧至少要有 45 度的抛角,最好是 60 度。否则,在起飞时提高油门使其垂直时,飞行器会在地面上 "打滑"。起飞时,需要果断地将油门调到悬停或以上,以减少 "打滑"。
在固定翼、手动油门控制模式下着陆时,有一个 RCx_OPTION (89) 将在空转油门时强制倾斜伺服器直立,并可选择强制俯仰到目标位置。 LAND_PITCH_DEG 在正常固定翼着陆时,可将螺旋桨熄灭。这样,在手动、阿克罗、稳定和 FBWA 模式下进行有意或紧急固定翼着陆时,就不会有螺旋桨撞击的风险。
向量增益¶
有两种矢量增益可供选择。一个控制悬停时的矢量推力运动量,另一个控制向前飞行时的矢量推力运动量。
"这款" q_tailsit_vhgain 参数控制悬停时的矢量推力。典型值约为 0.8,可对悬停时的矢量推力进行大量控制。该控制与升降舵混合增益控制(由 MIXING_GAIN).
"这款" q_tailsit_vfgain 参数控制向前飞行时的矢量推力。典型值约为 0.2,可对前向飞行的矢量推力进行少量控制。该控制与升降舵混合增益的控制相结合(由 MIXING_GAIN).
通过调整 q_tailsit_vhgain, q_tailsit_vfgain 和 MIXING_GAIN 您可以在每种飞行模式下调整升降舵和推力矢量的控制程度。
CopterMotor PID 增益缩放¶
控制面运动与速度的比例有多种选择。控制面的有效性取决于它们所看到的空速,在尾翼配置中,这在很大程度上受电机布局和螺旋桨冲洗的影响。尾桨式飞行器通过推力和小型控制面获得大量控制权,对这些增益调度参数的敏感度要低得多。对于具有大型控制面的飞行器,必须注意设置增益缩放,以最适合其配置。
增益缩放方案的选择条件是 q_tailsit_gscmsk因为它是一个位掩码,所以有些选项可以组合使用,有些则必须单独使用。
任何方案可应用的最大和最小缩放比例由以下参数设置 q_tailsit_gscmin 和 q_tailsit_gscmax.如果一个方案在所有方面都运行良好,但在极端情况下,可以调整这些端点。
提示
缩放是相对于悬停节流点进行的,请在继续操作前确保设置正确,见: 飞行模式QHOVER 模式。
磁盘理论增益缩放是目前最先进的方法,如果设置正确,应能获得最佳效果。
节流阀缩放(位 0)¶
控制面将直接与油门成比例。大油门会导致控制面运动减少,小油门会导致控制面运动增加。非 CopterMotor 尾翼飞行器的推力矢量缩放始终使用这种方法,与以下因素无关 q_tailsit_gscmsk.
降低大油门/倾斜时的增益(位 1)¶
基于姿态/油门的增益衰减,使用该选项可在高倾角和高油门水平下减少控制面偏转,以防止在高空速下产生振荡。该功能可与节流阀缩放功能结合使用。
磁盘理论(第 2 位)¶
磁盘理论增益缩放试图计算螺旋桨冲刷和前进空速在控制面上产生的空速。为了进行计算 q_tailsit_dskld 必须设置。这是飞机重量(KG)除以螺旋桨的总圆盘面积。每个螺旋桨的圆盘面积由半径计算得出,然后将所有螺旋桨的圆盘面积相加。这使得 ArduPilot 可以计算螺旋桨正后方的空速,但在实际飞行器上,控制面并非 100%处于螺旋桨的直接冲刷中。
例如,如果一半的控制面处于螺旋桨冲洗中,计算出的盘载荷值也应减半。为了获得最佳性能,需要进行一些调整。 q_tailsit_dskld 应该减少。
为达到最佳效果,应安装空速传感器。
高度校正(位 3)¶
增益与海拔高度成比例,在大范围海拔高度上运行时应考虑到这一点,该方法可与任何其他方法结合使用。
过渡¶
尾翼过渡与其他 QuadPlane 过渡略有不同。
q_tailsit_angle 指定在 VTOL 模式下,机头必须向下倾斜多远才能完成向前飞行的过渡。因此,例如 60 度的值会导致当机头到达地平线上方 30 度(从垂直方向向下 60 度)时,从旋翼飞行器控制器切换到飞机控制器(向前过渡)。俯仰向前飞行时使用的俯仰率为 q_tailsit_rat_fw,这一比率将保持到 q_tailsit_angle 达到。
从正向飞行到 VTOL 的后向过渡,将使用飞机控制器,直到机头到达 q_tailsit_ang_vt 地平线以上。如果 q_tailsit_ang_vt 为 0 q_tailsit_angle 将用于前进和后退转换。俯仰至 VTOL 飞行时使用的俯仰率为 q_tailsit_rat_vt,这一比率将保持到 q_tailsit_ang_vt 达到。
备注
如果您在地面上进行反转,即在 FW 模式下零油门全副上膛,然后切换到 VTOL 模式,发动机会立即开始旋转,直到 "过渡 "完成,发动机向上倾斜。这会导致地面移动。为避免出现这种情况,您可以设置 Q_OPTIONS 位 18,以防止在已进入 VTOL 模式的情况下进行上膛。
