滚动、俯仰和偏航控制器飞行稳定调整¶
这些说明将教您如何调整飞机的滚转、俯仰和偏航响应。这是对新飞机进行的首次调整,因为其他所有操作都有赖于正确的调整。
提示
我们 十分 建议 使用 AUTOTUNE 执行滚转/螺距/偏航调整.如果您无法飞行,应使用本文中的说明。
备注
对于大多数飞机而言,Plane 中的滚动和俯仰控制器的默认值故意设置得过小。这是因为过小的数值会导致 ArduPilot 无法很好地导航且速度缓慢,但导致飞机坠毁的可能性较小。俯仰默认值还具有较大的 "I "增益,以弥补初始 CG 位置的不足。一旦通过 伺服自动微调根据以下说明,应将该值设置为 "P "增益的 1/5,并进行全面飞行稳定调整。
先决条件¶
以下指令假定
您的模型已微调
您已完成无线电校准
您已校准空速传感器
您已调平(飞行)控制器
您已将(飞行)控制器和发射机设置为能够选择 FBW-A 模式
您已在 HUD 上检查了俯仰翻滚角和偏航角,并确认它们与模型的旋转一致
地面检查¶
在地面上选择 FBW-A 模式
将模型机头向上旋转 - 您应该看到升降舵向下偏转
将模型机头向下旋转 - 你应该看到升降舵向上偏转
将模型向右滚动 - 你应该看到左副翼/升降舵上升,右副翼/升降舵下降。
将模型向左滚动 - 你应该看到左副翼/升降舵下降,右副翼/升降舵上升。
调平模型 - 控制面应接近中性。会有一点位移,但如果超过最大投掷量的 10%,则表明(飞行)控制器尚未调平或需要重新进行无线电校准。
在模型处于水平状态时,在发射机上输入左右滚动杆 - 控制杆的偏转方向应与手动模式下的方向相同。
在模型水平状态下,使用发射机上的上下俯仰杆输入,控制杆的偏转方向应与手动模式下的方向相同。
如果您已启用空速传感器,则朝气动导管前方吹气并观察 HUD。您应该会看到空速读数增加
飞行测试¶
理想情况下,您需要第二个人来完成这项工作--一个人驾驶飞机,一个人调整参数。要执行本程序的手动操作部分,您必须是一名熟练的遥控飞行员,或者有人可以帮助您。否则,您需要从 "初始评估 "的第 2 步开始,并更加谨慎地调整控制增益,小步增加。
初步评估¶
使用手动模式起飞,将微调和油门调整到巡航位置,使飞机以您可以接受的速度平直飞行。这通常会在 30% 到 60% 的油门之间,具体取决于您的模型功率有多大。
当飞机飞离您时,切换到 FBW-A。飞机应继续保持机翼水平飞行且高度相当稳定(可能会缓慢爬升或下降)。如果飞机想要翻滚或俯仰,但幅度很小,则说明模型的修整、(飞行)控制器水平或无线电校准出现了问题,您需要在进一步操作之前先解决这个问题。
如果模型开始摇摆,那么默认的
RLL2SRV_P值对您的模型来说过高(这种情况不太可能发生,但有可能发生),您需要立即切换回手动模式,并让您的助手将该值减半。RLL2SRV_P参数,然后再切换回 FBW-A如果模型开始游动,默认的
