自动飞行稳定调整¶
用于 tradheli 的自动调整与多旋翼自动调整完全不同。它可以调整任何前馈 (ATC_RAT_xxx_FF)、利率收益(ATC_RAT_xxx_P 和 ATC_RAT_xxx_D),或 P 角增益 (ATC_ANG_xxx_P).调整速率增益时,首先要找到速率增益的最大允许值,然后对其进行调整。知道最大值后,自动调整功能就不会产生不稳定性。
启动 AutoTune 之前,您必须
尽可能减少控制信号的振动
在风平浪静的日子里,旋翼飞行器将保持近乎无漂移的悬停速度(< 1 m/s)
这将大大提高自动调整成功的几率。
以下视频介绍了本维基页面中描述的步骤。
参数说明¶
飞行稳定调整序列位掩码¶
用户可以使用 AUTOTUNE_SEQ 参数。可使用位掩码指定单个增益调整或多个增益的组合调整。速率 P 和速率 D 同时进行,并且总是在确定允许的最大增益之前进行。
位 |
价值观 |
||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
** 最大增益的确定总是在调整速率 D 和速率 P 增益之前进行。该测试确定速率 D 和速率 P 增益的最大允许值。 ATC_RAT_xxx_D 及样品; ATC_RAT_xxx_P 这样,旋翼飞行器就不会因增益过高而出现伺服振荡。由于 ATC_RAT_xxx_D 及样品; ATC_RAT_xxx_P 发现这些增益后,可通过将其最大允许值的 5%递增来进行调整。
轴位屏蔽¶
"这款" AUTOTUNE_AXES 参数指定一个或多个要调整的轴。
位 |
价值观 |
||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
最大响应增益¶
"这款" 自动调整最大值 参数指定用于调整速率 D、速率 P 和角度 P 增益的最大响应增益。响应增益是响应输出除以输入。建议将 1.8 至 2.0 用于俯仰轴和横滚轴,因为这些轴的阻尼通常较小。建议偏航轴使用 1.0 至 1.4。
最低测试频率¶
"这款" autotune_frq_min 参数指定驻留或频率扫描时使用的最小频率(单位:弧度/秒)。对于频率扫描,这将是起始频率。默认值适用于旋翼直径小于 1.4 米的旋翼飞行器。
最大测试频率¶
"这款" 自动调整最大值 参数指定驻留或频率扫描期间使用的最大频率(单位:弧度/秒)。对于频率扫描,这将是结束频率。默认值适用于旋翼直径大于 1.2 米的旋翼飞行器。对于旋翼直径小于 1.2 米的旋翼飞行器,可以考虑提高到 100 弧度/秒。
速度 P 增益¶
