全方位 F4 Nano V6 和 V6.x¶
原创全能型 F4 Nano V6¶

V6.x 硬件修订版¶
以上图片和部分内容由以下提供 myairbot.com
备注
Copter-3.6.0 (及更高版本)支持该电路板
规格¶
处理器
STM32F405 ARM
传感器
InvenSense MPU6000 IMU(加速度、陀螺仪)
BMP280 气压计
电压传感器
接口
2 个完整的 UARTS(RX 和 TX)
1 仅用于 RX 的 UART,用于电调遥测
4 个 PWM 输出
RC 输入 PPM、SBUS、CRSF 等。
用于外部罗盘的 I2C 端口
USB 端口
内置 OSD
机载电压传感器
仅在 V6.x 版本上增加了用于电流传感器的 ADC。原版 V6 上的电流传感器可使用电调遥测功能。
机载 winbond 25Q128 用于数据闪存类型的日志记录
购买地点¶
可从多个零售商处购买,包括 myairbot.com
默认 UART 顺序¶
SERIAL0 = 控制台 = USB
SERIAL1 = Telemetry1 = USART1(仅适用于原始 V6 版本)
SERIAL2 = Telemetry2 = USART4(RX 仅用于 ESC 遥测)
serial3 = gps1 = usart6
SERIAL4 = USART3 可用在 BRD_ALT_CONFIG = 1(固件 4.1 或更高版本)
SERIAL5 = 未指定
SERIAL6 = 未指定
串行协议可根据个人喜好进行调整。
Dshot 能力¶
所有电机/伺服输出均可进行 Dshot 和 PWM 操作。然而,将输出的 Dshot 和正常 PWM 操作混合使用会受到组的限制,即如果要为组中的某个输出启用 Dshot,则需要将该组中的所有输出都配置并用作 Dshot,而不是 PWM 输出。在配置为正常伺服/电机输出时,输出组必须相同(相同的 PWM 速率或 Dshot):1/2 和 3/4。
记录¶
该控制器支持记录到板载数据闪存。
版本¶
OmnibusF4Nano 有多种版本和克隆型号。这里指的是最初的 V6 版本和随后的 V6.x 版本,仅带有板载 BMP280 型气压计。
电路板连接¶
原始 V6 版本¶
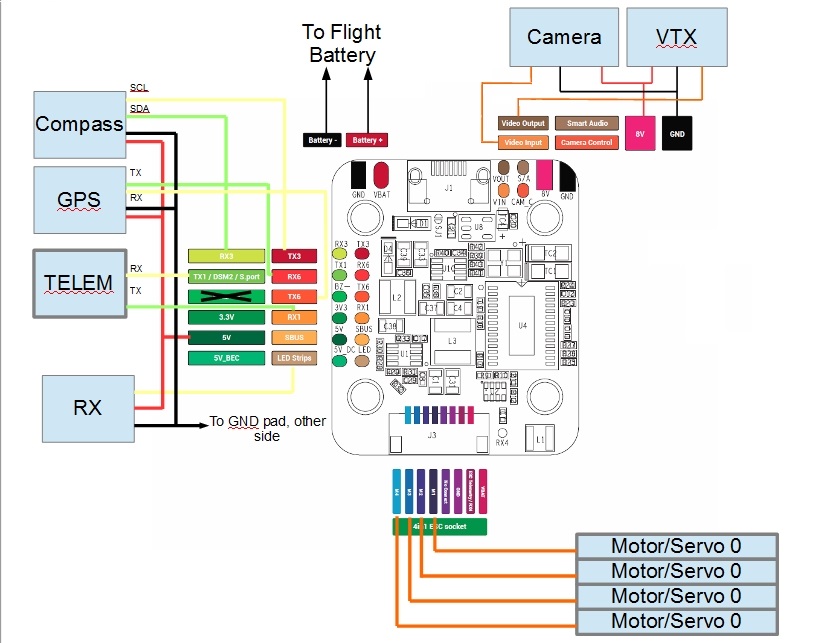
典型的 ArduPlane 系统
GPS 连接到 UART6
Telem 可在 UART 1 上使用
默认情况下,共享的 UART3/I2C 引脚已启用 I2C 操作。 BRD_ALT_CONFIG = 0,以便连接外部罗盘和/或数字空速传感器。另外,也可以将它们设置为 UART 操作,即 SERIAL4(串行接口 4)。 BRD_ALT_CONFIG = 1.
