平衡机器人如何工作¶
本节简要介绍平衡机器人的工作原理。平衡机器人是作为UGV无人车固件中的一个框架类实现的。
平衡¶
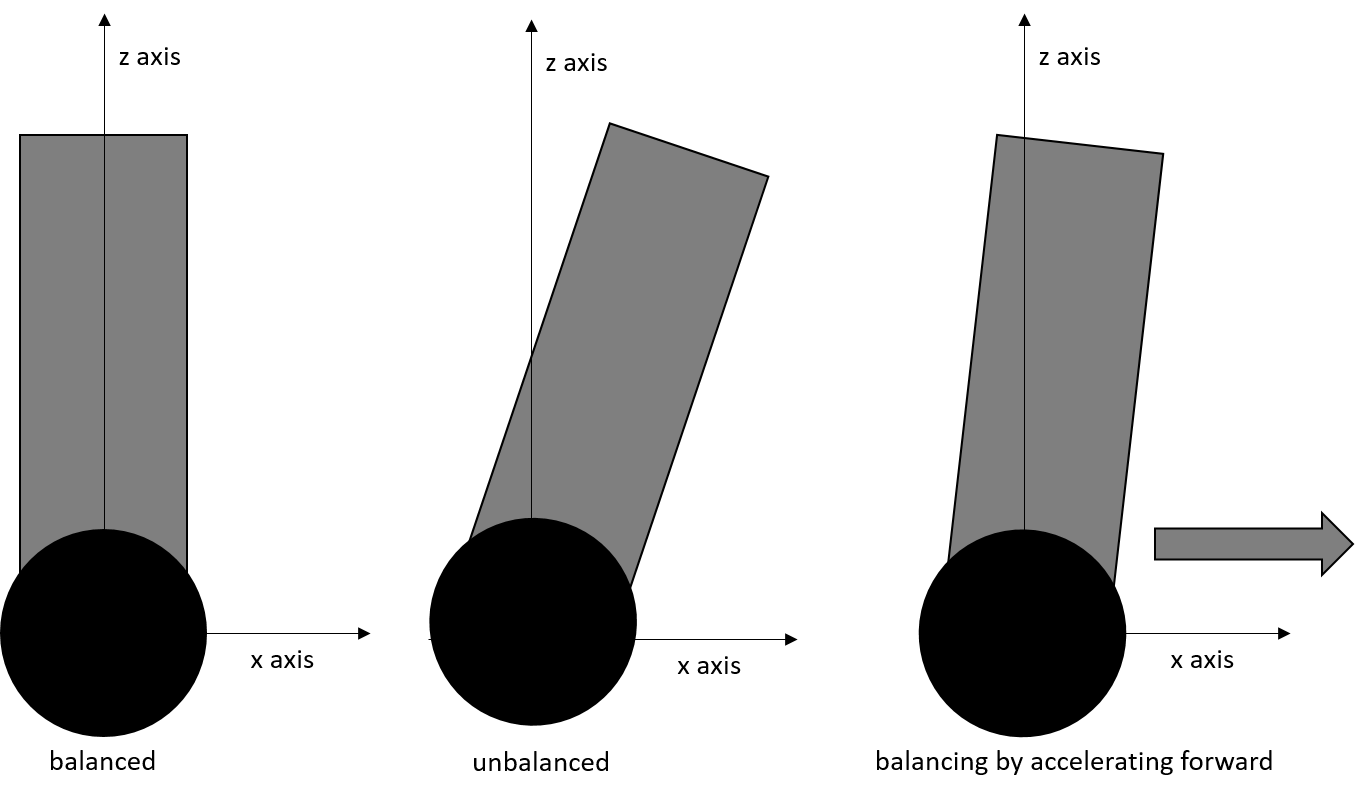
平衡机器人的俯仰轴本身就不稳定。如果飞行器不是完全垂直(例如俯仰角为零),重力会产生一个扭矩,导致飞行器沿俯仰方向倾倒。为了抵消这种情况,电机必须施加反向扭矩,使飞行器沿俯仰方向加速。

前平移/俯仰 PID 控制器用于计算将载具俯仰保持在所需角度所需的油门(例如,保持平衡而不向前移动的零油门)。
加速/减速¶
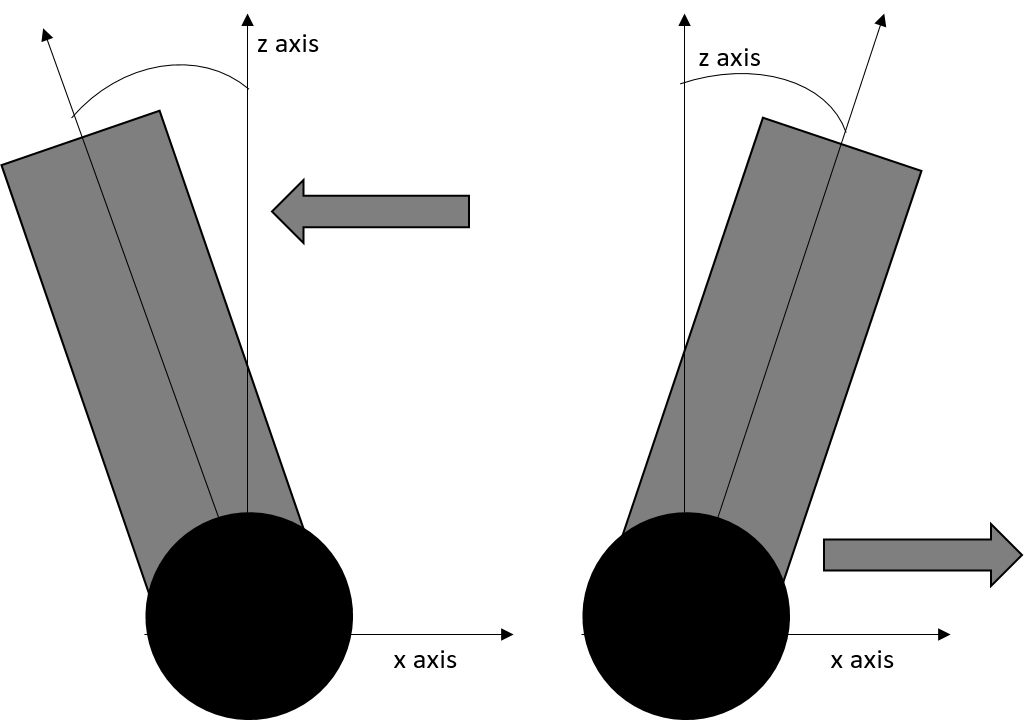
