平衡机器人控制模式¶
某些漫游车控制模式在平衡机器人中的工作原理略有不同。本节将解释在使用这些模式时需要注意的一些重要区别。有关任何模式的更多信息,请查阅 控制模式 罗孚的页面。
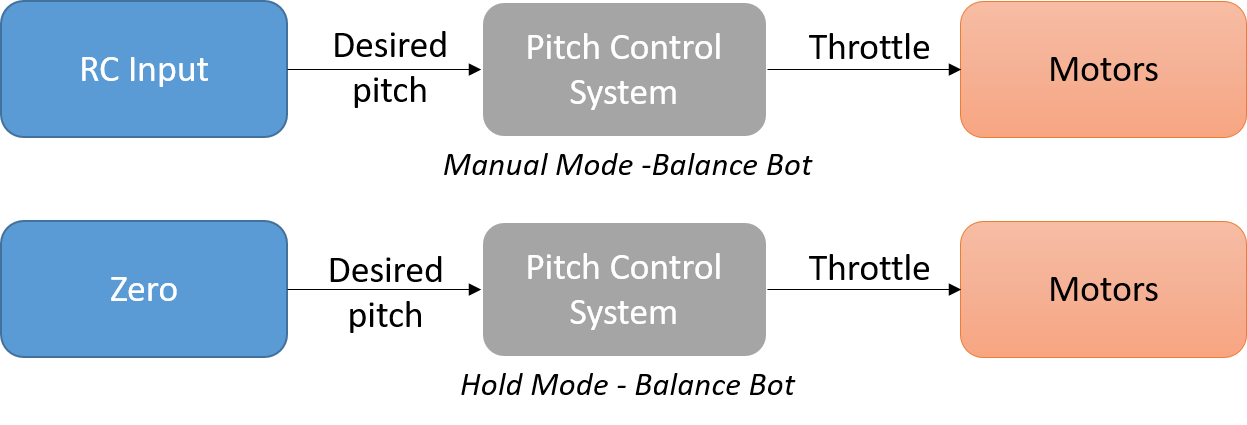
保持/手动¶
平衡机器人的保持和手动模式使用俯仰控制系统来控制和保持俯仰角。在保持模式下,输入控制系统的俯仰角设置为 0 度,以保持飞行器直立(相当于零油门输入)。在手动模式下,用户输入的油门被映射为俯仰角并发送至控制系统。控制系统反过来计算所需的油门,并将其发送给电机。正如 工作 部分,这会导致载具向俯仰方向加速。用户的转向输入与《UGV无人车》中的处理方式相同。
在手动模式下,当电机达到最大速度时,单向连续加速会使电机饱和。由于无法继续加速,载具将无法保持平衡。这就是平衡机器人在手动模式下运行的缺点。
在手动和保持模式下,我们只能控制飞行器的俯仰角,而不能控制速度。俯仰角为零(直立位置)但速度不为零也是可能的。要阻止手动模式下的载具漂移,必须使其反向俯仰。如果以非零初始速度(从 Acro 或 Auto 模式)进入这些模式,载具可能会加速并发生碰撞。
Acro¶
这是平衡机器人的推荐驱动模式。
Acro 模式可让您通过内部控制俯仰角来控制速度。另外,它还允许您控制转弯速度。

Acro 模式使用速度和转弯率控制系统。在UGV无人车模式中,Acro 控制系统的输出直接传送至电机。在平衡机器人中,速度控制器的输出被映射为所需的螺距,并发送至手动/保持模式中使用的螺距控制器。
引导/自动/RTL¶
所有这些模式都按照《UGV无人车》中的模式实施。不存在与平衡木特异之处。配置和使用这些模式的说明可在 UGV无人车控制模式页面.