归档:故障排除¶
警告
本页面未经维基审批团队审核。它似乎包含大量过时和未经验证的材料 - 2015 年 6 月。
电机无法运转和/或电调无法启动¶
这可能是由于一些错误造成的:
您是否已完成所述的强制性硬件配置步骤 这里?
您是在 "Acro"、"Stabilize "还是 "Simple "模式下?作为一项安全措施,电机不会在其他模式下启动。
您是否按照建议使用 APM 2.5 电源模块为 APM 板供电?如果不是,而且您通过 PDB 使用其中一个电调为电路板供电,请确保 JP1 跳线处于打开状态。
您确定上膛正确吗?电机上膛后,IMU 上的上膛 LED(APM1 为绿色,APM 2 为黄色)将在 IMU 校准闪烁(约 5 秒)后变为实心。查看 上膛指南 以确保您做得正确。
发射机上的偏航或油门通道是否接反了?试着将偏航杆移动到最左边,而不是右边。如果这样做有效(IMU 校准后绿色 LED 灯变亮),说明您的偏航通道反了。如果不行,请尝试与节气门通道相同的方法:将其推到最大值,然后尝试完全向右偏航。如果成功,说明油门通道反转。
您的遥控装置处于模式 2 吗?如果不是,您需要将右摇杆(偏航/航向)移到右侧,左摇杆(节流阀/电门)移到上方(或者直接切换回模式 2)。
请尝试先插入 USB 电缆启动电路板,然后在电路板启动后再插入锂电池,或者确保在常规启动过程中断开 APM 电路板到配电板之间的四线电缆。查看详情 这里.
可能是您在进行初始无线电校准后更改了油门微调设置。将油门调低几个档位,然后再试一次上膛。
有些电调有最低低阈值,然后才会启动。如果有必要,可降低无线电油门并重新进行无线电校准。
在Mission Planner地面站中重新进行无线电校准。确保正确读取节流通道(第 3 章),数值约为 1100(低)和 1900(高),或多或少。请记住,必须插入锂电池才能为遥控设备供电。
如果您已经检查了前面的事项,可能需要重新校准电调。用手动方式(这里 可以肯定的是)。
我的 APM 2 锁定了¶
原因可能是数据闪存卡没有正确初始化。要验证问题出在这里,请取出数据闪存卡并尝试重新启动 apm 2。
如果是这种情况,有一个简单的解决办法。装回数据闪存,然后打开电路板电源,同时观察终端屏幕。它会重新格式化数据卡(这需要一段时间)。插上电源 2 分钟。之后,您应该会看到 "准备就绪 "的信息。您只需这样做一次。
当我试图起飞时,旋翼飞行器会倾斜/翻转或疯狂摇摆。¶
这几乎总是意味着您配置或设置错误。请检查以下内容:
APM 板是否朝向前方并与前行运动方向一致(在 + 模式下朝向前臂,在 x 模式下位于两臂之间)?
您是否在设置过程中正确设置了四边形方向?是 + 还是 x?
检查所有电机的连接是否正确,转动方向是否正确,推拉螺旋桨是否安装在正确的电机上,方向是否正确。
检查配电板上的信号线,确保方向正确。如果接反了两根,就会导致 Copter 翻转。通过手动测试也可以发现这一点。(在上面的电机测试中也应该可以看到)。
检查螺旋桨是否无法在电机轴上转动,好像没有拧紧。如果有一个螺旋桨虽然拧紧了,但仍能转动,这可能意味着其电机轴被压入电机太深,螺旋桨座无法抓住。取下螺旋桨,用小型内六角扳手拧松将轴固定在马达上的小固定螺丝。然后用钳子将轴拉出,直到与其他电机的轴高度一致。然后拧紧固定螺丝,装回螺旋桨并再次拧紧。
在启动时的整个校准过程中,四边形是否稳定、平整?在设置过程中是否稳定平整?(如有必要,请再做一次)
您校准过电调吗?推进油门时,它们应该同时启动。如果有必要,请按照描述再次手动校准。 这里.
您是否设置并测试了无线电?运行测试/无线电查看。前平移/俯仰、左平移/横滚、油门和偏航都应为 0 或接近 0(60 或更低)。将俯仰和滚转杆移到右下方,您应该可以在通道 1 和 2 中看到大约 4500、4500。
您是否在Mission Planner地面站中检查过所有传感器,以确保硬件正常工作?
