备注
该信息被以下内容取代 起落架/可伸缩相机支架
已归档:起落架¶
旋翼飞行器支持由伺服机构激活的可伸缩式起落架(如 业余爱好王).可通过辅助开关手动收放起落架。着陆时,齿轮也会自动展开。
除了响应控制器发出的缩回/展开指令外,还有一些简单的逻辑控制操作。如果系统启动时起落架控制开关处于收起位置,则起落架不会收起。这样做是为了防止起落架或机身在启动时意外处于收起位置。在这种情况下,起落架将不会收起,直到开关先移到展开位置,然后再移回收起位置。
当飞行模式更改为 "着陆"、在 RTL 模式的最后着陆阶段以及在 "自动 "模式下执行 "着陆 "命令时,起落架将自动展开。
备注
AC 3.3 中引入了对起落架的支持

连接到 Pixhawk¶
大多数伸缩式起落架只需要一根 PWM 电缆,连接到 Pixhawk 背面的一个 AUX 输出(AUX1 ~ AUX4)。

备注
信号线(通常为白色)应连接到最下面的 "S "针脚。
通过Mission Planner地面站进行设置¶
使用飞行Mission Planner地面站的完整参数列表(或同等工具)设置以下参数:
如果使用 AC3.5(或更高版本),设置为
SERVOn_FUNCTION 至 29"起落架",其中 n 是所连接伺服的编号(例如 servo9_function 用于 AUX1、 servo10_function 用于 AUX2 等)。如果使用 AC3.4.6(或更低版本),则设置为
RCn_FUNCTION 至 29"起落架",其中 n 是所连接伺服的编号(例如RC9_FUNCTION <RC9_FUNCTION>;用于 AUX1、RC10_FUNCTION <RC10_FUNCTION>;用于 AUX2 等)。lgr_servo_deploy <LGR_SERVO_DEPLOY>;- 展开起落架所需的伺服 PWM 值。lgr_servo_rtract <LGR_SERVO_RTRACT>;- 缩回起落架所需的伺服 PWM 值。
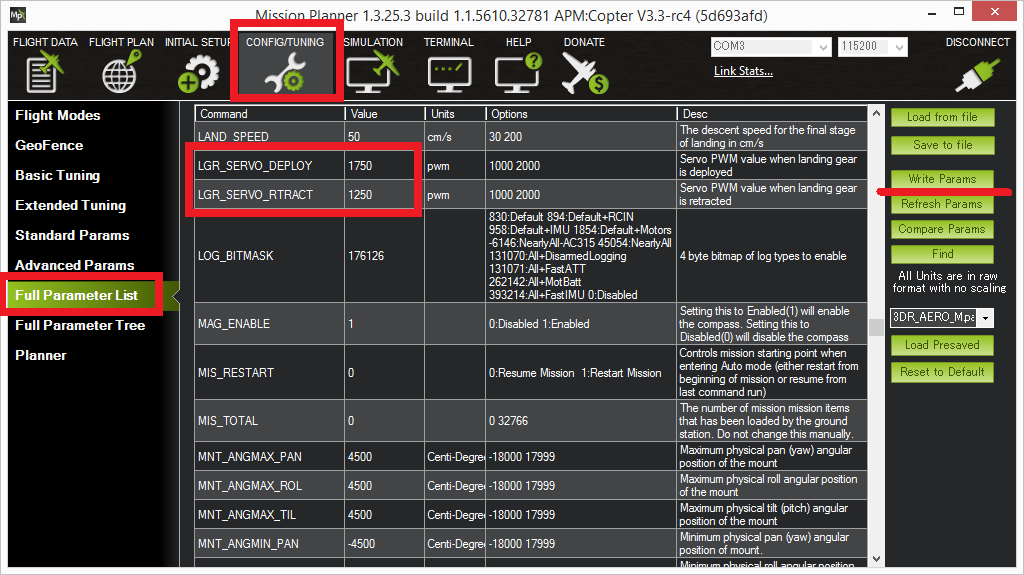
MissionPlanner:起落架配置¶
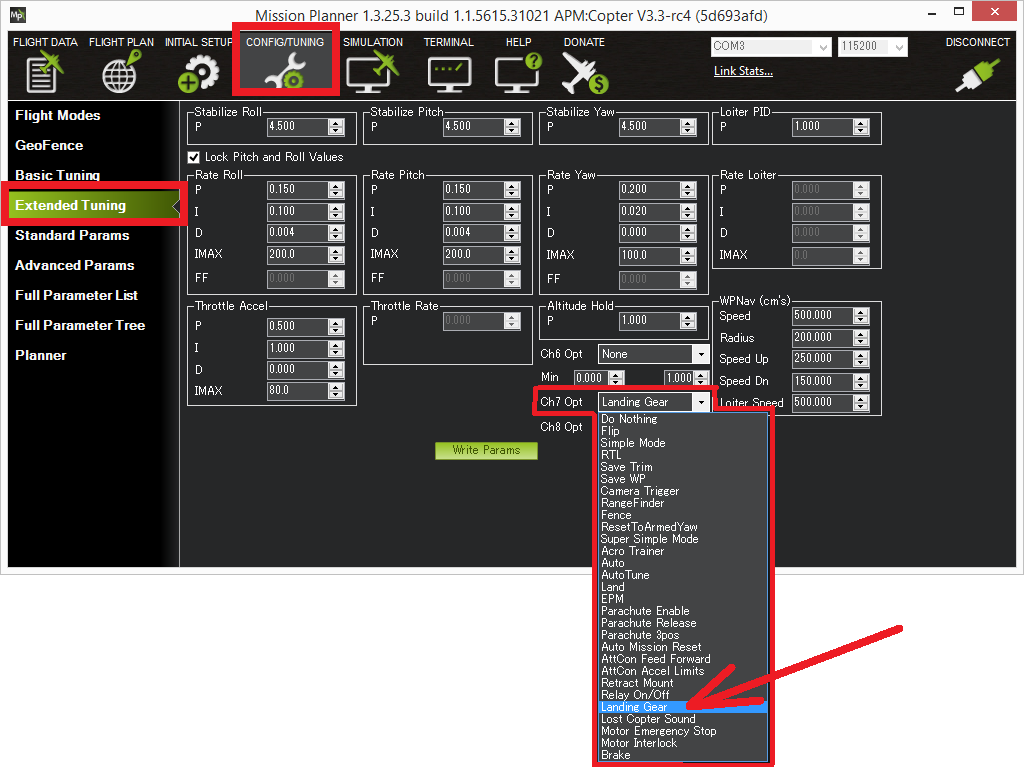
设置一个 辅助开关 到 "起落架",以启用手动控制(即 CH7_OPT 或 CH8_OPT 设置为 "29")。
当开关处于 "低 "档位置时,齿轮将展开,"高 "档将缩回,"中 "档为空档位置,不会改变齿轮的状态。
Mission Planner地面站:设置手动起落架控制¶