Mission Planner地面站中的电源监控器/模块配置¶
备注
ArduPilot 最多可使用 16 个电池监控器,前 10 个监控器的参数组名为 BATT_ 至 BATT9_,后 6 个监控器的参数组名为 BATTA_ 至 BATTF_。本文将显示第一个监视器的所有参数名称参考,即 BATT_
电源监控器可用于测量电池电压和电流,以用于电池故障安全保护,电源模块还可为(飞行)控制器提供稳定的电源。
ArduPilot 是 与多种电源模块/显示器兼容.
备注
带集成功率监控器的电路板默认设置了参数。
Mission Planner地面站设置¶
电池测量主要在 Mission Planner地面站's 初始设置 | 可选硬件 | 电池监视器 屏幕。请注意,目前Mission Planner地面站仅支持系统中的前两个电池监视器(固件 4.0 及更高版本中共有 10 个电池监视器)。更多的电池监视器需要直接在 配置/飞行稳定调整|完整参数列表 屏幕
MissionPlanner:电池监控器配置¶
启用电压和电流检测¶
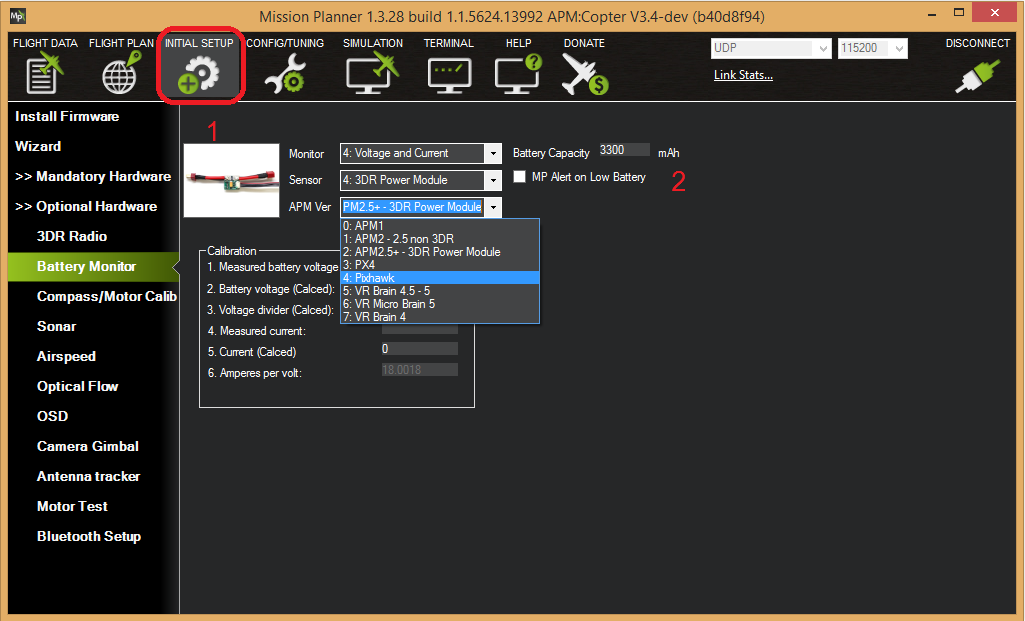
输入监视器可测量的属性、监视器类型、(飞行)控制器类型和电池容量:
监控器 电压和电流 或 电池电压
传感器 支持的电源模块,或 "其他
APM ver: (飞行)控制器(如 Pixhawk)
电池容量 电池容量(毫安时
"这款" 传感器 选择列表提供了许多模拟电源模块(包括 3DR 和 AttoPilot 的常用型号),您可以选择这些模块来自动配置您的模块。如果您的 PM 不在列表中,您可以选择 其他输入其建议值,或 进行手动校准 如下所述。
其他类型的电源模块/智能电池¶
除了普通的模拟电压和电流传感模块外,ArduPilot 还支持各种 SMBus、DroneCAN/CAN 电源模块和智能电池。(以下显示的是第一个监控器的参数。其他每个监控器都有自己的参数)。
通过 BATTx_MONITOR 参数。这些参数可直接通过每个电池监控器的配置/参数树选项卡进行设置。以下是支持的监控器类型:
类型 |
|
|---|---|
0 |
残疾 |
3 |
仅模拟电压 |
4 |
模拟电压和电流 |
5 |
独奏 |
6 |
