使用 MAVProxy 的多辆载具¶
MAVProxy 支持多载具运行。
要使用此功能,请确保所有载具(真实载具或 SITL)都有不同的 SYSID_THISMAV 参数值。使用方法 停止 设置 SYSID_THISMAV X 在 MAVProxy 控制台中设置该值(其中 X 是 id)。
大多数 MAVProxy 模块设计为一次只能与一辆飞行器通话。这就是活动载具。要更改哪个飞行器处于活动状态,请使用图形控制台的 "飞行器 "下拉菜单。然后,所有模块将只向该载具发送相关命令。
终端有两个选项:
使用
所有链接 <cmd>;依次向所有载具发送 <cmd>。例如所有链接 模式 rtl将在所有载具上设置 RTL 模式。使用
载具 <n>;设置活动载具
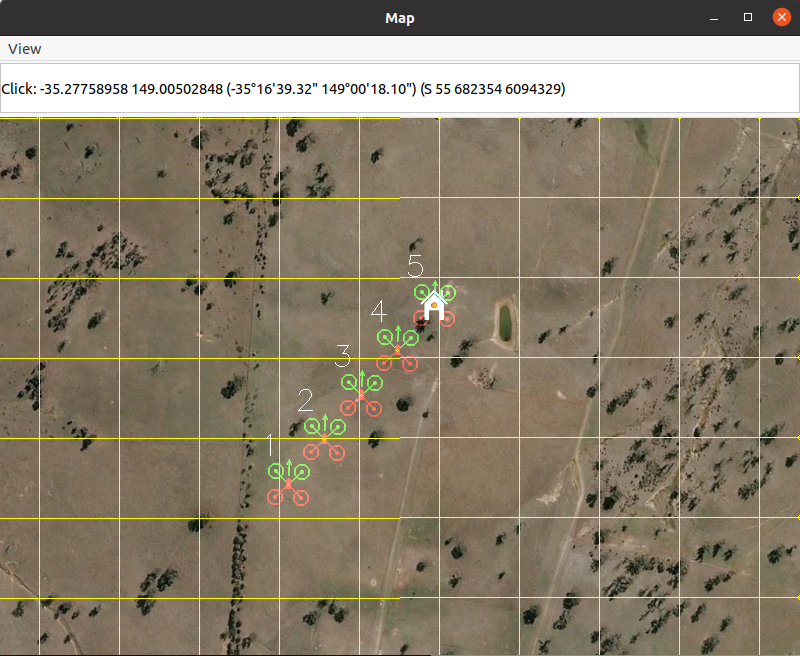
参见 蜂群模块 的图形用户界面,实现蜂群管理和运行自动化。