RC 输入通过电路板上标有 LED 的焊盘进行,兼容 ArduPilot 支持的所有 RX 串行协议。蜂鸣器输出焊盘没有任何功能。
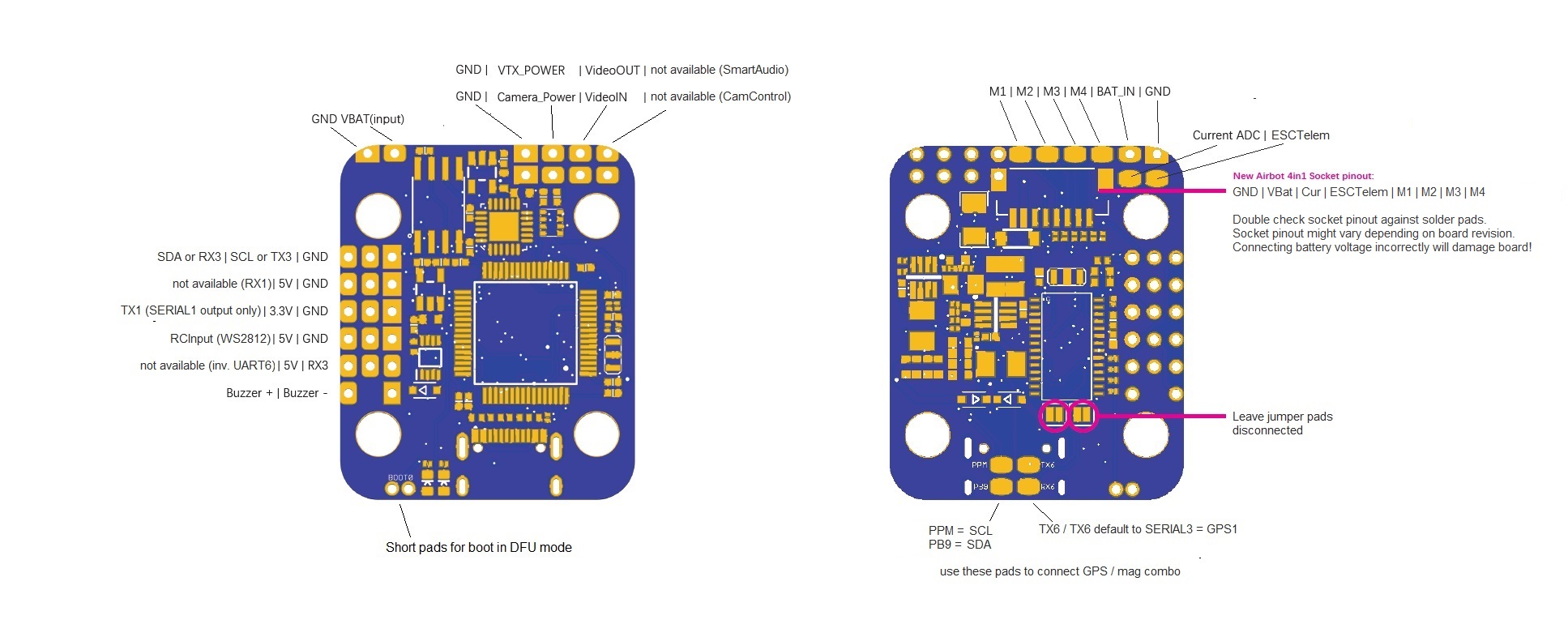
V6.x 修订版¶
备注
该电路板修订版将固定反相器移至 USART1 RX 引脚,因此只能使用 TX1 引脚(仅输出)。2 个完整的 UARTS + I2C 可用于 BRD_ALT_CONFIG = 1,将 RX3 / TX3 引脚用作 SERIAL4。默认情况下 BRD_ALT_CONFIG = 0 时,RX3 和 TX3 引脚将分别默认为 I2C SDA 和 SCL。RCInput 位于 WSL2812 焊盘上。用于 GPS / Mag 组合的 I2C 和 SERIAL3 位于 PPM (=SCL)、PB9 (=SDA)、RX6 和 TX6 焊盘上。确保将用于逆变器设置的焊接跳线断开。
电池监测¶
原 V6 版本¶
最初的 V6 版本支持 VBAT 引脚上的模拟电压监控。
设置 BATT_MONITOR 到 3(= 仅模拟电压)并重新启动。
默认引脚值:
BATT_VOLT_PIN = 12
BATT_VOLT_MULT = 11
可选择使用具有电调遥测功能的电调添加电压和/或电流监控功能。参见说明 这里.