Bebop |
7 |
|
8 |
DroneCAN-BatteryInfo |
9 |
|
10 |
选定监视器的总和,参见 BATTx_SUM_MASK 参数 |
11 |
|
12 |
|
13 |
|
14 |
|
15 |
NeoDesign |
16 |
SMBus-Maxell |
17 |
|
18 |
|
19 |
|
20 |
MPPT |
21 |
INA2XX |
22 |
LTC2946 |
23 |
Torqeedo 电机控制器 |
24 |
备注
一旦选择了特定的监视器类型,刷新参数后就会显示与该类型监视器相关的参数。刻度和偏移量、总线地址等将酌情显示在该监视器上。
其他参数¶
BATT_OPTIONS 如果设置为第 0 位,将忽略 DroneCAN 监测器中的 "充电状态 "字段,因为有些监测器不会在该字段中填入有意义的数据。此外,还为 MPPT 类型的监控器提供了各种选项。第 6 位允许发送静态电压来代替电池电压,这有时会更有用。第 7 位允许从另一个具有相同功能的 DroneCAN 监测器发送电池辅助信息。 batt_serial_num 将用于此监视器实例。
BATT_SUM_MASK 如果监视器类型为 "10"(Sum Of Selected Monitors),则使用该选项可选择对哪些监视器报告的电压进行平均,对电流值进行求和,并报告该监视器的情况。选择此监控器自身的实例编号没有任何影响。如果未设置任何位,则将平均所有较高编号实例的报告。
BATT_ARM_VOLT 是该监视器报告的允许上膛的最小电压。
BATT_ARM_MAH 是该监视器报告的允许上膛的最小剩余容量。
BATT_CURR_MULT 允许调整 DroneCAN(UAVCAN)监视器的当前刻度,因为这些监视器没有可供调整的 CAN 参数。
batt_serial_num 用于指定与 SMBUS 或 DroneCAN 监视器相关联的电池,因为这些监视器可能有多个实例。
BATT_MAX_AMPS 仅适用于 INA2xx 传感器。控制可报告的最大电流。该传感器通常集成在(飞行)控制器电路板上,并在固件中适当预设该值。通常情况下,只有当功率监控器 OEM 建议将其设置为某个值时,用户才会对其进行调整。
故障安全¶