如前所述,当俯仰角不为零时,载具会被迫加速,以防止自己坠落。将这一想法向前推进,如果控制系统设置为使载具保持非零俯仰,那么载具在试图保持俯仰时将被迫持续加速。要向前加速,可以命令载具向前俯仰;要减速或向后加速,可以命令载具向后俯仰。
平衡机器人的试点控制¶
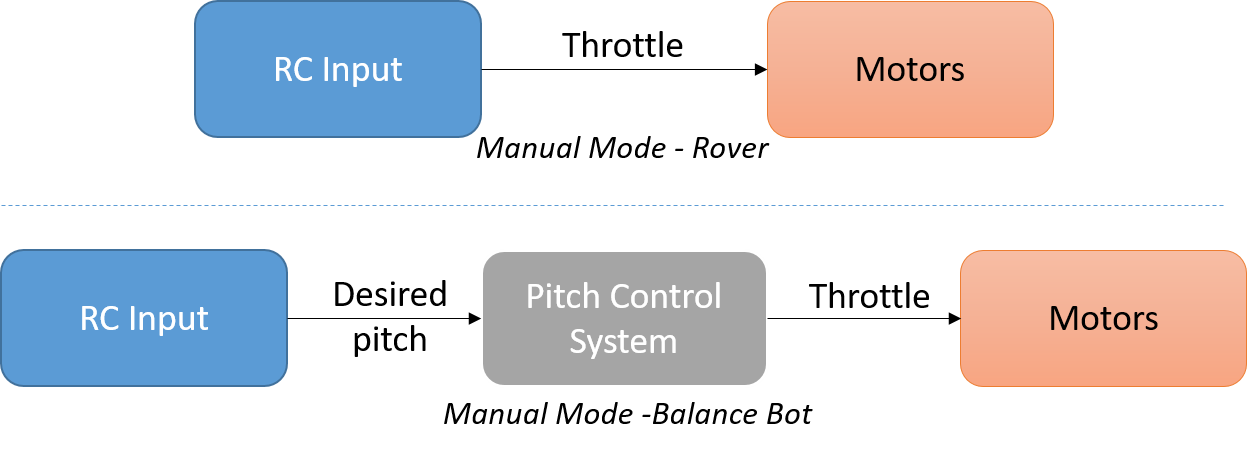
对于更常见的漫游车(例如非平衡机器人),在手动模式下,驾驶员可通过发射器的 Ch3 直接控制载具的油门输出(见下图顶部)。
不过,对于平衡机器人来说,飞行员的油门可以控制所需的俯仰角(最多可控制在 BAL_PITCH_MAX).然后,俯仰控制器计算油门输出,以保持载具处于所需的俯仰状态。
转向系统¶
平衡机器人只有两个轮子,因此使用滑动转向或差速驱动系统。转向是通过改变一个轮子相对于另一个轮子的速度来实现的。