我的旋翼飞行器动力过大,火箭飞上了天空,除非我切断油门,否则无法降下来¶
动力过强的多旋翼飞行器可能只需要很小的油门就能悬停,即使是最小油门(13%)也足以让它们爬升。此外,默认的滚转/俯仰增益率是为较弱的多旋翼飞行器设计的,对于动力强劲的多旋翼飞行器来说过高,可能会导致滚转/俯仰不稳定。Copter 固件可能会尝试通过增加总节流阀来补偿这种翻滚/俯仰不稳定性,这可能会导致 Copter 进一步爬升(注:在这种特殊情况下,Copter 增加总节流阀会适得其反,但在经过适当调整的四旋翼飞行器中,在出现电机故障的情况下,增加总节流阀会有所帮助)。
可能的解决方案有
在车架上增加重量,使悬停油门更靠近中杆
将 THR_MIN 参数(默认值为 130 或 13%)减小到仍能保持所有电机稳定转动的最低值
在第一次飞行时将滚转/螺距增益率设得较低(可能是默认值的 1/2),然后再提高。考虑使用 CH6 调整功能,以便在最初几次飞行中调整滚转/螺距增益。
我的旋翼飞行器电机旋转,但旋翼飞行器无法起飞(或者电机可能根本不转)。¶
虽然有几种不同的原因会导致旋翼飞行器被认为动力不足,但这种情况适用于电机旋转速度不够快(如果有的话!),无法产生所需的升力,即使您知道它们可以旋转得更快。最近发现的一些情况表明,有人不小心从 3D Robotics Aero 将错误的参数文件导入了他们的旋翼机,而当他们加载正确的参数文件时,THR_MAX 参数却保持不变。
检查以下内容:
通过 GCS 与旋翼飞行器连接
转到完整参数列表
检查 THR_MAX 参数,确保其值介于 800 和 1000 之间。默认值为 1000。
参考:3D Robotics Aero 预设参数文件将其设置为 80。
如果 THR_MAX 参数小于 800,且您不记得进行过此更改,则将该参数设置为 1000,然后向旋翼飞行器写入参数
我的无线电设置没有正确读取遥控频道或挂起¶
检查以下内容:
点击 "校准 "单选按钮。这将启动测量过程。
您是否确定接收器有电并与发射器配对(应显示绿色指示灯)?确保发射器处于开启状态!
如果电路板是自己组装的,请仔细检查焊接情况!APM 板上的一个微小短路就可能使所有通道失效。
我们收到过一些报告,称老式调频遥控设备甚至偶尔的数字接收机都出现了问题,原因尚不清楚(很可能是电压输出过低)。您能换个接收机试试吗?这样至少可以排除这种可能性。
我们也收到过关于 Spektrum 无线电设备出现问题的报告,因为这种设备的绑定过程比较复杂。这样就可以了:要绑定接收机和遥测模块(TM1000+AR8000 至 DX8),请将它们连接在一起(TM1000 至 AR8000)。在发射机关闭(DX8 关闭)的情况下,按下遥测模块(TM1000)侧面的小按钮,为接收机供电(插入锂电池,但不要插入 4 线连接)。接收器和遥测模块都将开始闪烁(如果不闪烁,则 TM1000 无效)。出现这种情况时,按住训练器/绑定按钮打开无线电,它就会绑定(至少保持 10 英尺的距离)。确保绑定时显示类似 "绑定 dsmx -- 带遥测功能的接收器 "的字样。如果第一次没有接收到遥测模块,您可能需要做两次。
检查电缆!信号线应在顶部,接地线应在底部。