PTCH2SRV_P值太高(这种情况不太可能发生,但有可能发生),您需要立即切换回手动模式,并要求您的助手将PTCH2SRV_P参数,然后再切换回 FBW-A
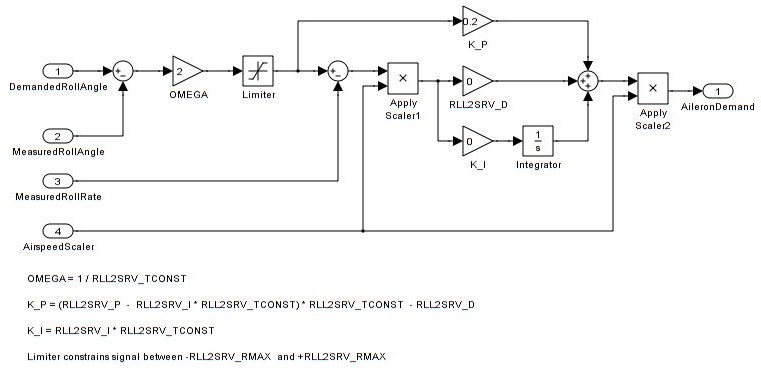
滚动控制飞行稳定调整¶
方法 1¶
这种方法最简单,但效果并不理想。对于熟悉调整旧式 PID 控制器的用户,可以使用
RLL2SRV_P, RLL2SRV_I 和 RLL2SRV_D 增益的效果相同,但高级用户还可以设置一些附加值。
在 FBW-A 模式下,通过将副翼操纵杆完全推向上方来实现快速倾角要求,保持几秒钟后松开。在另一个方向做同样的动作。您希望模型快速平稳地滚动到新的倾角,然后再返回,不会出现过冲或任何机翼 "摇晃"。如果滚转反应太慢,则逐步增加
RLL2SRV_P以 0.1 为增量,直到您满意为止。如果出现倾角摆动或过冲,则需要减小
RLL2SRV_P.如果此时您仍然没有得到足够的回应,那么您需要遵循方法 2。当您对滚动响应感到满意后,就可以慢慢增大
RLL2SRV_I为控制器提供一些 "I 增益",使其能够更好地应对风力。0.05 的值适用于大多数机型。如果在提高 I 值时出现过冲或振荡,则将其减半。
方法 2¶
这种方法可以获得更好的结果,但需要更加谨慎,因为步骤 2 可能会产生高频率的不稳定性,如果继续下去,副翼伺服器可能会过热。
在 FBW-A 模式下,按要求快速倾斜,保持并释放。在另一个方向也做同样的动作。您希望模型快速平稳地滚动到新的倾角,然后再返回,不会出现过冲或任何机翼 "摆动"。如果滚转反应太慢,则逐步增加
RLL2SRV_P增益以 0.1 为增量,直到对响应感到满意,或者开始出现倾角摆动或过冲为止增加
RLL2SRV_D以 0.01 为增量,直到开始振荡,然后减半。不要超过 0.1RLL2SRV_D着陆时不要检查舵机的温度,因为在极端情况下,调高增益会导致舵机快速移动,并使舵机过热,从而导致过早失效。现在开始增加积分器增益
RLL2SRV_I从默认值 0 开始,以 0.05 为单位减小,直到倾斜角开始超调或摆动,然后再减半。
飞行稳定调整技巧¶
选择任务计划飞行数据页面底部的调整框。地图上方会出现一个滚动的黑色窗口。在黑色窗口中双击,您将看到一个要绘制的参数列表。更改选择,直到绘制出滚转和导航滚转。导航滚动是需求,滚动是响应。您可以用它来查找过冲和其他从地面上看模型并不明显的行为。
检查 nav_roll 和 roll 之间是否有稳定的偏移。如果按照基本方法操作,可能会出现偏移,可以通过设置
RLL2SRV_I到一个很小的值(比如 0.01),这样控制环路就能缓慢调整副翼需求,消除稳定误差。虽然在超过最大副翼时(飞行)控制器会阻止积分器升高,但还可以通过以下方式提供额外保护