"这款" autotune_velxy_p 参数指定速度反馈的 P 增益。这有助于自动调整功能在频率扫描和驻留期间保持飞机位置。它不适用于 ATC_RAT_xxx_FF 调整。保持在 0.1,除非飞机在驻留和频率扫描期间漂移超过 10 米。它只影响飞机在这些测试中摆动时的位置保持。如果在驻留和扫频测试期间漂移超过 10 米,则增加该参数,但不要超过 0.2。在振荡间隙,如果飞机未进行适当的悬停修整,则可能会出现漂移。该增益对此没有帮助。
准备自动调整¶
确保您填写了以下表格中的所有项目 准备调试 维基页面。
发射机设置¶
确保将自动调整飞行模式作为发射机飞行模式开关上的飞行模式之一。如果您的旋翼飞行器表现不佳,您不希望伸手去拿 GCS 来切换 AutoTune 模式。您希望能够立即切换模式。
自动调整飞行¶
建议的飞行稳定调整顺序¶
对于任何轴,建议首先进行前馈增益调整,然后进行速率 D 和速率 P 增益调整,最后进行角度 P 调整。不要试图在一次飞行中调整每个轴,调整一个轴可能需要 10-15 分钟。以下是建议的飞行和调整顺序。传统旋翼飞行器不需要偏航前馈调整,因此增益可以设置为零。双旋翼飞行器可能需要偏航前馈调整。
飞行 |
参数 |
价值 |
|---|---|---|
1 |
3(滚动和俯仰) |
|
1(前馈) |
||
2 |
2(间距) |
|
2(D 级和 P 级) |
||
1.8 |
||
3 |
1(卷) |
|
2(D 级和 P 级) |
||
1.8 |
||
4 |
3(滚动和俯仰) |
|
4(角度 P) |
||
1.8 |
||
5 |
4(偏航/航向) |
|
2(D 级和 P 级) |
||
1.0 |
||
6 |
4(偏航/航向) |
|
4(角度 P) |
||
1.8 |
调整飞行程序¶
进行自动调整飞行时,确保至少有 50 米乘 50 米的飞行区域。在自动调整过程中,飞机会移动。不要让飞机离得太远。
注意事项
在前馈测试期间,飞机可能会飞行 5-10 米,对于较大型的旋翼飞行器来说可能会更远。每次调整测试后,您可能都需要将飞机调回来。
启动控制器。
将飞行模式设置为稳定或 AltHold(建议使用 Althold)。
启用电机联锁,让转子完成运行。
升空并在离地面约 3-5 米处稳定悬停。
切换到自动调整,将所有摇杆居中。
自动飞行稳定调整将开始执行操作。
备注
如果没有发现任何变化,请确认摇杆是否居中。
调试完成后,GCS 会显示 "自动调试完成 "的信息。
要测试设置,请退出 AutoTune,然后再返回 AutoTune,就可以测试已调整的设置。
完成测试后,在 AutoTune 中下降并着陆。飞机着陆后,发动机将自行关闭。此时将发动机联锁开关拨至禁用状态,解除飞机的上膛。
备注
飞机必须在自动调整飞行模式下解除警报才能保存增益设置。