最后,如果其他方法都不奏效,就试着缩小问题的范围。首先,检查接收机是否正常工作,将一个舵机插入您正在测试的输出端,确保其输出良好的信号。然后将一个已知良好的遥控通道插入 APM 输入通道,从 1 到 7,每次一个,看看是否有通道被读取。如果一些通道被读取,而另一些通道未被读取,则可能存在焊接错误或烧毁了一个或多个输入端。
如果仍然无法诊断出问题,请联系购买商店的客户支持。
我的旋翼飞行器飞得还行,但往往会向某一方向倾斜¶
确保旋翼飞行器的 CG(重心)位于正中。然后在平坦的地面上运行水平指令。(您也可以在无风(重要!)的环境中以自动微调模式飞行--任何风都会导致您所做的更改在四旋翼旋转 180° 时对您不利。按住摇臂约 20 秒,在自动微调模式下飞行约 45 秒。它会自动退出自动调整并正常飞行。(不用担心计算时间,只需等待闪灯进入任一模式)。
你 会 使用无线电俯仰和滚动微调,但记得在使用配置工具设置无线电时将其重新对中。我不喜欢在四边形飞行时对无线电进行微调,但绝对绝对不要对偏航进行微调。(四边形也容易受气流影响。除非安装光流传感器,否则它们需要不断修正。总有一天......)。
即使操纵杆位于中心,我的飞行器还是会向某个方向移动¶
无线电校准期间,RC 通道 1 和 2 微调参数值(用于滚动轴和俯仰轴)必须等于Mission Planner地面站中显示的摇杆中心位置 PWM 值。
要检查该参数,请启动Mission Planner地面站,连接并进入高级参数列表,记下 RC 微调 PWM (HS1_TRIM) 和 RC 微调 PWM (HS2_TRIM) 的参数。
现在在Mission Planner地面站中启动无线电校准功能,并打开遥控发射机。
在滚动杆和螺距杆居中的情况下,通道 1(滚动)和通道 2(螺距)PWM 的值应该与您上面写下的参数值相同。
如果没有,则重新校准无线电。
HS1 Trim 值必须与实时摇杆居中的 Roll 值相匹配,HS2 Trim 值必须与实时摇杆居中的 Pitch 值相匹配,否则(飞行)控制器会认为您的摇杆没有居中,而实际上是居中了。
确保旋翼飞行器的 CG(重心)处于正中。
然后在平面上运行水平仪命令。(按住解除按钮约 15 秒钟即可调用)。
您还可以在无风(重要!)的环境中使用自动微调模式飞行--任何风力都会导致您所做的更改在四旋翼旋转 180° 时对您不利。
按住摇臂约 20 秒,以自动微调模式飞行约 45 秒。
它会自动退出自动微调并正常飞行。(不用担心计算时间,只需等待闪灯进入任一模式)。
如果可能,请尽量避免,但如果有必要,您可以使用一些无线电俯仰和滚动微调器
切勿将任何无线电微调用于偏航。
当我起飞时,四边形飞行器总是想向右或向左偏航¶
这通常是由于机身失调造成的,要么是其中一个发动机略微倾斜,要么是重量平衡未居中。通常情况下,不良行为是四轴飞行器总是会偏航一定的幅度,一般在起飞时偏航 30-45 度左右,但会保持这个方向。这是因为调整失灵的四轴飞行器的机械不对称迫使其偏航,而极限是 AC2 的 PID 方程中的 P 项需要多长时间才能增长并停止偏航。
虽然您可以在Mission Planner地面站的 PID 配置屏幕中调整这些条件,但最好的解决办法是从源头上解决问题。目测每个电机,看看它或它所在的机械臂是否有轻微倾斜,如果有,将其弯回垂直位置。还要确保电池位于四轮装置的中心,载具的重心尽可能靠近 APM 板的中心。另外,最好重新进行电调校准程序,以防万一。
还要确保正转和反转螺旋桨安装在正确的电机上,如图所示 这里.