RLL2SRV_IMAX参数。该参数设置了积分器可以控制的最大副翼量(以厘度为单位)。默认值为 1500,允许积分器调整总副翼行程的 1/3。除非试图调整控制器以补偿系统故障导致的较大滚动偏移,否则无需更改该参数。通过设置滚动率限制,可以对最大滚动率进行约束,使模型更平稳地进行横移。 RLL2SRV_RMAX 参数为非零值。默认值 60 度/秒对大多数型号都很适用。将该参数设置为 0 会关闭速率限制器,并使调整变化的效果更容易察觉。如果该值降低过多,则滚转控制器无法跟上导航控制器的要求,从而导致飞机轨迹偏移和摇摆。
时间常数参数 RLL2SRV_TCONST 也可用于调整倾角达到要求值的速度。该参数的作用主要体现在对小阶跃滚动需求变化的响应上。对于较大的侧倾要求,侧倾速率限制 RLL2SRV_RMAX 往往会掩盖其效果。将该参数设置为较小值会使飞机在较短时间内达到所需的滚转角度,但前提是飞机具备相应的能力。反应非常慢的机身可能需要将该参数设置得稍大一些。
在调整窗口中绘制滚转速度。这显示了以弧度/秒为单位的滚转速度。1 弧度/秒的值约等于 60 度/秒(更精确地说是 57 度/秒),因此如果您有 RLL2SRV_RMAX 设置为 60 时,响应大倾角要求(例如从单向全倾角到反向全倾角)时的最大滚转速度应略高于 1.0。大于 1.1 表示
RLL2SRV_P值过高,应予以降低,而值小于 1 则表明RLL2SRV_P应该增加。
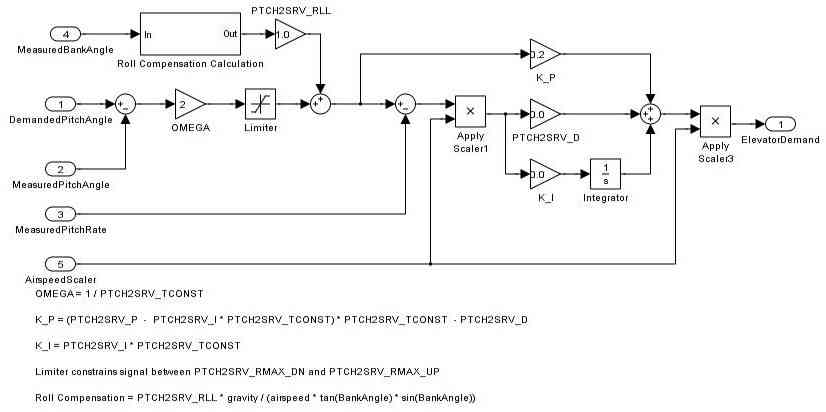
音高控制飞行稳定调整¶
方法 1¶
这种方法是最简单的,但不会产生最佳效果。对于熟悉调整旧 PID 控制器增益的用户来说,该控制器中的 K_P、K_I 和 K_D 增益具有相同的效果,但高级用户还可以设置一些附加值。
在 FBW-A 模式下,输入快速俯仰角要求,保持并释放。在另一个方向也做同样的操作。您希望模型快速平稳地俯仰到新的俯仰角,然后再恢复到新的俯仰角,而不会出现过冲或任何气泡。如果俯仰响应太慢,则逐步增加
PTCH2SRV_P以 0.1 为增量,直到您满意为止。如果出现俯仰角振荡或过冲,则需要减小
PTCH2SRV_P.如果此时仍没有足够的响应,则需要检查无线电校准、最小和最大俯仰角,并可能遵循方法 2。现在将模型向各个方向滚动到最大倾角。在转弯过程中,机头应保持在相当水平的位置,而不会明显增加或降低高度。在恒定油门下持续转弯时,预计会有一些高度损失,因为转弯时的额外阻力会使模型减速,从而导致轻微下降。如果模型在转弯过程中高度增加,则需要减小 PTCH2SRV_RLL 在默认值 1.0 的基础上以 0.05 的小幅度递增。如果模型在转向时立即下降(如前所述,模型在转向后期减速时出现轻微下降是正常现象),则增加 PTCH2SRV_RLL 在默认值 1.0 的基础上以 0.01 的小增量递增。如果需要更改 PTCH2SRV_RLL 如果参数超出 0.7 至 1.4 的范围,则很可能是先前的俯仰环调整、空速校准或(飞行)控制器的倾角估计出了问题。
方法 2¶
这种方法可以得到更好的结果,但需要更加谨慎,因为步骤 2) 可能会产生高频率不稳定性,除非迅速恢复到手动操作,否则可能会对平面造成过大压力。
