3DR Solo(开发人员信息)¶
本页为使用 3DR Solo 即用飞行器的开发人员提供说明。全面的 点击此处查看 3DR 单人开发指南.
向 Pixhawk2 上传定制固件¶
独奏 可使用 ardupilot/master 进行飞行 但由 3DR 发货时,它运行的是 APM:Copter3.3 的修改版。
固件 可在此处的 Github 上找到.
编译指令与 Pixhawk 的主控 ardupilot 相同 但应使用修改后的 repos。
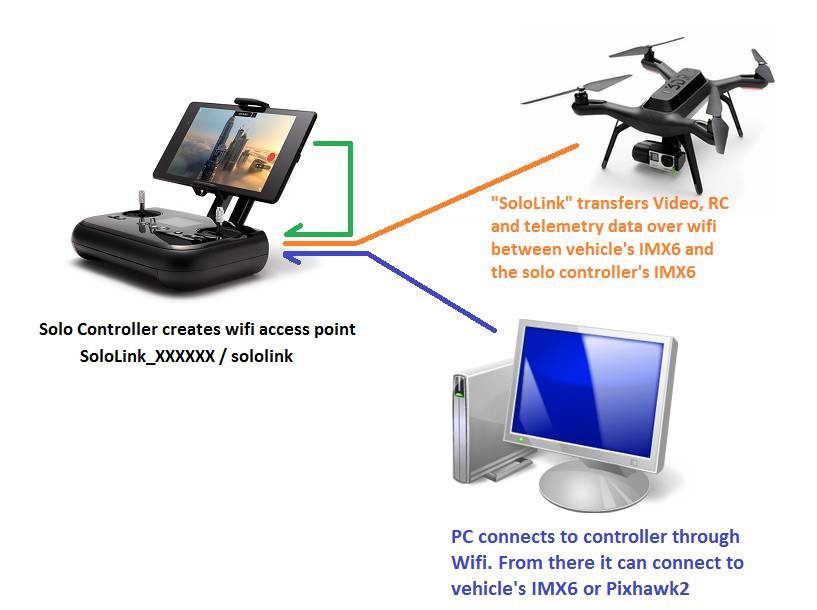
修改/构建固件后,打开 Solo,使用 Solo 应用程序使用的相同登录名/密码(默认情况下,这些登录名/密码类似于:
SoloLink_XXXXXX/sololink).使用 scp 复制 ArduCopter-v2.px4 从您的个人电脑将文件 root@10.1.1.10:/firmware (即 Solo 载具上 IMX6 的固件目录)。Windows 用户尤其需要安装 油灰 并使用类似下面的命令:
C:\产品~2\PuTTY\pscp.exe -pw SSH-密码 -scp ArduCopter-v2.px4 根基@10.1.1.10:/固件/
备注
SSH-PASSWORD 应替换为载具的实际 ssh 密码。默认根密码为 TjSDBkAu。
重新启动载具,载具的 IMX6 就会将固件加载到 Pixhawk2 上(在上传过程中,您应该会看到机械臂 LED 上出现常规的彩虹色)。
上传固件后,固件将被移至 /firmware/loaded 目录。
更改控制器模式¶
用 ssh 命令登录 artoo 中的 iMX6 板(ssh 根基@10.1.1.1)
vi /固件/cfg/棍子-cfg-evt.cfg:
模式 1:
throttle 棍子-本我 = 1, 导演 = 0 滚动 棍子-本我 = 2, 导演 = 0 沥青 棍子-本我 = 3, 导演 = 1 打呵欠 棍子-本我 = 0, 导演 = 0
模式 3:
throttle 棍子-本我 = 1, 导演 = 0 滚动 棍子-本我 = 0, 导演 = 0 沥青 棍子-本我 = 3, 导演 = 1 打呵欠 棍子-本我 = 2, 导演 = 0
方式 4:
throttle 棍子-本我 = 3, 导演 = 0 滚动 棍子-本我 = 0, 导演 = 0 沥青 棍子-本我 = 1, 导演 = 1 打呵欠 棍子-本我 = 2, 导演 = 0
复制 /usr/bin/runStickCal.sh 到一个名为 runStickMapper.sh
编辑 runStickMapper.sh 并替换:
棍子-卡.py /设计/ttymxc1
与
棍子-轴线-cfg.py /设计/ttymxc1 /固件/cfg/棍子-cfg-evt.cfg