当我俯仰或翻滚时,四边形飞行器总想偏航¶
您的指南针可能需要校准。AC2 会在飞行时进行校准,以将电机的磁场考虑在内。您必须在飞行结束时解除电机,以便将校准保存到 EEPROM 中。通常需要 1-2 次飞行后,校准才会产生作用。
您必须将指南针与 GPS 结合使用。如果您禁用了指南针,请断开 GPS 连接,否则会出现随机偏航保持问题。
我的直升飞机飞得很好,但在盘旋时,电机臂却躁动不安地下垂¶
最有可能的原因是您的子弹头连接器。初始设置完成后,当您测试电机方向和电气连接时,我们建议您十分 建议您剪掉子弹头连接器,直接将电机导线焊接到电调导线上。这种方法可以防震,运行也更可靠。
如果您的电线焊接时没有使用子弹头连接器,而您仍然发现了这个问题,那么还有其他一些原因可能会导致这个问题。您的电机可能坏了:要么是轴承坏了,要么是轴严重弯曲。轴承坏了的电机需要更大的功率才能转动。在这种情况下,电调可能会切断电源以保护自己。或者是飞行速度太慢,导致马达失速。在电池和电机之间安装一个电流传感器,测试好电机和坏电机之间的差异。如果您发现坏电机的电流较高,请更换或修复它。
另一个可能的原因是 THR_MIN 参数的默认值 130 对电机或 ESC 而言太低。THR_MIN 参数控制将发送至电调/电机的最小油门,以确保它们在油门高于零时继续旋转。如果该参数过低,可能会导致电机瞬间停止,从而导致抽搐。请尝试将该参数提高至 150。应注意不要将该参数设置过高(例如 150,尤其是在大功率旋翼飞行器上)。

我的一个电机开始抖动,然后烧坏了!¶
电机在等待信号时通常会每秒左右抽动一次(通常会发出哔哔声)。这是正常现象。但有时,如果您没有遵守警告并断开四线信号电缆,重置电路板时它们可能会快速振动。这是一个罕见的问题,某些类型的电调可能会出现这种情况,因为它们不能很好地处理超出范围的信号(这是 Arduino 引导加载程序在启动过程中出现的问题,因此我们对此无能为力)。不过,只要遵循本手册中随处可见的警告建议,总是可以避免这种情况的!
当 APM 板插入 USB 时可以工作,但当它由遥控轨道(电调/Lipo)供电时则不能工作¶
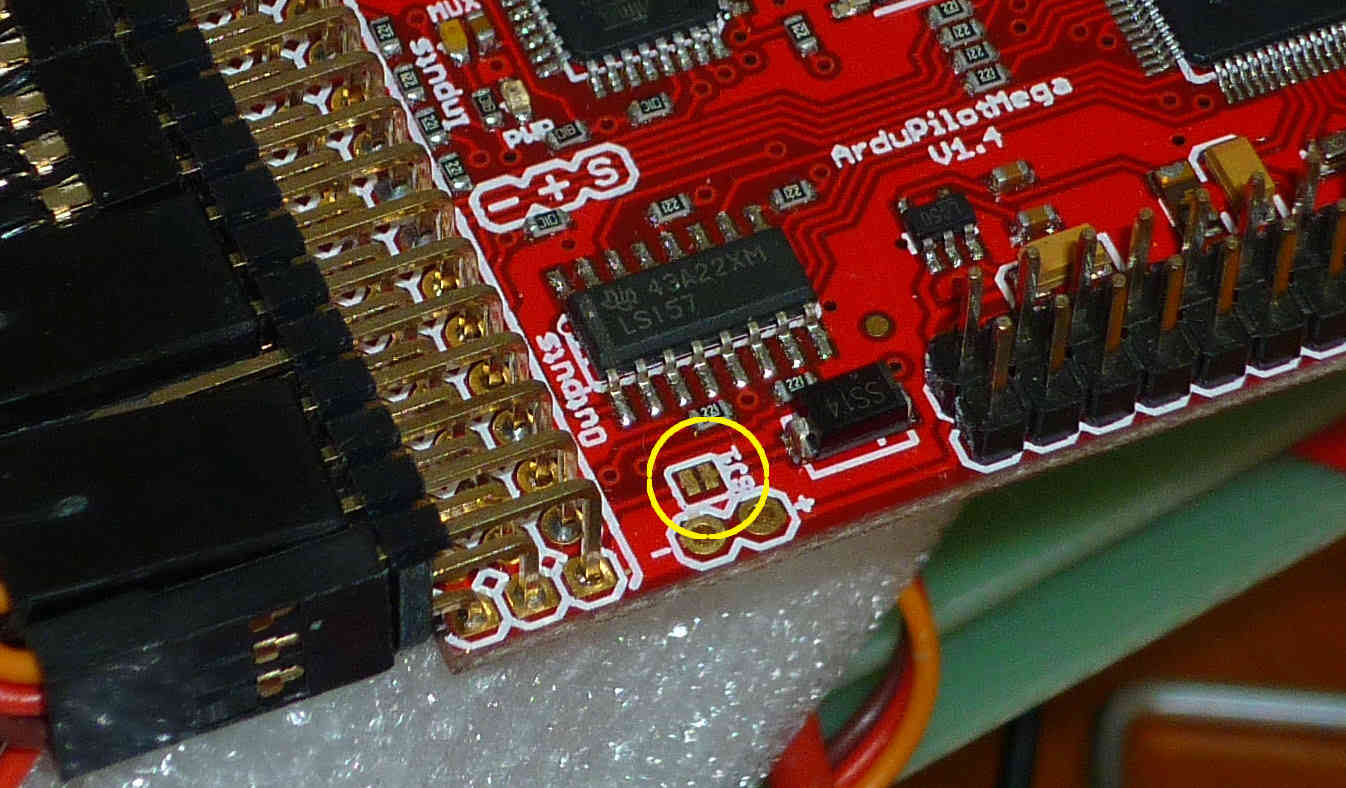
