传统旋翼飞行器 - 斜盘设置¶
斜盘的设计目的是接收基于飞行员俯仰、滚转和集合指令的伺服输入,并将其转换为单个叶片的俯仰输入。三伺服和四伺服斜盘有许多不同的伺服安排。斜盘库涵盖了三伺服和四伺服斜盘的所有常用配置。如果您有独特的斜盘,也可以使用通用的三伺服斜盘。
线性化舵机是三舵机和四舵机十字盘都可以使用的功能。不过,三舵机十字盘是可选的,因为不会出现绑定。四舵机十字盘很可能始终需要使用该功能,因为在四点连接中可能会出现绑定。
下面的视频将介绍斜盘的安装和调平。
本视频包括设置最小集电极、最大集电极、零推力集电极、最大循环和稳定集电极曲线。
开始之前¶
在开始安装斜盘之前,请确保您的旋翼飞行器控制连杆已按照组装说明进行了安装。为了准确测量桨叶间距,请在起落架下方使用垫片使旋翼轴垂直于地面,如下图所示。
最后,如果您没有调整尾旋翼连杆机构,或者在使用燃气发动机时没有调整节气门连杆机构,就有可能在安装斜盘时发生粘连。这是由于 H_SV_MAN 该功能提供手动伺服设置,可将伺服器驱动到最小和最大值。这包括尾旋翼舵机和油门舵机的油门曲线设置。
选择斜盘类型¶
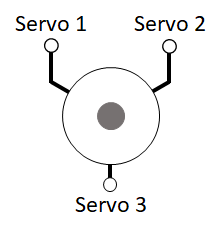
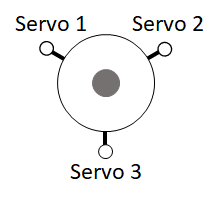
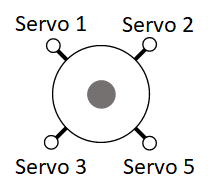
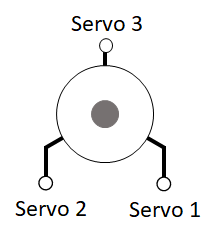
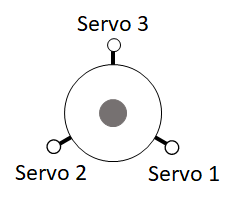
下面是使用 H_SW_TYPE 参数。图中标出了三种伺服斜盘类型的伺服连接位置,分别为伺服 1、伺服 2 和伺服 3。这也与(飞行)控制器上伺服输出 1 至 3 的默认输出功能相对应,可用于这些类型的斜盘。
对于单螺旋桨,分配给伺服 1 的伺服功能是电机 33,分配给伺服 2 的伺服功能是电机 34,分配给伺服 3 的伺服功能是电机 35。这些分配对于双旋翼飞行器框架的十字盘 1 是相同的。双螺旋框架的十字盘 2 默认为伺服输出 4、5 和 6,分别分配有电机 36、37 和 38。