V6.x 修订版¶
V6.x 版本有一个额外的 ADC,可用于外部电流传感器硬件/4in1 插座中的 PDB 连接/各自的焊盘。
BATT_CURR_PIN = 11
batt_amp_pervlt = 18.2
设置 BATT_MONITOR 至 4(= 模拟电压和电流),并重新启动以支持全面的电池监测。
备注
在 ardupilot 运行时,当前引脚默认为 11 号引脚。此外,它还可用于模拟 RSSI 输入或连接模拟空速传感器。调整 batt_amp_pervlt 根据所使用的各个电流传感器硬件的要求,默认值为 18.2。
刷新固件¶
通常,这些电路板在出售时已预先刷入 Betaflight / iNav 固件。要使用 ArduPilot,首次刷新需要同时更新引导加载程序和固件。随后的 ArduPilot 固件更新不需要再次更新引导加载程序。
第一次闪光¶
按照说明操作 这里 使用 "OmnibusNanoV6 "目标的 "arduXXX_with_bl.hex "文件。
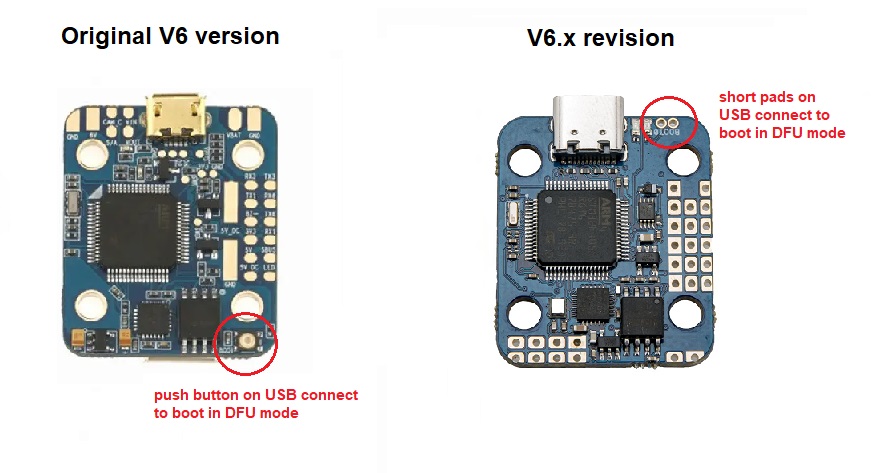
当指示进入 DFU 模式时,找到 DFU 按钮/跳线垫,并保持按下按钮/跳线垫短路,同时通过 USB 将电路板连接到电脑。如果操作成功,红色电源 LED 灯应亮起,而蓝色活动 LED 灯应完全不亮。
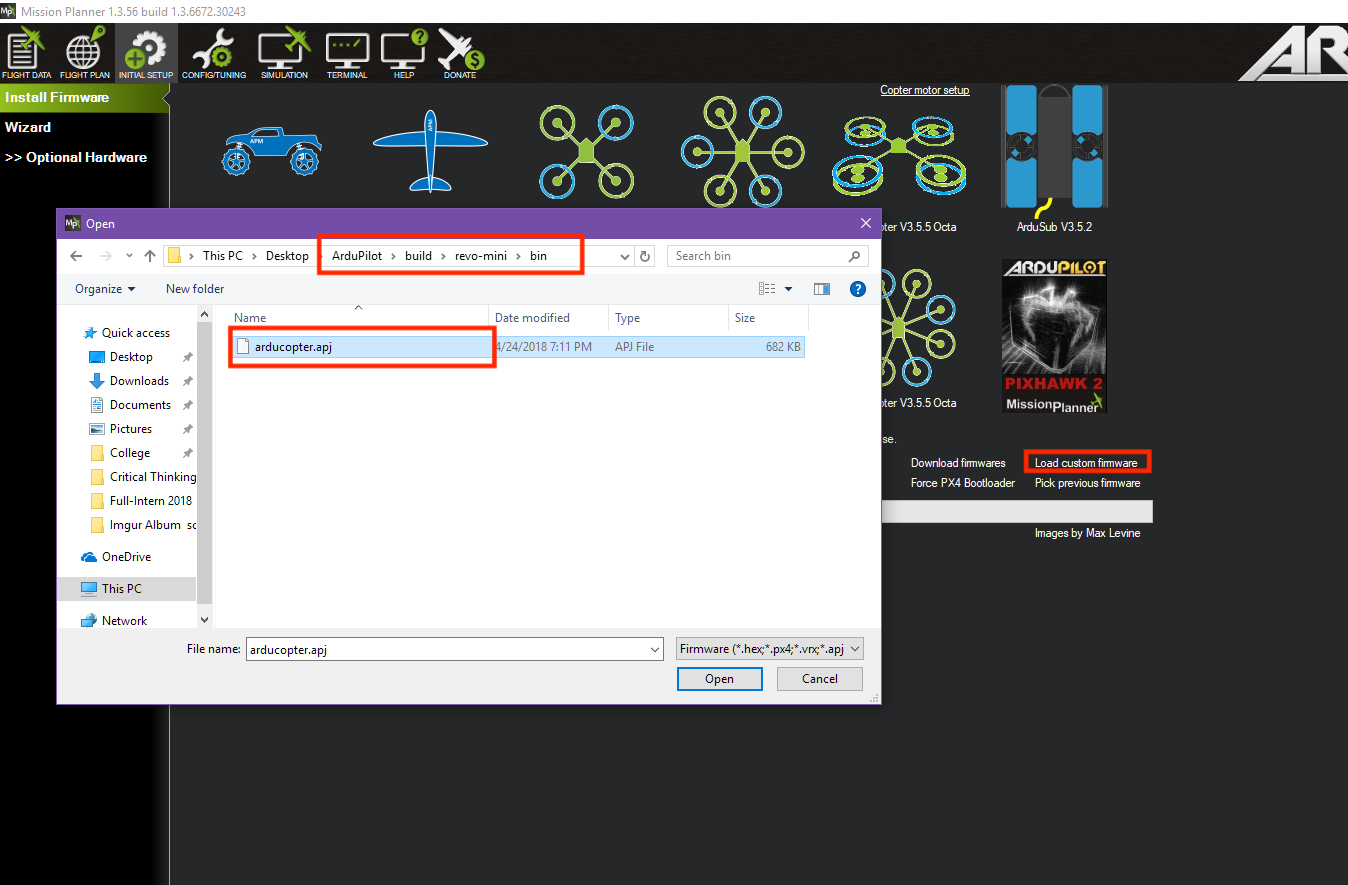
后续固件更新¶
按照说明操作 这里 但要选择 "加载自定义固件",然后浏览 "OmnibusNanoV6 "目标的相应 "arduXXX.apj "文件,如果要构建自己的固件,则浏览自己的 .apj 文件。
编译 ArduPilot¶
要构建自己的固件,请参阅有关设置构建环境和编译源代码的说明: 构建代码