APM 允许通过 APM 的内置电源调节器提供 RC 电源或单独的电池,如前所述 这里.一个名为 SJ1 的焊接跳线决定使用哪一个。出厂默认情况下,该跳线应焊接在一起,这意味着 APM 将由 RC 轨供电。
如果由于某种原因,连接到 RC 轨的电源无法为电路板供电,请检查跳线是否已焊接。如果没有,如下图所示,只需在两个焊盘上焊上一团焊锡,将它们连接起来。
在Mission Planner地面站的 "原始传感器视图 "中,Z 加速计的读数总是 1000,而不是 0,当它在工作台上时是这样¶
这很正常。Z 加速计显示的是重力(你应该还记得高中物理中的加速度)。如果将四轴仪翻转过来,就会发现它反转了。
我无法通过 Xbee 与Mission Planner地面站连接¶
首先,请记住在插入 USB 电缆时不能使用 APM 2 的无线遥测功能(两者使用同一个端口)。请确保拔下电缆。
检查是否已将 Mission Planner 切换到为 Xbee 分配的 COM 端口(该端口与电脑相连),并将波特率设置为 57600。
确保已完成所述的全部 Xbee 配置过程 这里。 运行页面底部的测试代码,确保 Xbees 正在通信。 请记住,必须在 X-CTU 中对 Xbees 进行编程,才能以 57k 运行。
如果您的 Xbees 突然停止工作,可能是电缆松动导致信号故障,使机载 Xbees 出错。
我无法用 3DR 对讲机连接Mission Planner地面站¶
请记住,在插入 USB 电缆时,不能使用 APM 2 的无线遥测功能(两者使用同一个端口)。请确保拔下电缆。
检查是否已将 Mission Planner 切换到分配给连接到 PC 的 3DR 无线电的 COM 端口,并将波特率设置为 57600。
通过 USB 与 MAVLink 连接时遇到问题¶
仔细检查是否选择了正确的 COM 端口和 USB 波特率(115200)。还要在 Windows 设备管理器中仔细检查 APM 被分配到哪个 COM 端口。它将列在端口下。
您是否使用了安装驱动程序的 MP 安装程序?
您是否已将飞行固件(旋翼飞行器或飞机)加载到 APM?
您在 MP 中按了 "连接 "键吗?
