QLOITER 模式¶
QLOITER 模式会自动尝试保持当前位置、航向和高度。飞行员可以在 QLOITER 模式下驾驶 QuadPlane,就像在手动飞行模式下一样,但当松开摇杆时,飞行器会减速停止并保持位置。
良好的 GPS 锁定、 罗盘的低磁干扰 和 低振动 对实现良好的 QLOITER 性能都很重要。
控制装置¶
飞行员可以用控制杆控制 QuadPlane 的位置。
水平位置可通过滚动和俯仰控制杆进行调整,默认的最大水平速度为 5 米/秒(有关调整方法,请参阅下面的 "飞行稳定调整 "部分)。飞行员松开控制杆后,QuadPlane 将减速停止。
可以使用油门控制杆控制高度,就像在飞机上一样。 QHOVER 模式。
可以用偏航控制杆设定航向
在 QLOITER 模式下,载具的上膛方式与其他模式相同,但只有在 GPS 3D 锁定且 HDOP 下降到 2.0 以下时才能上膛,与其他模式一样,除非修改了默认上膛检查以避免检查 GPS(不推荐!)。 有关 LED 图案的更多详情,请点击此处.
飞行稳定调整¶
QLOITER 模式包含 QHOVER 模式的高度控制器。飞行稳定调整详情见 QHOVER 模式描述。
Q_LOIT_SPEED:最大水平速度(厘米/秒)(即 1250 = 12.5 米/秒
Q_LOIT_ACC_MAX:最大加速度,单位为 cm/s/s。数值越大,QuadPlane 的加速和停止速度越快
Q_LOIT_ANG_MAX:最大倾斜角度,单位为厘度(即 3000 = 30deg)。默认情况下,该值为零,这会导致 最大角度 参数的值
q_loit_brk_accel:制动时的最大加速度,单位 cm/s/s(即驾驶员将操纵杆移至中心位置)。数值越大,载具停止得越快
q_loit_brk_delay:飞行员将操纵杆对准中心后开始制动前的延迟时间,以秒为单位
q_loit_brk_jerk:制动时加速度的最大变化,单位 cm/s/s/s。数值越大,载具越快达到最大制动角度,数值越小,制动越平稳
Q_P_POSXY_P速度:将水平位置误差(即期望位置与实际位置之间的差值)转换为向目标位置移动的期望速度。 一般不需要调整
Q_P_VELXY_P 将飞向目标的预期速度转换为预期加速度。由此产生的期望加速度变成倾斜角,然后将其传递给以下系统使用的相同角度控制器 QSTABILIZE. 一般不需要调整
常见问题¶
载具 马桶圈.这通常是罗盘问题造成的,最有可能的是 磁干扰 (飞行)控制器下方的电源线。其他可能性包括罗盘偏置设置错误。 现场校准过程 或指南针方向不正确。
一旦启动 QLOITER,载具就会向错误的方向行驶。原因与 #1 相同,只是罗盘误差大于 90deg。请尝试上述建议解决此问题。
载具在正常行驶过程中,突然向错误的方向行驶。这通常是由于 GPS 故障.没有百分之百可靠的防范措施,这意味着飞行员应随时准备接管手动控制。除此之外,在起飞前确保良好的 GPS HDOP 始终是件好事,它可能有助于减少以下情况的发生
EK2_GLITCH_RAD和/或EK3_GLITCH_RAD参数(见 GPS 故障维基页面 详细信息)来加强故障检测。QuadPlane 会缓慢下降或爬升,直到飞行员重新控制飞机稳定下来。通常,这是由于油门杆没有处于中间位置造成的。这种情况通常发生在飞行员从手动飞行模式(如 QSTABILIZE)切换到高度保持模式时,QuadPlane 无法在油门杆中间位置悬停。通常情况下,希望在任何模式下都能以杆中油门悬停,这样就可以在不改变油门位置的情况下轻松完成模式之间的转换。可以使用 Q_M_THST_HOVER 参数,或在 QHOVER 或 QLOITER 模式下通过启用 q_m_hover_learn.
在Mission Planner地面站上显示 HDOP¶
在Mission Planner地面站的 "快速 "屏幕上双击,然后从一大格复选框中选择 "gpshdop",就可以清楚地看到 HDOP 值。

使用数据闪存日志验证 QLOITER 性能¶
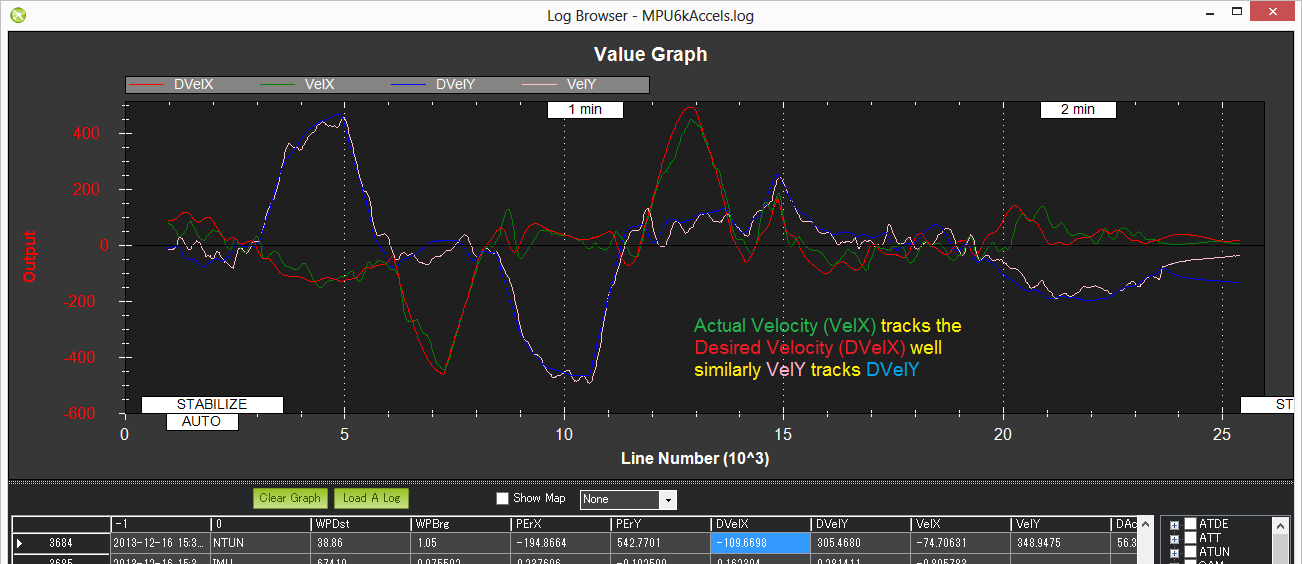
查看 QLOITER 水平性能的最佳方法是 下载数据闪存日志 然后用Mission Planner地面站打开它,并绘制 NTUN 信息的 DesVelX vs VelX 和 DesVelY vs VelY 图。在性能良好的 QuadPlane 中,实际速度将与期望速度保持一致,如下图所示。X = 纬度(因此正数 = 向北移动,负数 = 向南移动),Y = 经度(正数 = 向东移动,负数 = 向西移动)。
检查高度保持性能的方法与 QHOVER 模式。