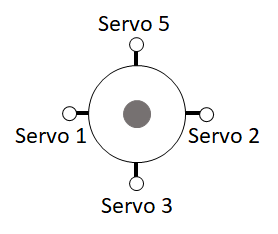
对于四伺服十字盘,单螺旋桨框架上的第四伺服(伺服 5)默认为伺服输出 5,并分配给电机 37。对于双旋翼飞行器框架,斜盘 1 上的第四个伺服(伺服 7)默认为伺服输出 7,并分配给电机 39。斜盘 2 上的第四个舵机(舵机 8)默认为舵机输出 8,并分配电机 40 功能。
备注
如果双旋翼飞行器框架带有四个伺服斜盘,则需要将 RSCHeli 输出功能(电机 31)分配给另一个伺服输出,而不是通常默认的伺服输出 8。
斜盘类型¶
H3 通用型 - 允许用户设置伺服位置和相位角。假设所有斜盘滚珠链节与主轴的距离相同。
H1 非CCPM - 伺服器 1 为副翼,伺服器 2 为升降舵,伺服器 3 为集合控制
H3-140
H3-120
H4-90
H4-45
可支持的其他斜盘类型
H3R-140 - 使用 H3-140。可能需要 H_SW_COL_DIR 将被推翻。
H3R-120 - 使用 H3-120。可能需要 H_SW_COL_DIR 将被推翻。
H3-90 - 使用 H4-90。不要使用伺服输出之一。
检查斜盘的正常运动¶
使用发射机检查斜盘对循环和集体输入的响应是否正常:
向前推升降杆,斜盘向前倾斜;向后拉升降杆,斜盘向后倾斜。
向右推动副翼摇杆,斜盘向右倾斜;向左推动副翼摇杆,斜盘向左倾斜。
向上推油门杆(集体),斜盘将上升;向下拉油门杆(集体),斜盘将下降。
设置 伺服 1_反转, 伺服2_反转, 伺服3_反转和 H_SW_COL_DIR 参数,这样您的十字盘就能对集体和循环输入做出正确的响应(如上所述)。
调平十字盘¶
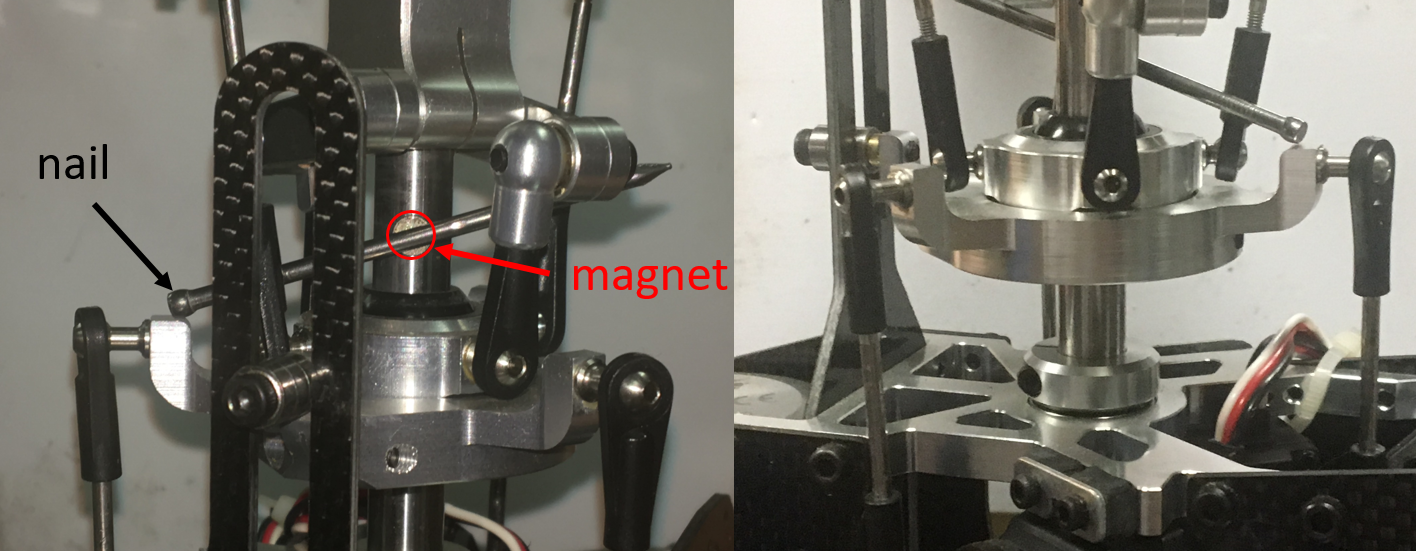
可以使用专门设计用于保持斜盘与轴垂直的工具来调平斜盘,或者使用磁铁和钉子(如下图所示)这种成本较低的方法。使用磁铁和钉子无需拆下转子头即可调平斜盘。旋转轴,使钉子穿过斜盘臂。使用以下方法之一调整斜盘,使钉子接触到每个斜盘臂的顶部。
不使用线性化伺服功能调平斜盘¶
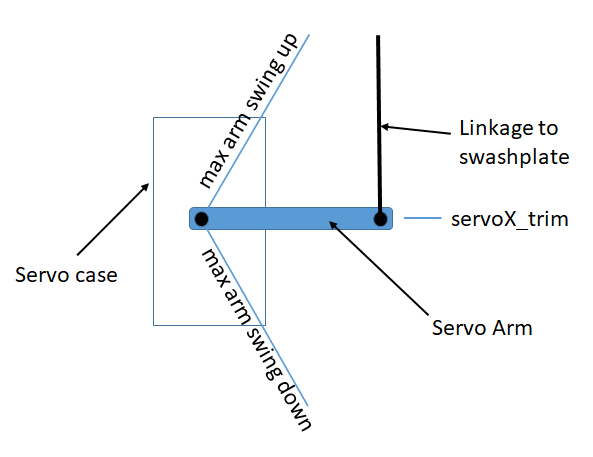
