飞行稳定调整快速入门¶
本文提供的信息可帮助您开始机身调试。其中包括对主要步骤、工具和概念的概述。
如何调整机身¶
通过默认的 PID 设置,Plane 可以安全地飞行大多数轻型遥控飞行器(非全尺寸、全速飞行器)。要想在风中飞行良好、导航精准、性能可靠,您需要调整(飞行)控制器。
最重要的配置是滚转和俯仰调整,因为这对反应灵敏、飞行稳定和有效导航至关重要。调整滚转和俯仰的最佳方法是使用 使用 AUTOTUNE 自动调整 (一种飞行模式,利用飞行员输入的飞行姿态变化来学习所需的键值)。
提示
要使用自动调整功能,您必须能够驾驶飞机。大多数轻型遥控飞机开箱即可飞行。我们还提供 许多常见飞机的配置值 在进一步调试之前,您可以用它让飞机飞起来。
如果您的飞机无法使用自动调整功能,请参阅 "如何使用自动调整功能"。 手动滚动、俯仰和偏航控制器飞行稳定调整指南 或 此处用于 4.1 之前的固件版本.
在调整了 "左平移/横滚"、"前平移/俯仰"(可选偏航)之后,您应该使用 TECS 飞行稳定调整指南 以及使用 L1 控制器飞行稳定调整指南.
有关如何调整 Plane 其他方面的信息可从 调整登陆页面。
Mission Planner地面站配置屏幕¶
备注
本节仅适用于 4.1 之前的固件版本。本节今后将针对 4.1 及以后的版本进行更新。您可以配置新参数(请参阅 手动滚动、俯仰和偏航控制器飞行稳定调整指南直接在Mission Planner地面站 CONFIG->Full Parameter List(全参数列表)选项卡中进行设置。
"这款" Mission Planner地面站 通过 CONFIG/TUNING 部分可访问所有配置和飞行稳定调整参数。左侧栏链接到完整的参数集。右侧屏幕列出了一些(但不是全部)更常用的修改参数。您可以在任意一侧进行相同的参数修改。按下 "写入参数 "键后,参数更新会立即发送到所连接的电路板上,许多参数会立即影响当前的飞行(如果有的话),并被写入永久存储,以便在电源循环后继续使用。
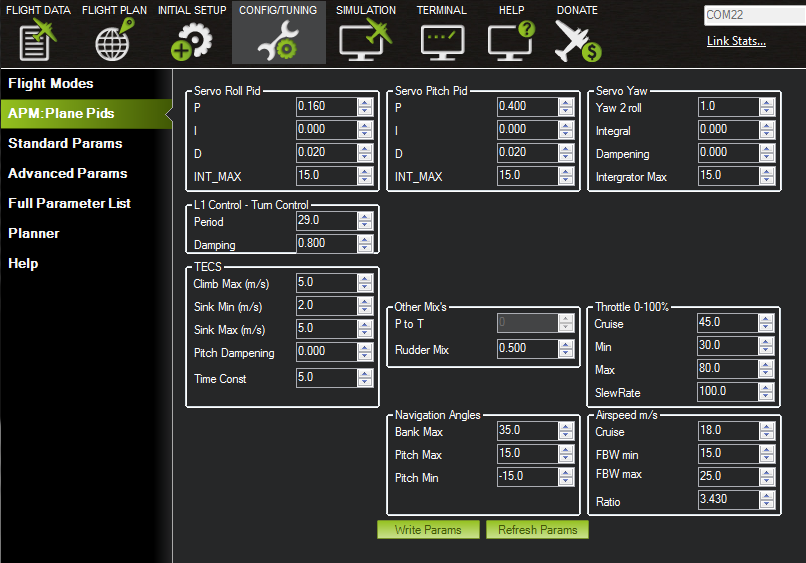
Mission Planner地面站:CONFIG/TUNINGPlane Pids 屏幕¶
飞机调整的起点是上图所示的飞机 PID 屏幕。在这里您可以调整舵机滚转和舵机俯仰 PID 增益,以便在 FBWA 模式下飞行,还可以调整 L1 控制以获得更精确的水平定位。
您还可以从 高级参数 屏幕配置文件是有版本号的--如果参数版本号不是最新的,Plane 找到的旧参数文件将被忽略。
您会注意到其中几个参数是 PID(比例、积分、微分)设置,下一节将对此进行解释。
PID 增益值¶
滚转角或俯仰角的控制通过一个 比例-积分-微分 (PID) 控制器.
应用于飞机控制面的最终控制是四个增益值效果的组合:
比例增益 (P) 是最简单的控制形式,是 "当前 "误差。(飞行)控制器想要 10 度俯仰,但只有 5 度,即误差为 5:应用一定量的升降舵(误差量的应用量由 P 数决定--按比例)。
积分增益 (I) 会考虑之前的误差,并能补偿稳定的误差。可以将其视为一种自动微调。I "增益的缺点是,由于它总是对过去的误差做出反应,因此会降低控制回路的阻尼,因为它总是在 "追赶"。
衍生收益 (D) 由于会反馈角度的变化率,因此会增加阻尼。也可以认为它试图预测角度的未来变化。D "增益的缺点是会增加驱动舵机的噪音量,如果调得太高,会导致快速俯仰或滚转振荡,在某些情况下会损坏飞机。
前馈增益 (FF) 可能是最重要的,因为它直接根据(飞行)控制器输入的所需速率驱动控制面,就像飞行员在手动模式下所做的一样。基于 P、I 和 D 速率误差的贡献还可用于修正任何修整、CG 或外部干扰影响。
调整 FF、P、PI 或 PID 值可以提高预期姿态(前平移/俯仰、速度、方位等)与实际姿态之间的误差抵消速度,而不会产生不必要的振荡。
提示
简单的配置只需指定一个 P 项(I 和 D 为零,且 INT_MAX 当 I 为零时不使用)。而 4.1 及以后版本的固件在 I=FF 时的 FF/P 项,D=0。
参考 手动滚动、俯仰和偏航控制器飞行稳定调整指南 或 此处用于 4.1 之前的固件版本.获取更多信息