高级飞行稳定调整¶
备注
本页已被取代,现已存档。
本文概述了如何调整各种 Copter 参数。
概述¶
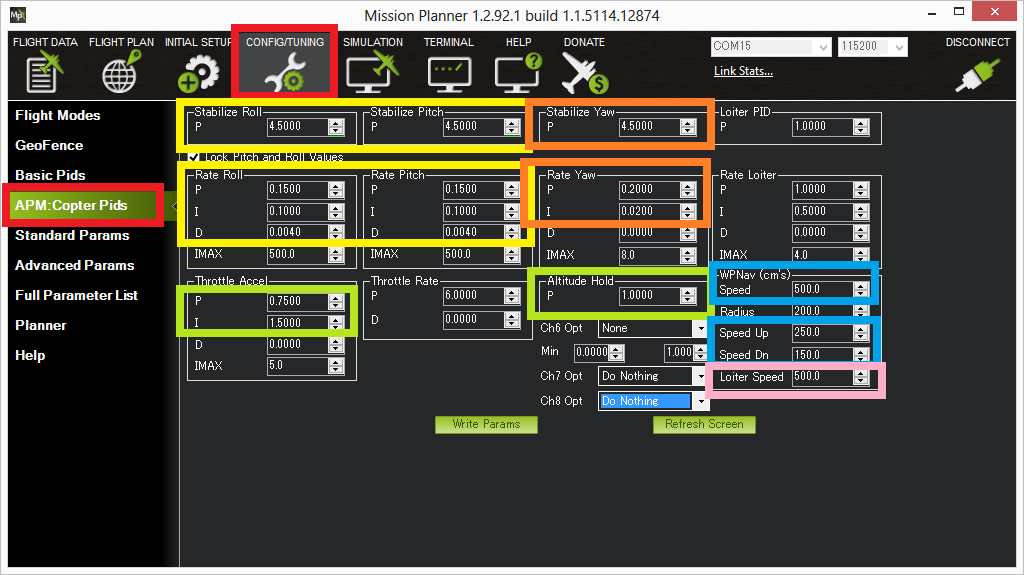
默认值 PID 增益 是为 3DR IRIS 设计的,尽管它们适用于多种框架。不过,为了获得最佳性能,您可能需要对它们进行调整。 Mission Planner地面站's 配置/飞行稳定调整 | 旋翼飞行器 Pids 屏幕。下面的屏幕截图显示了滚动/前平移/俯仰(黄色)和偏航(橙色)的最重要参数、 高度保持 (绿色)、 位置悬停 (粉红色)和 航点导航 (蓝色)。
最重要的参数是速率滚转 P(默认情况下速率俯仰 P 被锁定为相同的值),如下所述 这里.
通常情况下,最好先在 "稳定 "模式下调整 "滚转率/螺距 P",然后在 "高度保持 "模式下调整 "高度保持",接着调整 "着陆"(通常无需调整),最后在 "自动 "模式下调整航点导航性能。
备注
Dave C 的 AC2.8.1 飞行稳定调整指南 但自 AC2.8.1 以来,高度保持、着陆和导航发生了巨大变化,因此这些部分已不再有效。
滚动/音调¶
稳定滚动/俯仰和速率滚动/俯仰参数(在上图中以黄色标出)控制滚动俯仰响应。
最重要的是速率参数,它能将所需的旋转速率转换为电机输出功率。速率参数 速率滚动和螺距 P 飞行稳定调整页面 拥有最多的调试信息。
稳定滚转/前平移/俯仰 P 将所需角度转换为所需旋转率,然后将其输入速率控制器。
数值越大,旋翼飞行器对滚动/俯仰输入的反应越灵敏,数值越小,越平稳
如果设置过高,旋翼飞行器将在滚轴和/或俯仰轴上摆动
如果设置得过低,旋翼飞行器在输入时会变得迟缓
有关调整滚动和俯仰的更多信息,请访问 稳定模式页面的飞行稳定调整部分.
通过绘制以下图表,可以客观地了解滚动和俯仰的总体性能 数据闪存日志 ATT 信息是 "Roll-In(滚入)"与 "Roll(滚动)"和 "Pitch-In(前平移/俯仰)"与 "Pitch(前平移/俯仰)"。在稳定或 AltHold 模式下,"Roll"(即实际滚动)应紧跟 "Roll-In"。同样,"前平移/俯仰 "也应紧跟 "俯仰进场"。
另外,您也可以尝试使用 自动飞行稳定调整功能.
偏航调整¶
稳定偏航和速率偏航参数控制偏航响应,在上面的屏幕截图中用橙色标出。偏航很少需要过多调整。
与滚转和俯仰类似,如果 "稳定偏航 P "或 "速率偏航 P "过高,旋翼飞行器的航向就会摆动。如果它们过低,旋翼飞行器可能无法保持航向。
正如 稳定模式的飞行稳定调整部分,"...... ACRO_Y_RATE 参数根据飞行员的偏航输入控制旋翼飞行器的旋转速度。默认值为 4.5,当左右完全握住偏航杆时,将以每秒 200 度的速度旋转。数值越大,旋转速度越快。
高度调整¶
在上面的屏幕截图中,与高度保持相关的调整参数以绿色高亮显示。
高度保持 P 用于将高度误差(期望高度与实际高度之间的差值)转换为期望的爬升或下降速率。较高的速率会使飞机更积极地尝试保持高度,但如果设置过高,则会导致油门反应生涩。
节气门速率(通常无需调整)将所需的爬升或下降速率转换为所需的上升或下降加速度。
油门加速度 PID 增益将加速度误差(即预期加速度与实际加速度之间的差值)转换为电机输出。如果修改这些参数,应保持 P 与 I 的 1:2 比例(即 I 是 P 的两倍)。这些值绝对不能增大,但对于动力非常强劲的旋翼飞行器,将这两个值都减小 50%(即 P 减至 0.5,I 减至 1.0)可能会获得更好的响应。
参见 高度保持飞行模式页面 了解更多信息。
装载调整¶
一般来说,如果滚轴和螺距飞行稳定调整正确,则 全球定位系统 和 指北针 建立并运行良好,以及 振动级别 可以接受,Loiter 不需要太多调整,但请参见 位置悬停模式 页面,了解包括水平速度在内的可调参数的更多详情。
飞行中调试¶
参见 基于发射机的飞行稳定调整 页了解详情。
滤波器飞行稳定调整¶
旋翼机通常会受到振动的影响,因此调整各种可用的软件滤波器对于实现整体调整至关重要。关于如何调整现有各种带阻滤波器的指南可在 带阻滤波维基页面.
PID 视频介绍¶
PID(比例-积分-微分)是我们的固件用于持续稳定载具的方法
比例 = 即时修正:偏离越远,修正越大。
积分 = 长期或稳定状态修正:如果我们未能取得进展,则增加额外的修正。
Derivative = Take it Easy 校正:修正是否过快?如果过快,则应稍微放慢(减弱)速度,以避免超调。