如果不使用线性化舵机功能,则将使用舵机微调参数来调整斜盘水平。设置 H_SV_MAN 参数为 1。调整发射机油门杆(集体),直到舵机与轴几乎垂直。调整 SERVO1_TRIM, SERVO2_TRIM和 SERVO3_TRIM 直到斜盘水平。
使用线性化伺服功能调平斜盘¶
如果您打算使用线性化舵机功能,则必须使用连接十字盘和舵机的螺距链接来调平十字盘。首先,您需要设置伺服器,使其在伺服器行程的中点与螺距链接垂直,而在大多数情况下,螺距链接也会与轴垂直。如果舵机控制角上的花键无法使舵机臂与轴垂直,则可以使用舵机微调参数使其与轴垂直。您希望微调值尽可能接近 1500。现在您可以调整螺距链接,使斜盘水平。
集体音高设置¶
使用伺服手动设置 (H_SV_MAN ) 在最小和最大位置之间移动斜盘。在每个位置上使用叶片间距规设置所需的叶片间距。典型的集体桨叶间距范围为 -2° 至 +12°。完全特技飞行设置将使用 -12° 至 +12°。对于初始测试和正常自主操作,建议使用较窄的范围。参见 传统旋翼飞行器特技飞行设置 了解有关特技飞行设置的更多信息。
设置 H_SV_MAN 到 2,使斜盘移动到最大位置。调整 H_COL_MAX 直到叶片间距角达到所需的最大集体叶片间距。
设置 H_SV_MAN 至 4,使斜盘移动到最小位置。调整 H_COL_MIN 直到叶片间距角达到所需的最小集体叶片间距。
备注
整体集体测量必须使用 H_SV_MAN 参数,因为如果自动稳定系统启动,这些参数就会受到影响,变得不准确。
4.2 及更高版本¶
最小和最大集体叶片俯仰角¶
对于 H_COL_ANG_MAX,输入最大集体叶片俯仰角,单位为度,对应于 H_COL_MAX.对于 H_COL_ANG_MIN,输入最小集体叶片俯仰角(度),该角度对应于 H_COL_MIN.
零推力点¶
h_col_zero_thrst 是零推力时的集体叶片俯仰角,单位为度。与零推力相对应的集体叶片俯仰角用于设置集体与偏航的混合。对于对称桨叶,这将是零度的集体桨叶俯仰角。设置伺服器手动设置 H_SV_MAN 调至 3,使斜盘移动到零推力位置,并验证集体叶片间距是否与为 "桨叶间距 "设置的间距角一致。 h_col_zero_thrst.
