高级指南针设置¶
本文就如何设置系统罗盘和与罗盘相关的高级功能提供高级指导。
提示
只有内置指南针或使用 UBlox GPS + 指南针组合的外置指南针的用户,例如 UBlox GPS + 指南针模块中的描述,通常可以执行简单的 "板载校准"。 罗盘校准).
概述¶
准确设置指南针至关重要,因为它是航向信息的主要来源。如果没有准确的航向,飞行器在自动驾驶模式(即自动、LOITER、PosHold、RTL 等)下将无法朝着正确的方向移动。这可能会导致盘旋(又称 "厕弓")或偏航。
ArduPilot 允许连接多个罗盘,但一次只能使用三个。通常只使用主罗盘,除非其读数与其他罗盘和/或其他传感器的读数存在一致性问题。在这种情况下,(飞行)控制器会自动决定使用前三个罗盘中的哪一个。
虽然许多(飞行)控制器都有一个或多个内部罗盘,但许多应用都会使用外部罗盘。由于与其他电子设备分离,外置罗盘能提供比内置罗盘更可靠的数据。参见 选择(飞行)控制器 有关特定(飞行)控制器的详细信息,以确定该(飞行)控制器可能有多少个内置罗盘(如有)。
大多数用户只需执行正常的 罗盘校准 但也详细介绍了较少使用的 CompassMot
罗盘设置¶
"这款" Mission Planner地面站指南针设置屏幕 可在菜单 设置 | 强制硬件 | 指南针 侧边栏中的该屏幕用于设置指南针排序、优先级、校准和使用。正常使用时无需进行其他设置。
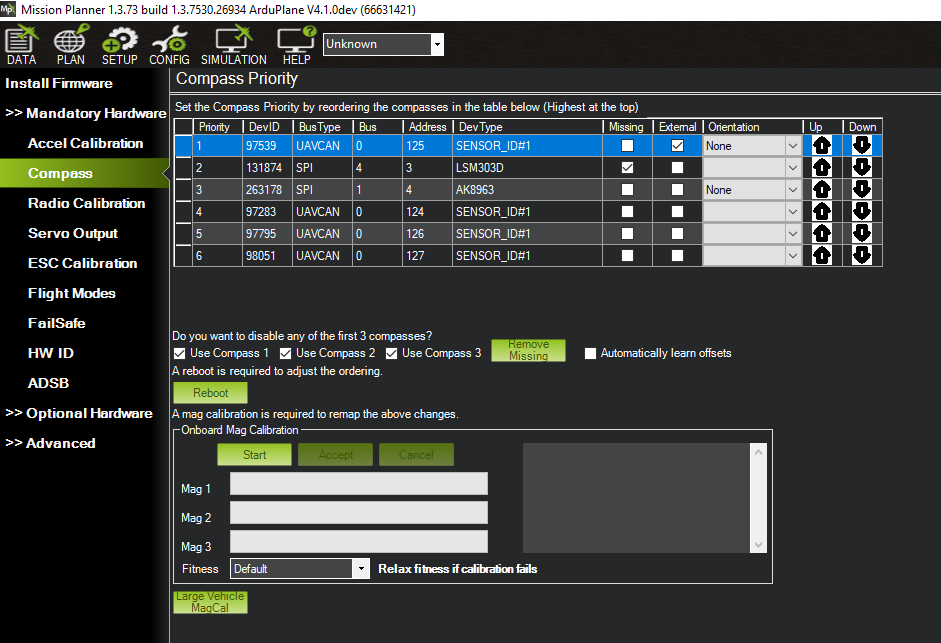
Mission Planner地面站:高级指南针设置和校准¶
指南针排序和优先级¶
在启动过程中,ArduPilot 会自动检测系统中存在的罗盘,将它们添加到一个列表中,并为前三个罗盘分配与其 DEV ID(DEV ID:DEV ID)相关联的优先级(1-3)。COMPASS_PRIOx_ID),根据它们被发现的先后顺序。该优先级决定 EKF 车道使用哪个罗盘。主罗盘(最高优先级,1)将被所有车道使用,如果主罗盘变得不健康,则会后退到前三个优先级中下一个可行的罗盘。
被发现的罗盘列表及其优先级在靴子中保持不变。
如果用户希望将三个优先级中的一个更改为不同的指南针,他可以更改 COMPASS_PRIOx_ID 到该罗盘的 COMPASS_DEV_IDx ID 值。如果 COMPASS_PRIOx_ID 设置为零时,罗盘将依次连续上移,以便在下一次重启时填补该优先位置。这可以在Mission Planner地面站中通过右侧的箭头轻松完成。
警告
永远不要改变指南针的 COMPASS_DEV_IDx 手动设置 ID 值,然后重新启动!