飞行器电调不断发出蜂鸣声¶
我使用的是联发科 GPS,虽然模块的蓝色锁定 LED 灯亮起,但 APM 没有显示锁定,或者在Mission Planner地面站显示屏上显示 "无 GPS"。¶
我的遥测数据中也没有 GPS 数据。
解决方案
有几种情况可能导致这种情况。首先,确保 APM 的输入电压不是太高。电压范围应在 5-5.4v 之间。 不要以 6v 电压为电路板供电。
其次,确保在配置文件中选择了正确的联发科版本。如果您是在 2010 年 12 月之前从 DIY Drones 商店购买的模块,其固件版本为 1.0:在配置文件中选择 GPS_PROTOCOL_MTK。如果是在此之后购买的,固件版本为 1.6:在配置文件中选择 GPS_PROTOCOL_MTK16。
最后,如果仍然无法正常工作,请检查您的电缆。比 GPS 模块附带的短电缆更长的电缆线往往更细,容易断裂。
我根本无法锁定 GPS¶
首先要注意的是,您可能只能在室外获得 GPS 锁定(如果您非常靠近窗户,或者幸运地拥有强大的 GPS 信号和无线电透明屋顶,您可能可以在室内获得锁定)。冷启动(开机)需要三分钟或更长时间。如果您只是在锁定后按下重置按钮,则应该不超过一分钟。
如果几分钟后仍无法在室外获得 GPS 锁定(联发科模块上的蓝色 LED 指示灯一直闪烁),则可能是模块有缺陷。如果模块显示锁定,但 APM GPS 红色 LED 指示灯仍在闪烁,则要么是电缆坏了,要么是联发科模块的固件需要更新。
如果您使用的是 uBlox 模块,而 APM 未显示锁定,那么您可能没有从 DIY Drones 商店订购预先为 ArduPilot 编程的模块(您必须选择该选项)。在这种情况下,请按照以下说明自行编程 这里.
我想在 Arduino 中加载代码,但遇到了麻烦¶
首先,确保已下载最新的 AC2 代码,并使用最新的 Arduino(至少 022)。
如果出现编译错误,说明您还没有正确告诉 Arduino 库的位置。
如果在 Arduino 状态栏中显示 avrdude 同步错误信息),请查看 一应俱全 的提示 这里.
我的旋翼飞行器无法上升/起飞¶
如果您在将旋翼飞行器从地面升起时遇到问题,请检查螺旋桨的安装方式是否正确。
Official Copter 螺旋桨不是对称的,需要以正确的方式安装。如果您靠近中央安装孔,会看到一些小文字,上面写着 10x45 或 12x45。这些文字需要颠倒过来。
如果文字在下侧,您的旋翼飞行器就无法正常升降。
早期版本的 3D Robotics Copter 随机附带的螺旋桨质量也参差不齐,有些在载荷作用下会过度弯曲,从而降低升力。如果您有这些道具(黑色且比大多数道具更灵活),应更换为 APC 或同等道具,或联系 3D Robotics 进行更换。
我的飞行器在滚动轴或俯仰轴上感觉不平稳¶
在进行手动测试时,滚动轴和俯仰轴的响应应该完全一致或接近一致。如果其中一个轴的响应与预期不符,请检查 PID 设置,然后尝试重新上传固件。
固件上传可能会成功,但由于内部时序问题,有些代码编写不正确,这可能会导致您的 Copter 不稳定。
我有一架三旋翼旋翼飞行器,在偏航方面遇到了问题¶
请参阅提示 这里.
Mission Planner地面站的 HUD 显示屏会移动,即使我的旋翼飞行器是静止的¶
从 2.9 版开始,我们启用了使用 GPS 速度/加速度补偿离心力的功能。它应该不会在飞行中造成任何问题,但如果它让您感到不舒服,您可以通过Mission Planner地面站的高级参数列表将 AHRS_GPS_GAIN 设置为 0 来禁用它。 下面是一段视频 展示问题并解释问题发生的原因。
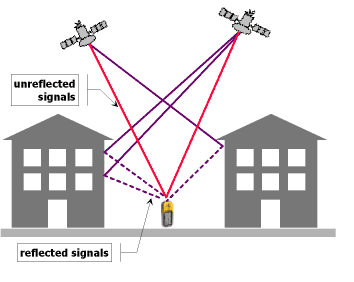
我的旋翼飞行器在 "任务规划 "地图上移动得很厉害,即使它静静地停在我的房子里。¶
在室内或靠近墙壁时,由于多路径干扰,GPS 很少能提供准确的位置。如果您走到室外,就会发现它已经稳定下来了。
在 Alt 保持或位置悬停状态下,我的旋翼飞行器非常颠簸,或者飞上天空¶
旋翼飞行器大量使用加速度计来计算高度和爬升率。电机的振动会导致加速度计的数值变得非常嘈杂,从而影响高度估计。解决方法是减少机架的振动源(弯曲的螺旋桨适配器和电机轴,用 APC 替换 EPP 螺旋桨),并使用减振产品(例如:APM)消除机架和 APM 之间的硬连接。 DuBro 泡沫塑料.