飞行稳定调整操作说明¶
ATC_RAT_xxx_FF 飞行稳定调整¶
"这款"
ATC_RAT_xxx_FF调整的方法是实现 50 度/秒的恒定角速度,并确定保持 50 度/秒所需的稳态指令。实现恒定角速率的操作包括在一个方向上改变姿态 15 度,然后反转方向,在反方向达到 15 度之前实现 50 度/秒的恒定速率。最后返回起始姿态。期间ATC_RAT_xxx_FF调试时没有位置保持逻辑,飞机可能会漂移,请根据需要在两次机动之间调整飞机位置,以防止飞机漂移。在测试过程中,任何输入都将停止调试,除非操纵杆对准中心,否则不会重新开始。以下视频演示了ATC_RAT_xxx_FF飞行稳定调整。
ATC_RAT_xxx_D 和 ATC_RAT_xxx_P 飞行稳定调整¶
ATC_RAT_xxx_D和ATC_RAT_xxx_P调整首先要确定最大ATC_RAT_xxx_D和ATC_RAT_xxx_P可安全调整的增益。频率扫描从 autotune_frq_min 至 自动调整最大值.这就确定了计算最大允许增益所需的大致频率。完成一系列驻留(在一个频率上的振荡),以更准确地确定计算最大允许增益所需的数据。ATC_RAT_xxx_D和ATC_RAT_xxx_P收益。接下来进行另一次频率扫描,以近似确定飞行稳定调整频率。ATC_RAT_xxx_D收益。那么ATC_RAT_xxx_D直到响应增益停止下降。接下来ATC_RAT_xxx_P增益增加,直到响应增益超过 自动调整最大值.在调试过程中,您不能输入任何信息来保持位置,但逻辑包括在测试动作期间保持位置,但不包括动作之间的位置保持。如果您进行了任何输入,它就会停止调试,直到您将操纵杆置于中心位置后才会重新开始。飞机在机动过程中的漂移会很小。如果在机动过程中漂移超过 10 米,则 速度 P 增益 可以增加,以尽量减少漂移。在摆动机动之间,如果飞机未进行适当的悬停修整,则可能会出现漂移。飞机 速度 P 增益 增益对此没有帮助。飞行稳定调整扫描时间为 23 秒。以下视频演示了ATC_RAT_xxx_D和ATC_RAT_xxx_P飞行稳定调整。
ATC_ANG_xxx_P 飞行稳定调整¶
ATC_ANG_xxx_P飞行稳定调整开始时,首先从 autotune_frq_min 至 自动调整最大值.这就确定了最大响应增益的大致频率。然后进行驻留(在一个频率上的振荡),以调整ATC_ANG_xxx_P增益。增益的增大或减小决定了ATC_ANG_xxx_P增益,该增益与响应增益(输出角/输入角要求)相匹配 自动调整最大值.在调试过程中,您不能输入任何信息来保持位置,但逻辑包括在测试动作期间保持位置,但不包括动作之间的位置保持。如果您进行任何输入,它就会停止调试,直到您将摇杆置于中心位置后才会重新开始。如果在操作过程中漂移超过 10 米,则 速度 P 增益 可以增加,以尽量减少漂移。在摆动机动之间,如果飞机未进行适当的悬停修整,则可能会出现漂移。飞机 速度 P 增益 增益对此没有帮助。飞行稳定调整扫描时间为 23 秒。