根据进入速度和过渡所需的时间,载具可能会增加高度,有时会增加很多,因为油门设置为当前高度。 q_m_thrst_hover 在向 VTOL 过渡的整个过程中,悬停推力值都将保持不变。通过设置 q_tailsit_thr_vt.通过实验,改变固定翼到 VTOL 过渡的速率、角度和此参数,有可能获得几乎水平的高度过渡。特别是在使用 Q_TAILSIT_ENABLE = 2 时,没有控制面的旋翼飞行器式尾翼,即使在油门值较低或为零的情况下也能保持姿态控制。
备注
在转换过程中,驾驶员输入无效,载具姿态和油门完全由(飞行)控制器控制。
提示
过渡完成后,ArduPilot 将向 GCS 发送信息,这些信息可在Mission Planner地面站信息选项卡中找到。如果过渡没有正常完成,则应检查过渡参数和飞行器调整。示例信息如下 过渡 FW 做完了 超时因此,超时时间是根据角度和速率参数计算出的预期过渡时间的 1.5 倍。
控制面¶
虽然通常不建议使用尾翼飞行器,但也可以使用无控制面的尾翼飞行器。首先应注意使飞行器在悬停模式下飞行良好。
Q_OPTIONS 第 7 位:强制 Qassist 将强制载具在所有飞行模式下使用旋翼飞行器控制器。
Q_OPTIONS 第 8 位:Mtrs_Only_Qassist 允许使用旋翼飞行器控制器来控制电机,但不对任何控制面进行平面控制,这使得控制面可以充当电机的 "微调片"。
参见 辅助固定翼飞行 有关 Qassist 如何根据空速、高度、姿态和/或飞行高度自动启用和禁用的更多详情,请参阅 "如何启用和禁用 Qassist"。 RCx_OPTION 开关。
尾随者输入¶
您可以通过使用 q_tailsit_input 参数。可供选择的参数有
q_tailsit_input =0 表示飞机在悬停时的反应类似于多旋翼机,偏航杆控制地面机身的偏航,滚转杆控制地面机身的滚转。对于习惯于驾驶多旋翼飞机的飞行员来说,这是一个不错的选择。
q_tailsit_input =1 表示飞机在悬停时的反应与 3D 飞机相同,偏航杆控制地面机身的滚动,滚动杆控制地面机身的偏航。对于习惯于在螺旋桨悬停状态下驾驶 3D 飞机的飞行员来说,这是一个不错的选择,但由于地球框架多旋翼飞行器的控制输入,在环绕飞行时并不十分有用。
q_tailsit_input =2 和 3 表示飞机在水平飞行时的反应与 3D 飞机相同,偏航杆控制地面机身偏航,滚转杆控制机身滚转。悬停时,这些选项的行为分别与类型 0 和 1 相同。这是通过将滚转和偏航指令输入拆分为作为欧拉俯仰函数的机身滚转和偏航分量来实现的。
备注
由于尾翼机身相对于多旋翼飞行器机身的旋转,滚动限制由参数 Q_YAW_RATE_MAX (度),偏航率限制由参数 q_tailsit_rll_mx (度/秒)。螺距限制由参数 Q_ANGLE_MAX (度),同时也作为偏航率限制,如果 q_tailsit_rll_mx 为零。如果任何速率限制对机身来说都过高,那么在高速率时可能会出现姿态控制故障。
备注
q_tailsit_input 在 QACRO 模式中被忽略。所有输入均以车身框架为基准。
尾随器输入掩码¶
备注
不建议使用该功能,因为 4.2 及更高版本的固件已删除了该功能
为了帮助有 3D 飞机飞行经验的人学习如何手动悬挂螺旋桨,您可以设置 Q_TAILSIT_MASK<Q_TAILSIT_MASK>; 以确定在 QHOVER 和 QSTABILIZE 模式下悬停时,哪些通道可以在没有姿态稳定的情况下进行全手动输入控制。
使用发射机输入通道启用手动通道屏蔽,该通道用 Q_TAILSIT_MASKCH<Q_TAILSIT_MASKCH>; 参数。
例如,如果您正在学习如何驾驶 3D 飞机,并希望在学习如何以最佳方式控制方向舵时得到一些帮助,那么您可以设置为 "我的方向舵":
Q_TAILSIT_MASK<Q_TAILSIT_MASK>;=8(用于舵)Q_TAILSIT_MASKCH<Q_TAILSIT_MASKCH>;=7
然后,当通道 7 升至 1700 以上时,飞行员将在盘旋时完全手动控制方向舵。这样就可以同时在一个或多个轴上进行良好的 3D 驾驶练习。
重心¶
尾翼飞机的重心在一个额外的维度上非常重要。悬停时,飞机腹部或背部的重量不能过重,以免飞机向前或向后倾斜。这一点对于非vectored 尾随者尤为重要。
臂前问题¶
由于 DCM 中存在一个与直立时偏航的罗盘融合有关的问题,有时 AHRS 子系统在机头向上开机时会出现分歧。罗盘校准中的轻微误差虽然会导致校准成功,但可能会加剧这种影响。
其结果是,某些设置会导致预臂故障。通常是 "Pre-Arm:DCM roll/pitch inconsistent by "x "degree"(预臂:DCM 滚动/螺距不一致 "x "度)或类似信息。如果这种情况持续发生,则可以采用以下两种解决方案之一:
水平开机,让(飞行)控制器在此位置开始初始化。IMU 倾斜初始化完成后(通常在最初的 10 到 15 秒左右),可将尾翼垂直设置为初始化的剩余时间(即 GPS 锁定和 EKF 使用 GPS 之后),然后上膛。
或者,如果出现上述预上膛故障,请将尾翼水平放下 10-30 秒,让各 AHRS 子系统同步。之后再将其升起,上膛就可以正常进行了。