如果先前发现的罗盘在启动时丢失或未被检测到,并且位于三个优先位置之一,则会发生预触发故障,警告用户。用户需要将指南针从优先位置移除或纠正问题,以防止预上膛故障。Mission Planner地面站在上述屏幕上提供了一个移除未检测到的罗盘的按钮。
备注
校准过程中不存在或未检测到的罗盘将自动移除。
指南针使能¶
可以禁用前三个罗盘中的任何一个。这样(飞行)控制器就只能使用其余的罗盘了。如果您经常看到 "罗盘不一致 "的预报警信息,并且您确信外部罗盘已经校准,那么您可能希望禁用任何内部罗盘。
备注
旋翼飞行器/漫游车应始终启用指南针,但飞机可以禁用指南针(不建议,如果有的话)。
定向¶
"这款" 方向 必须正确设置,罗盘校准才能成功。此外 加速度计校准 应在罗盘校准之前完成。
不再需要设置外部罗盘的方向。它会在 罗盘校准 现在。可以禁用此功能,或者只报告指南针校准时确定的方向,使用 罗盘自动旋转 参数。如果磁场受到附近金属或其他干扰的影响,特别是在 45 度偏置方向上,方向确定可能会失败。如果已知罗盘安装在与加速度计成 45 度偏置的位置上,并且在罗盘校准过程中无法确定方向,则可将参数设置为 罗盘自动旋转 到 "3 "并重复校准,可能会成功完成校准。
不过,如果需要仔细检查指南针的方向,也是可以的:
当飞机通过所有轴线旋转时,每个罗盘的移动方向应相同,数值也应大致相同:
- 北半球:
Z 分量应为 积极的
当载具俯仰时,X 部分应 增加 价值
当载具向右滚动时,Y 分量应 增加 价值
- 南半球:
Z 分量应为 负面
当载具俯仰时,X 部分应 减少 价值
当载具向右滚动时,Y 分量应 减少 价值
其他参数¶
早期版本的 ArduPilot 未纳入世界磁场模型数据库,因此可能需要手动输入或通过飞行学习位置磁偏角。现在不需要了。此外,这还允许在长途飞行中不断更新偏角。
此外,在飞行中学习罗盘偏移量,而不是在地面校准,也是难以移动校准的载具的一种选择。但不建议使用,因为大型飞行器 MagCal 选项已经可用。参见 罗盘校准 页了解详情。
CompassMot - 补偿来自电源线、电调和电机的干扰¶
建议仅安装内部指南针的载具,以及电机、电源线等对指南针有明显干扰的载具使用。CompassMot 只有在以下情况下才能正常工作 电池电流监控器 因为磁干扰与电流成线性关系。从技术上讲,使用节流阀设置 CompassMot 是可行的,但不建议这样做。
请按照以下说明操作:
启用当前监视器(又名 电源模块)
断开螺旋桨,将其翻转过来,绕机架旋转一个位置。在这种配置下,当油门升起时,螺旋桨应将旋翼飞行器推向地面
固定好旋翼飞行器(也许用胶带),使其不会移动
打开发射机并将油门保持在零位
连接载具的锂电池
用 USB 电缆将(飞行)控制器连接到电脑上
打开 初始设置 | 可选硬件 | 指南针/电机校准 筛查
按下 开始 按钮

您应该能听到电调启动的蜂鸣声
将油门缓慢升至 50% ~ 75%(螺旋桨会旋转!),持续 5 ~ 10 秒钟
迅速将油门降到零
按下 完成 按钮完成校准
检查显示的干扰百分比。如果小于 30%,则指南针干扰是可以接受的,您应该可以看到良好的 Loiter、RTL 和 AUTO 性能。如果是 31% 至 60%,则干扰处于 "灰色区域",可能是可以接受的(有些用户可以接受,有些则不行)。如果高于 60%,则应尝试将(飞行)控制器移到更高处,远离干扰源,或考虑购买一个外置罗盘(或 GPS+ 指南针模块 (其中一些))。
自动偏移校准¶
警告
请勿将其用于 GPS 驱动的 YAW!即 偏航/航向 GPS(又称移动基线) 在 4.5.2 之前的固件版本中!
在 ArduPilot 4.0 及更高版本中,提供了自动偏移学习功能。偏移量 COMPASS_LEARN 参数决定该功能的工作方式。此功能针对高级用户,不建议使用。
如果设置为 3,则将在飞行过程中自动学习偏置并保存,然后将此参数重置为 0。
备注
设置 COMPASS_LEARN 不建议使用 1 或 2。这些模式已经过时,要么无法使用,要么仍在开发中。
程序 COMPASS_LEARN = 3 是:
设置 COMPASS_LEARN = 信息 "CompassLearn:初始化 "信息将出现在 MP 的信息选项卡上(不会以红字显示在 HUD 上)。
会出现 "坏指南针",但这不用担心。我们希望能在最终发布前让这种情况消失。
在任何模式下上膛并驾驶/飞行载具,转几圈后,MP 的信息选项卡上应该会出现 "CompassLearn: have earth field"(指南针学习:有土场),然后最终会出现 "CompassLearn: finished"(指南针学习:完成)。
备注
必须有 GPS 锁定和信号才能成功。确保 GPS 可以清晰地 "看到 "天空,并且没有任何障碍物阻挡 GPS 信号。
如果需要,您可以查看 COMPASS_LEARN 参数设置回零(您可能需要刷新参数才能看到),COMPASS_OFS_X/Y/Z 值也将发生变化。
使用 RCxOPTION 的 "指南针学习 "功能也可以唤起这种方法。它将在通道超过 1800uS 时激活,并自动完成和保存。
指南针错误信息¶
Compass Health:指南针至少有半秒未发出信号。
指南针偏差:在 EKF 解决方案中,罗盘航向与其他惯性传感器估计的航向不一致。点击Mission Planner地面站 HUD 上的 EKF 按钮将显示误差的大小。
罗盘未校准:指南针需要校准。
罗盘偏移高:罗盘偏移超过 600,表明可能存在磁场干扰。检查干扰源并尝试重新校准。
使用飞行日志完善校准参数¶
罗盘偏移、刻度、对角线,甚至电机补偿都可以通过分析工具从飞行器的飞行数据闪存日志中确定。