最大增益的确定¶
该测试可确定最大
ATC_RAT_xxx_D和ATC_RAT_xxx_P可安全调整的增益。频率扫描从 autotune_frq_min 至 自动调整最大值.这就确定了计算最大允许增益所需的大致频率。完成一系列驻留(在一个频率上的振荡),以更准确地确定计算最大允许增益所需的数据。ATC_RAT_xxx_D和ATC_RAT_xxx_P增益。GCS 信息中提供了最大允许增益。虽然这些增益被称为最大允许增益,但不建议在没有任何积累的情况下使用这些增益,因为它们很可能会导致反馈振荡。经验表明ATC_RAT_xxx_D可以安全地使用最大允许值的 25%-35% 增益,并且ATC_RAT_xxx_P可以安全使用最大允许增益的 50%。如果您有任何输入,它将停止增益确定测试,直到您将操纵杆对中后才会重新开始。在操作过程中,飞机的漂移将非常小。如果在操作过程中漂移超过 10 米,则 速度 P 增益 可以增加,以尽量减少漂移。在摆动机动之间,如果飞机未进行适当的悬停修整,则可能会出现漂移。飞机 速度 P 增益 增益对此没有帮助。频率扫描持续时间为 23 秒。
飞行稳定调整检查¶
该测试允许用户查看频域中的最终飞行稳定调整。它包括一次频率扫描,以获得可在日志文件中查看的频域数据。如果您在扫频过程中进行了任何输入,那么它将停止调试检查测试,直到您将摇杆对中后才会重新开始扫频。在操作过程中,飞机的漂移将非常小。如果在操作过程中漂移超过 10 米,则 速度 P 增益 可以增加,以尽量减少漂移。频率扫描持续时间为 23 秒。
日志分析¶
ATC_RAT_xxx_FF 飞行稳定调整¶
在完成 ATC_RAT_xxx_FF 调整时,应查看日志,以确保代码确定了 ATC_RAT_xxx_FF 增益。除非机头速度很低,否则增益不应超过 0.3。下图显示了 FF 飞行稳定调整测试的目标速率和实际速率的时间历史。
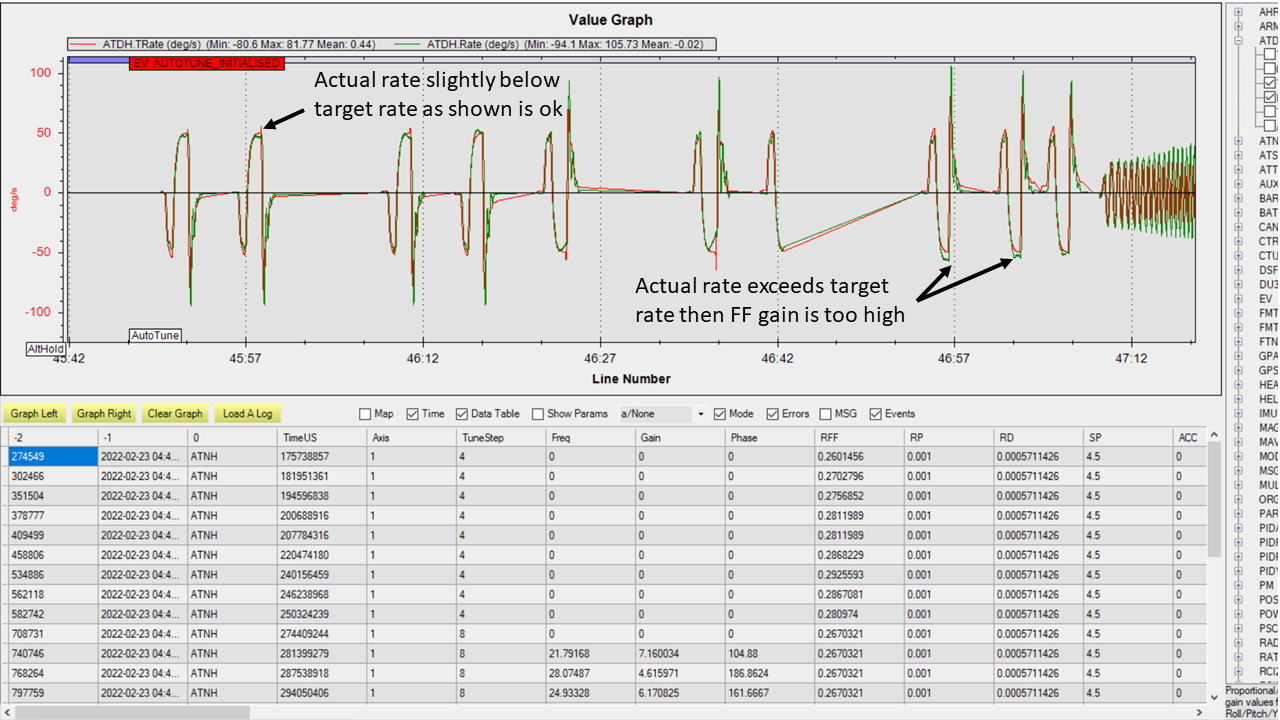
在时间历程中,FF 增益的一个良好捕捉示例显示了飞行稳定调整过程中的调高部分。在达到稳定状态时,实际速率略低于目标值。接下来是音调降低的 FF 调整,可以看到在达到稳定状态之前,速率似乎有所下降。FF 增益增加了,但可以看到实际速率超过了目标值,导致 FF 增益过高。如果您看到类似的行为,最好在速率略低于目标速率时找到 FF 增益,并将其手动输入到 ATC_RAT_xxx_FF 收益。
