准备调试¶
请务必执行本维基页面中的步骤,为手动或自动调整做好准备。以下视频介绍了本维基页面中描述的步骤。
减少控制信号噪音¶
在开始手动飞行稳定调整或自动飞行稳定调整之前,确保尽可能降低控制信号中的噪音。最好的方法是使用谐波带阻滤波器。请按照 旋翼飞行器动态带阻滤波器设置.
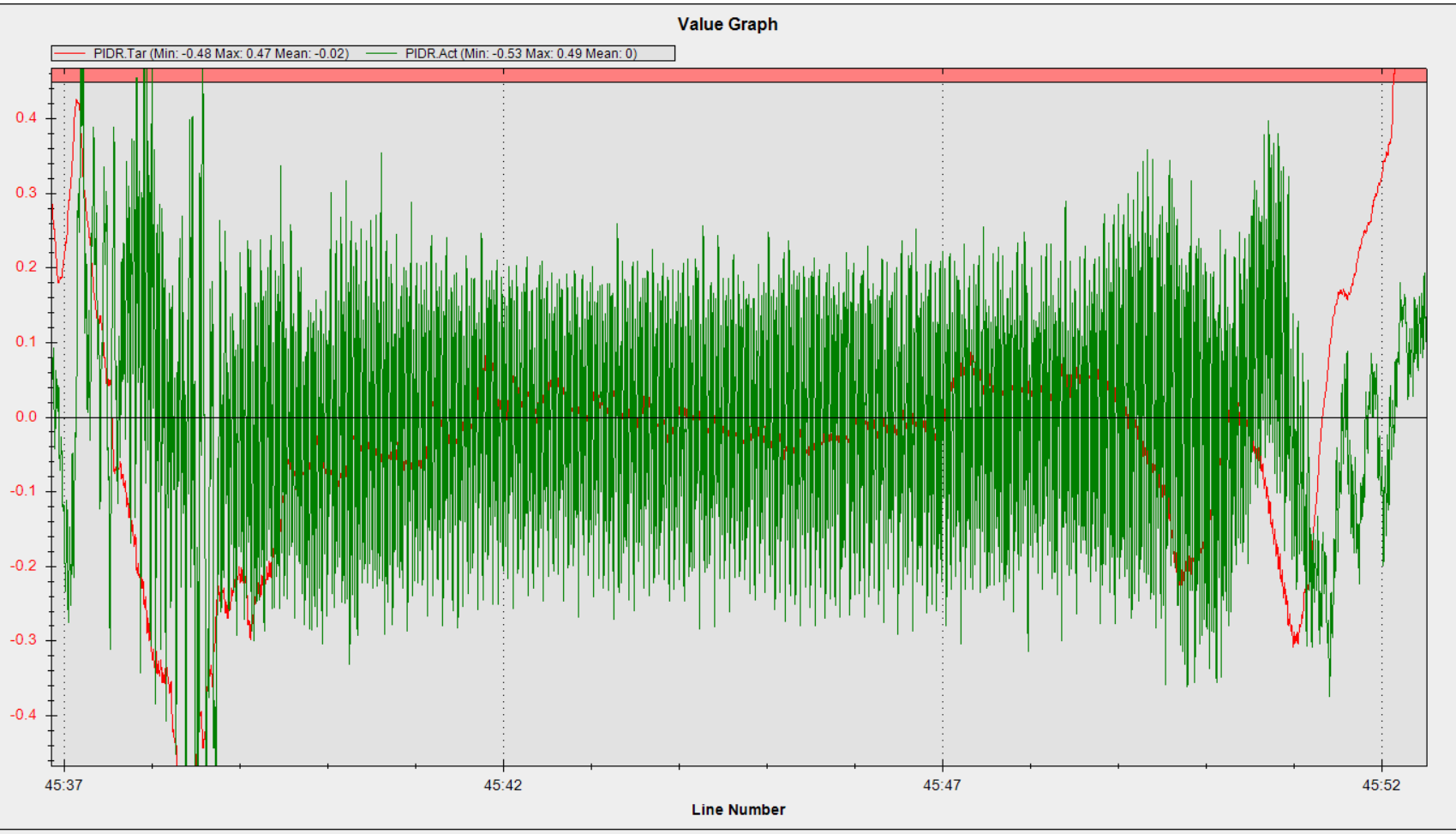
检查控制信号的一个好方法是设置 LOG_BITMASK 参数,以便除默认选择外,还选择 FAST ATTITUDE 和 PID 信息。使用 Mission Planner 等 GCS 软件查看 PIDR.Act、PIDP.Act 和 PIDY.Act。这些信号中的噪音应较低。下面的示例显示了目标滚转速率(红色)和实际滚转速率(绿色)。速率单位为拉德/秒。请注意实际滚动速率中的振动(噪音),峰值达到 0.2 到 -0.2 rad/s。这将是一个很大的噪声,可能会导致自动调整失败或调整效果不佳。最终,实际速率的偏差应该很小(< 0.05 rad/s)。
备注
在飞行稳定调整之前,建议检查高频振动是否会导致 "倾斜"(请参阅 "飞行稳定调整 "章节)。 传统旋翼飞行器小贴士)
确保旋翼飞行器在盘旋时不会漂移¶
按照本章悬停微调部分的步骤进行操作。 首次飞行测试 维基页面,以确保旋翼飞行器保持接近无漂移的悬停速度(< 1 m/s)。
参数初始设置¶
俯仰轴和滚动轴¶
以下是开始调整旋翼飞行器时应使用的初始参数值。如果您需要修改默认的尾翼设置,只需将俯仰和滚转的 FF 设置为 0.15,就可以轻松控制旋翼飞行器。
110000 |
|
110000 |
|
4.5 |
|
4.5 |
|
0 |
|
0 |
|
20 |
|
20 |
|
0.1 |
|
0.05 |
|
0.40 |
|
0 |
|
0.15 |
|
0 |
|
0 |
|
20 |
|
20 |
|
0.1 |
|
0.05 |
|
0.40 |
|
0 |
|
0.15 |
|
0.15 |
偏航轴(方向舵)¶
建议先确保尾翼功能正常,然后再调整俯仰和滚转。以下是偏航的建议设置。
备注
与运动型旋翼飞行器相比,无人驾驶旋翼飞行器的头速通常较低,盘面负荷较高。对于机械驱动的尾翼,这也意味着尾翼速度低于正常水平,尾翼动力降低。如果您的旋翼飞行器符合这一描述,建议设置为 ATC_RAT_YAW_FF 到 0.05。
80000 |
|
4.5 |
|
0.003 |
|
0 |
|
20 |
|
20 |
|
0.12 |
|
0.0 |
|
0.33 |
|
0.18 |
|
0.0 |