从 Copter 2.9 版本开始,惯性导航用于保持高度,在 2.9.2 版本中还用于保持水平位置,因此确实需要将振动降至最低。在(飞行)控制器的每个角落下垫一小块(1/2 至 1 英寸)Kyosho Zeal 胶带就能将振动降到最低。
或者,您也可以在(飞行)控制器每个角外侧 1/10 英寸处使用一个带有延伸螺钉的支座,并用四个直径适当的 1/16 英寸 O 形环将其悬挂起来,这样当通过(飞行)控制器折叠时,它们就能固定住电路板而不会移动,但也不会产生太大的张力。
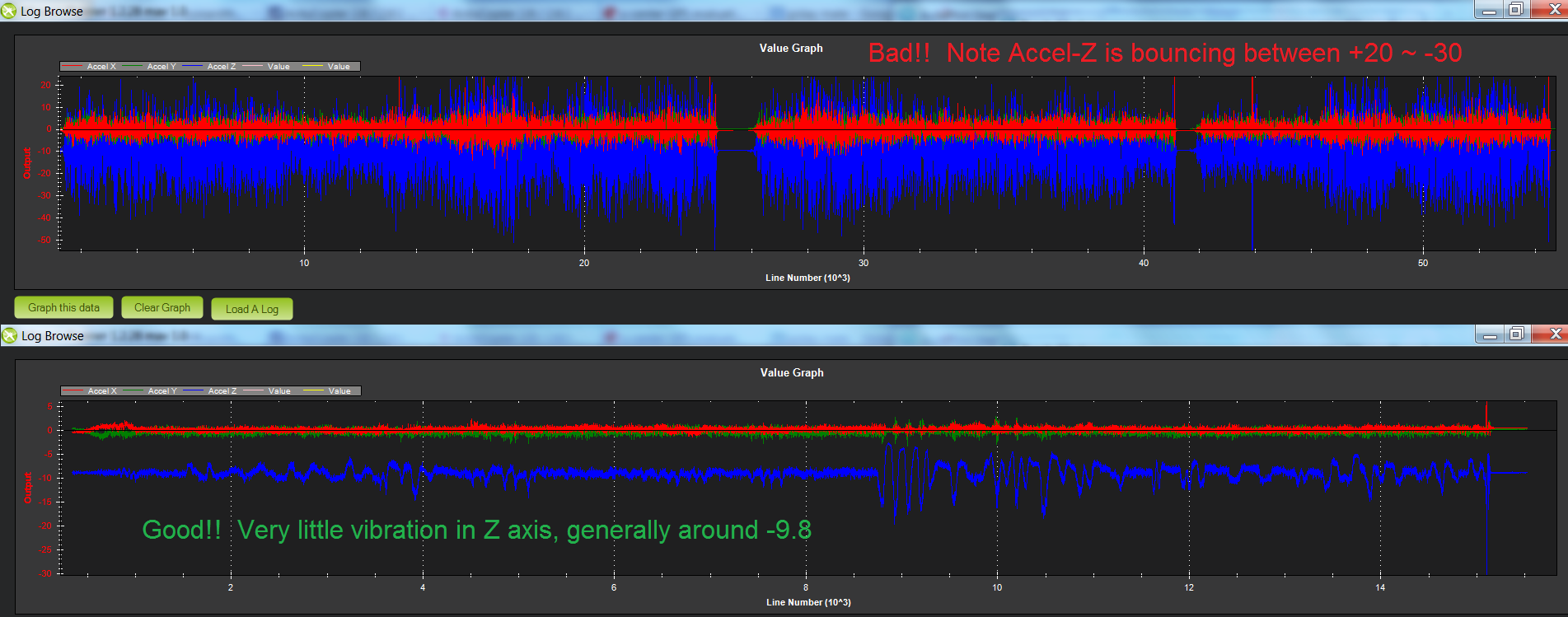
在 RAW 模式下检查飞行日志时,日志图上的 X、Y 和 Z 悬停加速度振动至少应在 + 至 - 5 的范围内,如果恰到好处,上述任何一种技术都可以将其降低到正负 1 的范围内。
您可以通过启用 "RAW "信息类型来绘制 Z 轴振动图。 数据闪存然后在 "稳定 "模式下进行短暂飞行,最后下载日志并用Mission Planner地面站绘制图表。下面是一个振动极其严重的飞行器(上图)和一个几乎完全平稳的飞行器(下图)的示例。Z 轴的上下振动不应超过 -5 至 -15,否则高度保持将无法正常工作。
有一个很好的讨论 这里 关于减震。
启用 Alt 保持或闲置时,我的旋翼飞行器会缓慢上升或下降¶
在高度保持或悬停模式下,油门死区为油门的 40% 至 60%。如果您的旋翼飞行器功率过大或过小,那么在稳定模式下,维持悬停所需的油门可能会超出这个范围。因此,当您启动高度保持或悬停时,您的油门会超出死区,而 Copter 会认为您想要爬升或下降。简单的解决办法是在启动高度保持时将油门移回中心。永久性解决方案是通过Mission Planner地面站的 "高级参数列表 "屏幕修改 THR_MID 参数。如果您的旋翼飞行器在稳定模式下以 40% 的油门杆悬停,则设置 THR_MID = 400。如果悬停在 60% 的油门杆上,则将参数设置为 600,等等。