视频讨论了日志中应注意的事项。
ATC_RAT_xxx_D 和 ATC_RAT_xxx_P 飞行稳定调整¶
在完成 ATC_RAT_xxx_D 和 ATC_RAT_xxx_P 调整时,应审查日志,以确保增益的确定是正确的。如果 ATC_RAT_xxx_D 如果飞行稳定调整后增益为零,可通过查找 bin 日志文件中 GCS 信息提供的最大允许增益进行手动调整。使用最大增益测试结束时提供的增益的 10% 作为 rate_d。信息如下
自动调整:最大速率 P freq=23.62473 gain=6.239318 AutoTune: ph=161.0000 rate_p=0.121300 AutoTune:最大速率 D freq=41.98507 gain=1.493140 AutoTune: ph=251.0000 rate_d=0.012072
因此,在这种情况下 ATC_RAT_xxx_D 可手动输入 0.0012,也可手动更改 ATC_RAT_xxx_P 为零。然后再次运行自动调整测试。如果 ATC_RAT_xxx_D 如果增益与手动输入的值相比没有变化,则接受已调整的值,然后转到 ATC_ANG_xxx_P 飞行稳定调整。
最常见的问题可能是 ATC_RAT_xxx_P 飞行稳定调整是 最大响应增益 可能设置得过低。可能需要查看日志以确定最高响应增益。然后设置 最大响应增益 但不要超过 2.2,因为在捕捉姿态时,响应可能会出现较大的过冲。
视频讨论了日志中应注意的事项。
ATC_ANG_xxx_P 飞行稳定调整¶
在完成 ATC_ANG_xxx_P 调整时,应查看日志以确保增益的确定是正确的。请务必设置 最大响应增益 略高于 ATC_RAT_xxx_D 和 ATC_RAT_xxx_P 飞行稳定调整,可能会高出 10%。在这种飞行稳定调整中,最大响应增益出现的频率是由频率响应决定的。然后 ATC_ANG_xxx_P 提高或降低增益,以在出现最大响应增益的频率上实现所需的响应增益。下面是一个频率扫描示例。 ATC_ANG_xxx_P 飞行稳定调整。
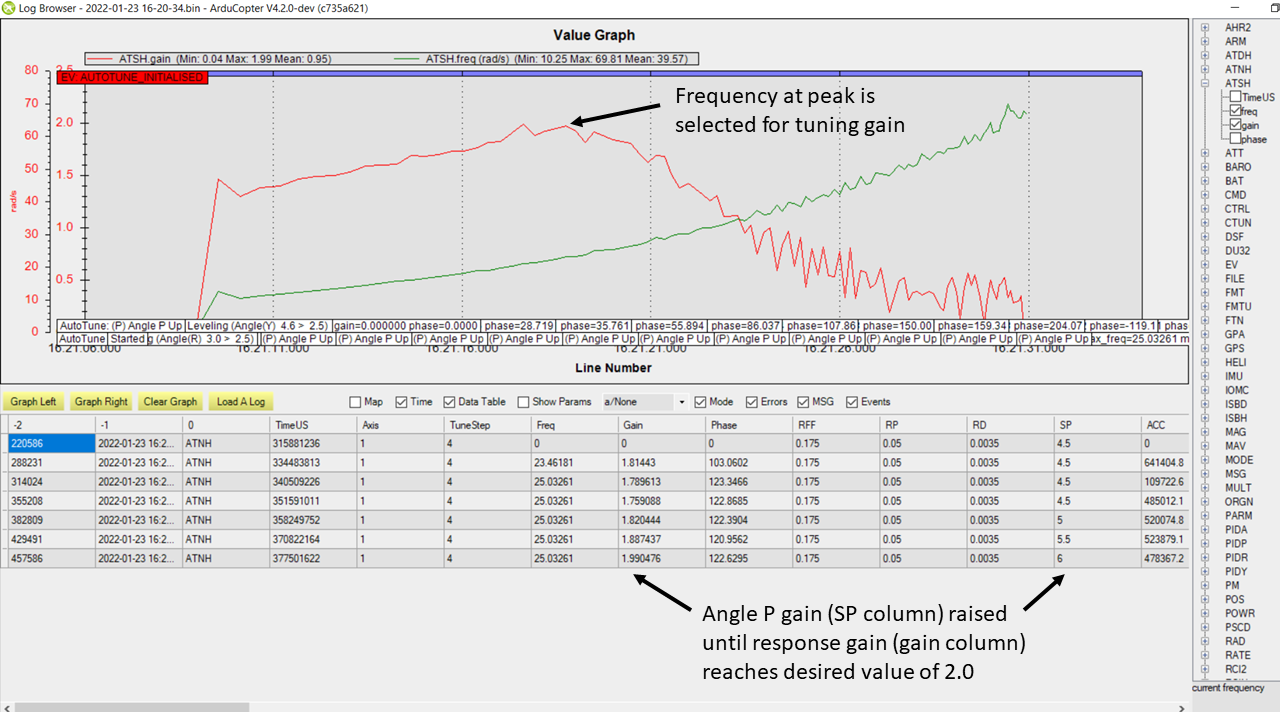
在本例中,响应增益 (ATSH.gain) 的峰值显示在图表中。下表显示了频率扫描后完成的驻留,其中 ATC_ANG_xxx_P 直到响应增益达到 最大响应增益 在本例中为 2.0。确保找到正确的频率非常重要。在调整偏航轴等情况下,响应增益可能没有峰值,选择的低频可能不会导致增益的正确调整。在这种情况下 ATC_ANG_xxx_P 因此,如果起始值为 4.5,则手动将其设置为 5.5,然后运行 ATC_ANG_xxx_P 再次调整。