执行方法 1 中的调整步骤
增加
PTCH2SRV_D以 0.01 为增量,直到开始振荡,然后减半。不要超过 0.1PTCH2SRV_D着陆时不要检查舵机的温度,因为在极端情况下,调高增益会导致舵机快速移动,并使舵机过热,从而导致过早失效。现在开始增加积分器增益
PTCH2SRV_I从默认值 0 开始,以 0.05 为单位递增,直到俯仰角开始超调或振荡,然后减半。
飞行稳定调整技巧¶
选择任务计划飞行数据页面底部的调整框。地图上方会出现一个滚动的黑色窗口。在黑色窗口中双击,您将看到一个要绘制的参数列表。更改选择,直到绘制出俯仰角和导航俯仰角。Nav_pitch 是需求,而 pitch 是响应。您可以用它来查找过冲和其他从地面观察模型时不那么明显的行为。
检查 nav_pitch-roll 和 pitch 之间是否存在稳定的偏移。如果您按照基本方法操作,可能会看到偏移,可以通过设置
PTCH2SRV_I到一个很小的值(如 0.05),这样控制回路就能缓慢地调整升降舵需求,以消除稳定误差。该值为PTCH2SRV_I可以以 0.05 的小增量增加,直到您对控制环路 "重新修整 "的速度感到满意为止。虽然(飞行)控制器会在超过最大升降量时阻止积分器升高,但还可以通过以下方式提供额外保护
PTCH2SRV_IMAX参数。该参数设置了积分器可以控制的最大升降量(以厘度为单位)。默认值为 1500,允许积分器最多调整升降舵总行程的 1/3。对于大多数机型而言,这应该足以满足微调偏移和微调随速度变化的需要。警告:如果
PTCH2SRV_IMAX如果设置得太高,那么在 FBW-A 模式下,如果模型已经调平,零俯仰角过高,无法以安全速度滑行,那么积分器将继续增加升降舵以维持所需的俯仰角,直到模型失速。PTCH2SRV_IMAX应设置为一个足够大的值,以允许调整变化,但又要足够小,以免飞机失速。Plane 的默认值是总投掷量的 2/3,这可能会产生这个问题。请确保 稳定俯仰 设置为在稳定模式下低油门时增加负螺距。用于修正俯仰角误差的俯仰速率(以及因此而减少的重力加速度)可通过设置俯仰速率限制来加以限制 ptch2srv_rmax_dn 和 ptch2srv_rmax_up 将这些参数设置为非零值。将这些值设为 560 除以空速(米/秒),可得到约等于 +- 1g 的限制。
时间常数参数 ptch2srv_tconst 也可用于调整螺距角达到要求值的速度。该参数的作用主要体现在对要求螺距小步变化的响应上。对于较大的螺距要求,螺距速率限制 ptch2srv_rmax_dn 和 ptch2srv_rmax_up 往往会掩盖其效果。将该参数设置为较小值会使飞机在较短时间内达到所需的俯仰角,但前提是飞机具备相应的能力。响应速度非常慢的机身可能需要将该参数设置得稍大一些。
