归档:提高多旋翼飞行器的性能¶
本页介绍了我们的一位会员(Euan Ramasy)高度先进的四旋翼摄影机。它展示了他为了更好地优化性能和实用性而进行的渐进式改进,同时也是一个极好的范例,说明如何根据自己的用途正确地开发和改进自己的旋翼飞行器。
备注
如果您刚刚开始使用 MulitiCopter,并且这是您的第一架 MulitiCopter,那您就找错地方了,请到这里来: 自制多旋翼飞行器.
旋翼飞行器升级目标¶
距离我建造第一架四轮摩托(当然是选择 APM)已经过去一年了,我决定在休赛期进行一下升级。
这项工作有四个目标:
更可靠
精简
减重
提高性能
更高的可靠性¶
增加了 40A 的电子调速器,使我获得了 15A 的超额电流(最大电流为 25A,实际电流为 30A)。
在 Spektrum 遥测系统偶尔发出电压过低的鸣叫后,用一个 5.5 伏的 BEC 更换了 5 伏的 BEC。
为 PDB 和电调重新布线,以提高射频性能
更换了 1 台听起来不太理想的发动机
电调现已升级(如果你能 "升级 "到 HobbyKing...:-)),并采用外置式冷却,安全性更高。
简约¶
电池电路数量从 3 个减少到 1 个。
使用新的 5.5V 和 12V BEC
废弃不必要的 LED。
我只保留了 4 台,以便在我不使用 FPV 的情况下定位。
但它们是脑立方的,而且是 非常 明亮!
所有东西都贴上标签
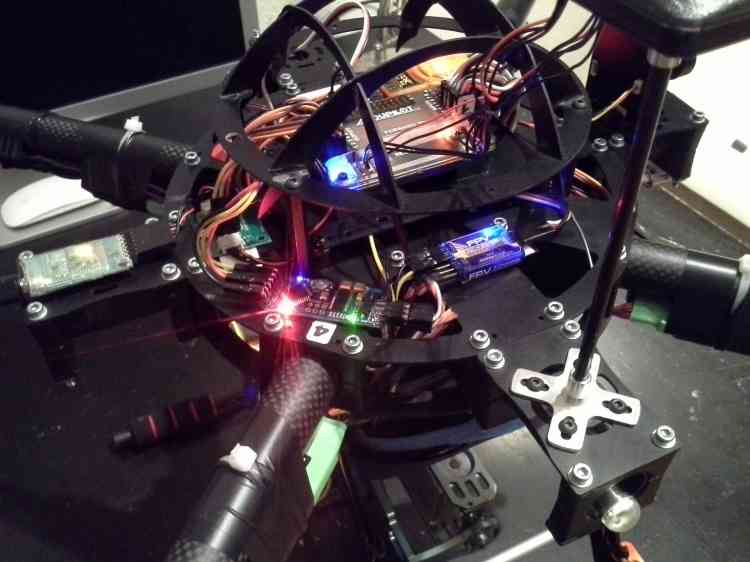
这是控制器:
减轻体重¶
电池电路从 3 个减少到 1 个。
用 minimOSD 取代 EzOSD。
图中还有:FPV 摄像机切换器和遥测接线盒。
废弃的 LED 电路
Spektrum 遥测技术 TM1000 已废弃
倾倒的 GPS 定位器
腿部组件更换为碳纤维
它有用吗?
起始重量:3.65 千克-> 最终重量:3.62 千克--因此节省的重量主要用于改进无刷云台。
如果我继续使用 quadframe 无刷发动机(拒绝使用 Martinez 板进行调试!),同时扔掉 Braincube,就能节省 200 多克。
性能¶
Moongel 换成了热情。不幸的是,振动实际上上升了!现在,我在大功率飞行和机动时都能达到 +/-5 的 "安全 "极限。
不过,它对非常小的命令的反应似乎要好得多。
zeal 比 moongel 更结实,所以我可能会想到这一点。
在 3.0.1 之后重新调整了 PID,增加了偏航控制,并减少了俯仰/滚动(仅减少 7%),以改善视频画面。
它仍然操控自如,但现在更像 "全顺",而不是 "考斯沃斯"。
对于我们的美国表亲来说,这句话的意思是:"它更像轻型卡车,而不是科尔维特")。