可在电池/燃料不足的情况下实施故障保护。平面见 平面故障保护功能旋翼飞行器见 电池故障安全如需了解更多信息,请参阅 故障触发保护机制
模拟监视器校准¶
底部的 电池监控器 该屏允许您校准电压/电流测量值,以验证电池的测量电压是否正确。您还可以设置 传感器 选择列表 其他 并使用校准过程配置 "未知 "功率监控器/模块。
校准电压读数:
用手持式电压表或锂电池电压表检查锂电池的电压。 功率分析仪
将 Pixhawk 系列连接到计算机并插入锂电池
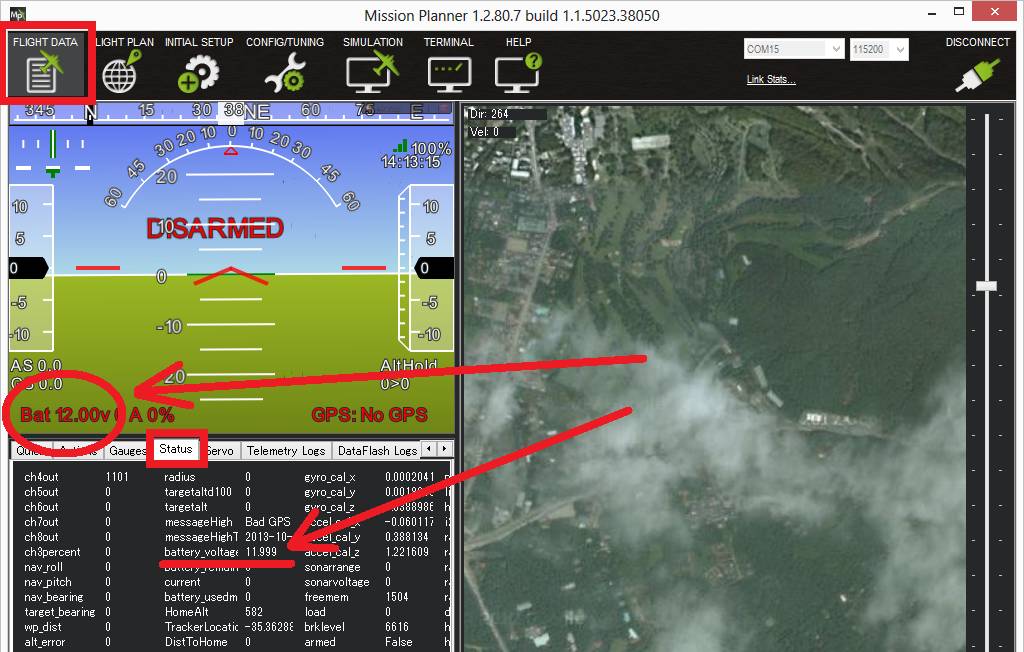
检查通过 Mission Planner地面站's 初始设置 | 可选硬件 | 电池监视器 屏幕或飞行数据屏幕的 HUD 或 现状 标签。
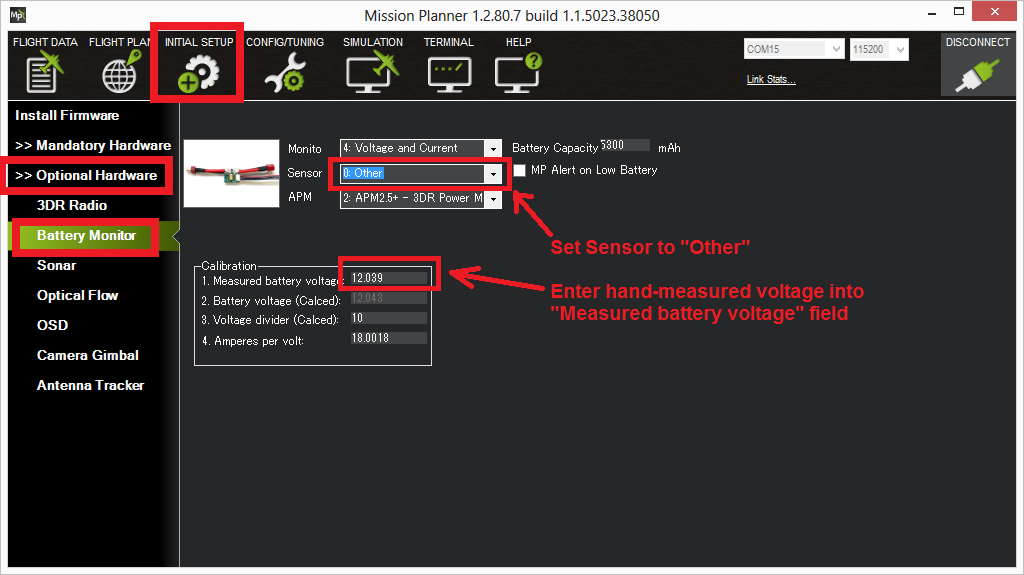
如果发现电压不正确(即与手持式电压表的读数相差超过 0.2V),可以通过以下方法进行校准:
关于 Mission Planner地面站's 初始设置 | 可选硬件 | 电池监视器 屏幕将 "传感器 "设为 "其他"。
在 "测量的电池电压 "字段中输入手持电压表的电压值
按制表符或单击字段外,"分压器(校准)"值将更新,"电池电压(校准)"现在应等于测量电压
您还可以使用功率分析仪测量电流,并与Mission Planner地面站中显示的结果进行比较。
备注
大多数电流传感器在低电流(小于 3 安培)时精度不高。通常情况下,应在 10 安培左右进行电流校准。使用霍尔效应传感器的 PM 是个例外,例如 来自毛奇的.
这段视频展示了使用 Turnigy 功率分析仪进行电压和电流校准的过程。
启用低电量警报¶
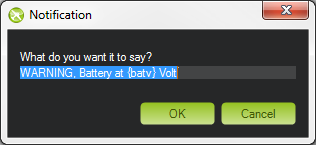
您可以设置 Mission Planner地面站 当电池电量不足时会发出口头警告(使用电脑语音)。
只需检查 电池电量不足时的 MP 警报 复选框,然后输入您希望听到的警告、电压电平以及剩余电流百分比。
将电源监视器连接到其他插脚¶
电源监视器通常插入(飞行)控制器(即 Pixhawk)的默认端口。如果希望更改电源监控器插入控制器的位置,可以使用 BATT_VOLT_PIN 和 BATT_CURR_PIN 参数