在飞行稳定调整窗口中绘制 pitch_speed 图。这显示了以弧度/秒为单位的音高速率。1 弧度/秒的值约等于 60 度/秒(更精确地说是 57 度/秒),因此,如果您有 ptch2srv_rmax_dn/UP 设置为 30 时,响应大俯仰角要求(例如从单向全俯仰到反向全俯仰)时的最大俯仰速度应略高于 0.5。大于 0.6 的值表明
PTCH2SRV_P值过高,应予以降低,而小于 0.5 则表明RLL2SRV_P应该增加。
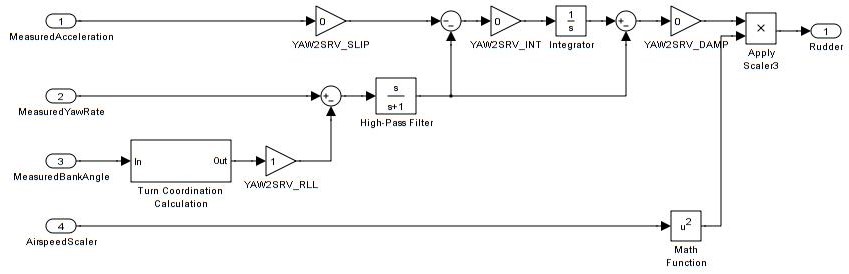
偏航控制器调整¶
偏航控制回路既可以配置为简单的偏航阻尼器(适用于鳍面积不足的模型),也可以配置为偏航阻尼器和侧滑控制器的组合。由于侧滑控制使用的是测得的侧向加速度,因此它只适用于那些机身侧面积足够大的模型,以便在侧滑时产生可测得的侧向加速度(一个极端的例子是特技飞行模型做刀锋动作时,所有的升力都由机身产生)。机身细长、机翼会飞的滑翔机无法使用这一功能,但只要有偏航控制装置(方向舵、差动气闸等),仍可从偏航阻尼器中获益。
调整偏航阻尼器¶
验证 YAW2SRV_SLIP 和 YAW2SRV_INT 增益项设为零,则
YAW2SRV_RLL增益项设置为 1.0,而 YAW2SRV_DAMP 增益项设为零现在迅速将模型从一个方向的最大倾角滚动到相反方向的最大倾角。在每个方向上各做几次,观察模型的偏航运动。如果当机翼通过水平面时,机头的偏航方向与翻滚方向相反(例如,当从左侧倾角翻滚到右侧倾角时,机头指向左侧),那么就增大 KFF_RDDRMIX 直到偏航消失。请勿使用大于 1 的值。
增加 YAW2SRV_DAMP 0.05 的小增量,直到偏航角开始摆动。出现这种情况时,尾翼会出现 "摇摆"。将增益从导致摆动的值减半。
现在,将模型向两个方向滚动入弯和出弯。如果模型在转弯时有向外侧偏转机头的趋势,则增大 YAW2SRV_RLL 增益项的默认值为 1.0,增量为 0.05。反之,如果模型在进入转弯时有向转弯内侧偏转机头的趋势,则应减小 YAW2SRV_RLL 增益项的默认值为 1.0,增量为 0.01。如果您必须超出 0.7 至 1.4 的范围,则说明有其他问题需要解决,您应该检查是否正确执行了步骤 2),如果使用了空速,则检查空速校准。
调整侧滑控制器¶
先调整偏航阻尼器
在Mission Planner地面站中调出调整图窗口,绘制横向加速度曲线。
将模型从全倾角向各个方向快速滚动,并观察横向加速度。如果侧向加速度为零,并且在滚入或滚出弯道时没有变化,则无需进行侧滑控制。此时即可结束。
设置 YAW2SRV_INT 增益项为 1.0。如果这会导致偏航角摆动,则将增益从导致摆动的最小值减半。
如果发现 y 加速度偏移或在转弯时出现尖峰,则应逐步增大 YAW2SRV_SLIP 以 0.5 为增益步长,直至误差消失或偏航角开始振荡。如果出现偏航摆动,则将增益从引起摆动的值减半。
控制器概述¶
滚筒控制器¶
螺距控制器¶
偏航控制器¶