新增 6S 电流传感器。含义
Compassmot 现在可以在 CURRENT 而不是 THROTTLE 模式下运行。
飞行明显更准确,尤其是在 RTL、Loiter 中。
增加更高的 GPS 杆。
Compassmot 从 4% 降至 1%。
用 RCTimer 更换了 Quadframe 万向节。
视频质量立即得到改善。
原来的 Quadframe 无刷云台就是不肯调试,性能始终不佳。
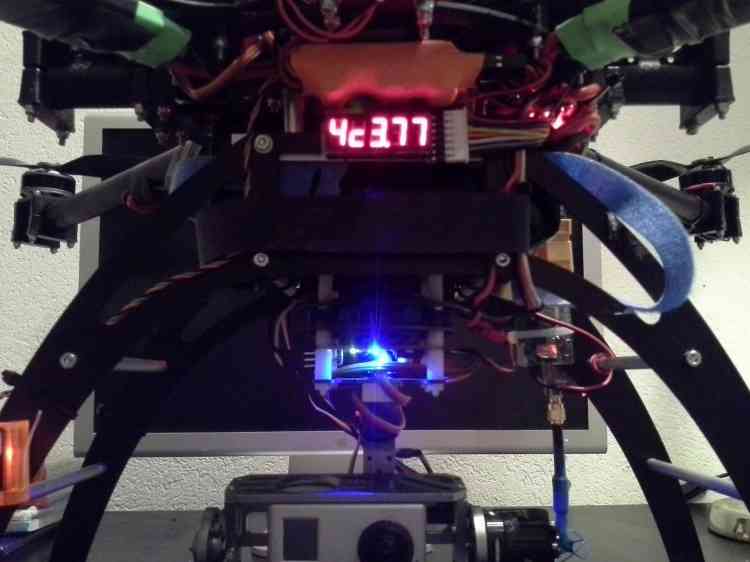
带 2 颗卫星的接收器¶
通过 Orangerx 800 (DSMX) + 2 颗卫星增加无线电分集。
每颗卫星都有一根 30 厘米长的电缆,一根安装在手臂下方最外侧,一根安装在腿部最下方。
虽然还不完美,但比以前好多了。现在,无论方向如何,无线电都更加可靠。不再有可怕的时刻了...

FPV 发射机改进:¶
视频 TX 移动到尽可能远的腿部。
使用 600mw tx + ibcrazy omni,射程从 350 米提高到 600 米以上。
由于我现在还有一个 ibcrazy 5 转螺旋天线可以使用,我将进一步推进。
还将有用于远距离遥测的 1/4 波长 433mhz 天线。
有多糟糕?视频还没播放就中断了...

相机云台支架¶
相机云台支架已进行过 3 次升级。
用 RCTimer 更换了 Quadframe 无刷万向节电机。
我用自己的设计替换了电池板,对此我很满意。
太高兴了,我要把它卖给任何想要的人。
我还更换了更坚固的滚珠轴承。
我的音调仍然有微小的抖动,但我可能需要检查一下输入马丁内斯的 Rx 信号,它可能有噪音。
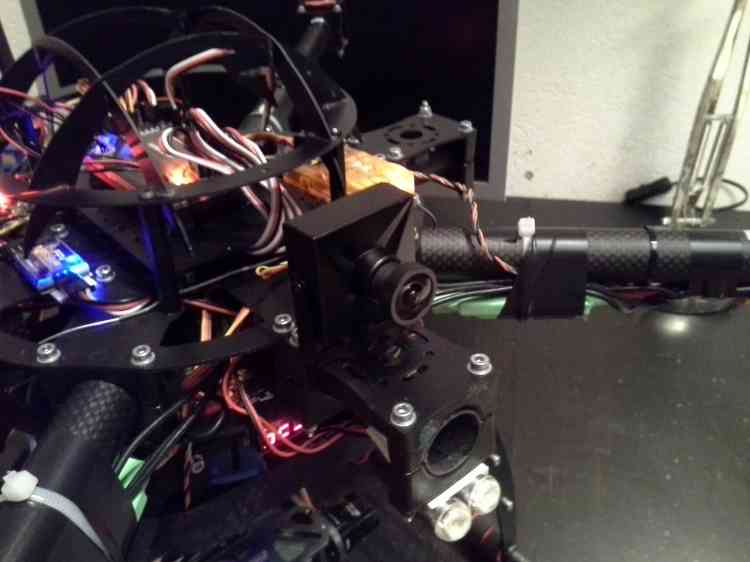
FPV 摄像机改进¶
最后,我放弃了 420 系列 FPV 摄像机,转而选择了 Security Camera 2000 的 650 系列摄像机(这是大家都喜欢的一款!)。
我还买了一些新的弱光镜头。
这样的设置效果更好。
可惜的是,由于某些原因,我无法让 minimOSD 叠加到馈线上;而在 Gopro 馈线上却能正常工作!
摘要¶
Euan 高度发达的 QuadCopter 作为无刷云台稳定摄影平台已经提供了出色的服务,并具有高度发达的 FPV 功能。
现在,他又做了一些改进。
相机支架已更换为更好的万向节、轴承和安装板。
FPV 现在有了更好的高分辨率摄像头和更好的镜头,FPV 的范围也扩大了。
通过卫星接收器扩大了遥控范围。
通过多次升级,可靠性进一步提高。
此外,还去掉了不必要的装置,简化了旋翼飞行器。
这应该能让您对建立一个专业平台所需的细节和努力有一定的了解。