最低着陆集体¶
"这款" H_COL_LAND_MIN 对于在垂直轴上使用高度保持的模式,该参数被用作以度为单位的集体俯仰下限。这可以防止(飞行)控制器驱动的集体俯仰角过低导致地面共振,还可用于在这些模式下检测着陆。默认角度为 H_COL_LAND_MIN 参数设置为 -2 度集体叶片俯仰角,可使配备对称叶片的飞行器以合理的速度下降,同时避免在地面上过于消极。如果使用非对称叶片,则应将其设置为比零推力俯仰角更小的叶片俯仰角。例如,如果 h_col_zero_thrst 则 H_COL_LAND_MIN 应设置为 -5 度。
备注
该参数的默认值应足够低,以保护大多数旋翼飞行器在自主飞行期间不会因错误着陆检测而在飞行中撤膛。这种情况最有可能发生在飞机悬停或着陆飞行阶段遇到上升气流,导致集电极降低到该参数值以下的情况下。杂技旋翼飞行器或使用非对称桨叶的旋翼飞行器应考虑降低该值。
4.1 及更早版本¶
零推力点¶
"这款" H_COL_MID 参数用作在垂直轴上使用高度保持的模式的集合螺距下限。这可以防止(飞行)控制器将集合高度调得过低,从而导致地面共振。参数 H_COL_MID 参数设置为零推力点,对称叶片通常为零度。如果使用非对称叶片,则将其设置为产生零推力的负叶片间距。
警告
该设置也用于位置/高度保持模式(如 LOITER),以确定是否已着陆,从而禁用可能导致飞行器在地面翻转的输入。如果不设置在零推力点,上升气流和/或风可能会导致错误的着陆判断。如果悬停点和零推力之间的俯仰范围非常小,就像一些具有高头部速度的激进 3D 特技飞行设计一样,则更有可能发生这种情况。设置 H_COL_MID 在这种情况下,如果飞行器能够承受以这种俯仰角和全速在地面上运行,那么将俯仰角降到 -1 度可能会提供一定的安全系数。
设置 H_SV_MAN 至 3,使斜盘移动到中间位置。调整 H_COL_MID 直到叶片间距角达到与零推力相对应的所需集体叶片间距。
稳定的集体曲线¶
ArduPilot 为稳定模式提供了一条可编程曲线,允许 "软化 "曲线,以提供更平滑的飞行员控制。该曲线由 IM_STB_COL_x 参数,如下图所示。所有其他模式均使用上述设置的集合极值和直线曲线。
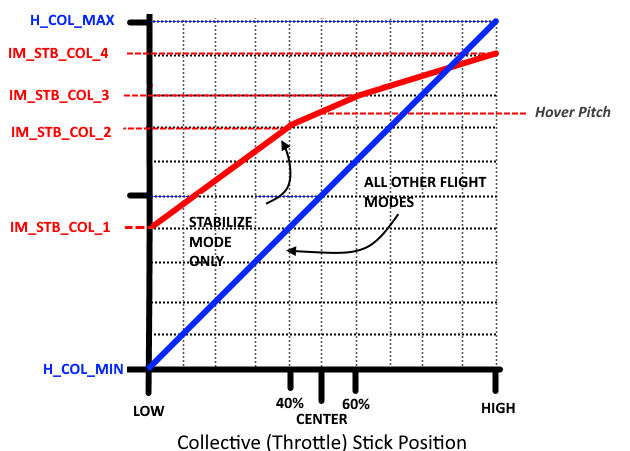
默认情况下,这些设置反映了完整的直线曲线,如果设置了 -2° 至 +12° 范围,则效果令人满意。这将产生以下值:
油门杆 |
间距 |
|---|---|
低 |
-2° |
中心 |
+3°(接近悬停,通常为 4°)。 |
高 |
+12° |
设置最大循环节距¶
参数 H_CYC_MAX 设置最大循环叶片间距。检查最大循环叶片间距需要将叶片与测量轴线呈 90 度定位。因此,如果要测量纵向最大桨叶周期螺距,则应旋转桨叶,直到其垂直于飞机机身(伸出左右两侧)。在升降舵和副翼杆居中的情况下测量叶片间距,然后将升降舵杆完全向前或向后偏转并测量叶片间距。两个测量值之间的差值将是最大循环叶片间距,对应于 H_CYC_MAX.俯仰轴(升降舵)和滚转轴(副翼)的循环叶片俯仰相同。