Mission Planner地面站显示巨大的 "到家距离 "或 "到 WP 的距离"。¶
没有设置航点时,"Dist to WP"(到航点的距离)默认为-1。由于显示问题,Mission Planner地面站将负数显示为 65535。一旦进入位置悬停模式、更多引导或开始任务,它就会显示正确的数字。这一显示问题将在未来版本的 Copter 中修复。
与原点的距离 "是指与Mission Planner地面站原点的距离(与您启动发动机时设置的旋翼飞行器原点不同)。您可以点击飞行计划器屏幕上的 "原点 "链接,将Mission Planner地面站的原点重设为旋翼飞行器的当前位置。下面是视频解释和解决方法。
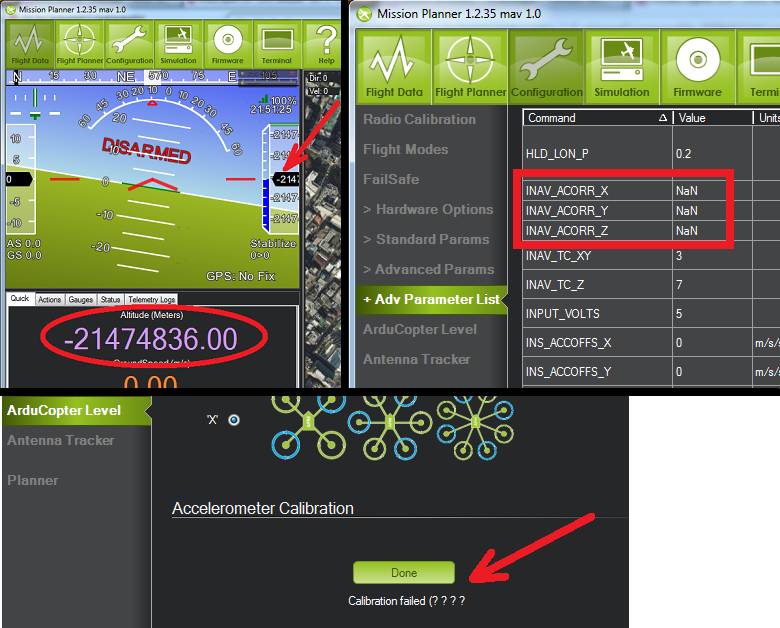
Mission Planner地面站显示高度为 -2100 万或高级参数列表中出现 NaN¶
在这种状态下,您不应尝试驾驶您的旋翼飞行器,因为 AltHold 将完全失效。您应该进入Mission Planner地面站的终端屏幕,输入 "setup"(设置)、"reset"(重置)、"Y"(Y),然后重启 APM,重新设置参数。
原因是 2.9.1 加速计校准例程中的一个错误,如果校准例程失败,该错误会将 NaN 保存到 AHRS AHRS Trim 参数中。这将反馈到惯性导航例程中,并导致Mission Planner地面站中出现奇怪的高度显示。注意:在尝试校准加速度计值后,您可能会看到 "校准失败 (????)"。