存档:罗孚 PX4FMU/PX4IO 接线和快速启动¶
警告
存档
PX4 已经报废,一般无法购买。本文供现有用户使用。
这篇文章提供了有关如何布线的高级信息。 PX4FMU/PX4IO (飞行)控制器板 它还可以为UGV无人车连接最重要的外设。
安装 PX4FMU / PX4IO 板堆栈¶
建议将 PX4FMU / PX4IO 板堆叠倒置安装,将 PX4IO 板放在顶部,以便不受限制地接触 PX4IO 板上的连接器。如果将 PX4IO 板安装在顶部,则需要指定 方向 在飞行Mission Planner地面站高级参数列表中,将 "roll 180 "改为 "8 "或 "180"。
另见 安装飞行控制器.
遥控设置¶
Pixhawk 使用单个 PPM 和 RC 输入。输出取决于您的漫游车上是否使用了转向伺服或 "滑动转向"(左或右电机转得更快,以转向相反方向)。
** PX4** |
载具 |
滑移装载机 |
1 |
转向伺服器 |
左电机 |
2/3 |
电机电调 |
右电机 |
输出通道:
重新分配遥控发射机杆通道¶
默认的发射杆配置几乎适用于所有情况。如果确实需要更改,请参阅 RCMAP 输入通道映射.
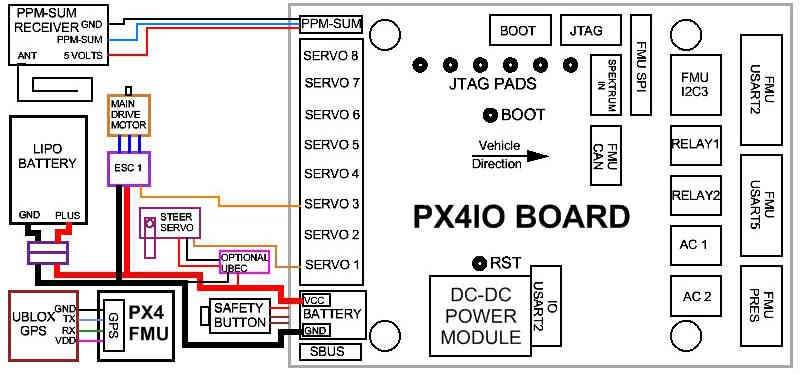
普通单电机伺服转向器接线图¶
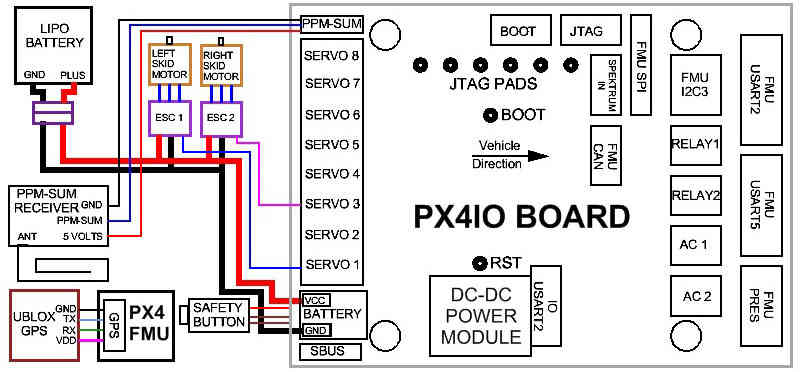
双电机滑橇转向器接线图¶
查看 Rover2 固件的基本操作模式¶
在路虎行驶之前,必须先解除电路板的自动安全装置。
安全按钮 LED 指示灯:
快速闪烁表示:错误状态,安全系统无法解除。可能未校准或传感器出错。
缓慢闪烁表示:安全状态。按下安全按钮 5 秒钟,即可解除安全状态。
LED 持续亮起表示:安全解除。PX4 控制器可在油门向下和向右的情况下启动。
当 LED 持续亮起表示安全解除时,可通过按下安全按钮 5 秒钟将其切换回安全启动状态。
在 "安全启动 "和 "安全解除 "状态下,都需要按住按钮 5 秒钟才能切换。 这是一种安全机制,可防止在使用过程中意外解除警报,也可防止在运输过程中意外解除警报。
测试手动模式¶
要测试手动模式,请将UGV无人车置于障碍物上,以防止失控,打开遥控发射机,启动(飞行)控制器(按下 PX4FMU 上的安全按钮 5 秒钟以解除安全锁(LED 灯亮起)),当获得 3D 锁定时
验证当升降舵操纵杆向前移动时,漫游车是否向前移动,反之亦然;当副翼操纵杆向左移动时,漫游车是否向左移动、
方向盘向左,反之亦然。
还可使用可显示通道 PWM 值的遥控接收机无线电测试仪来确定 Pixhawk 的油门和转向输出。
如果油门或转向通道反转,则必须使用遥控发射机通道反转功能来反转相应的通道。
测试自动模式¶
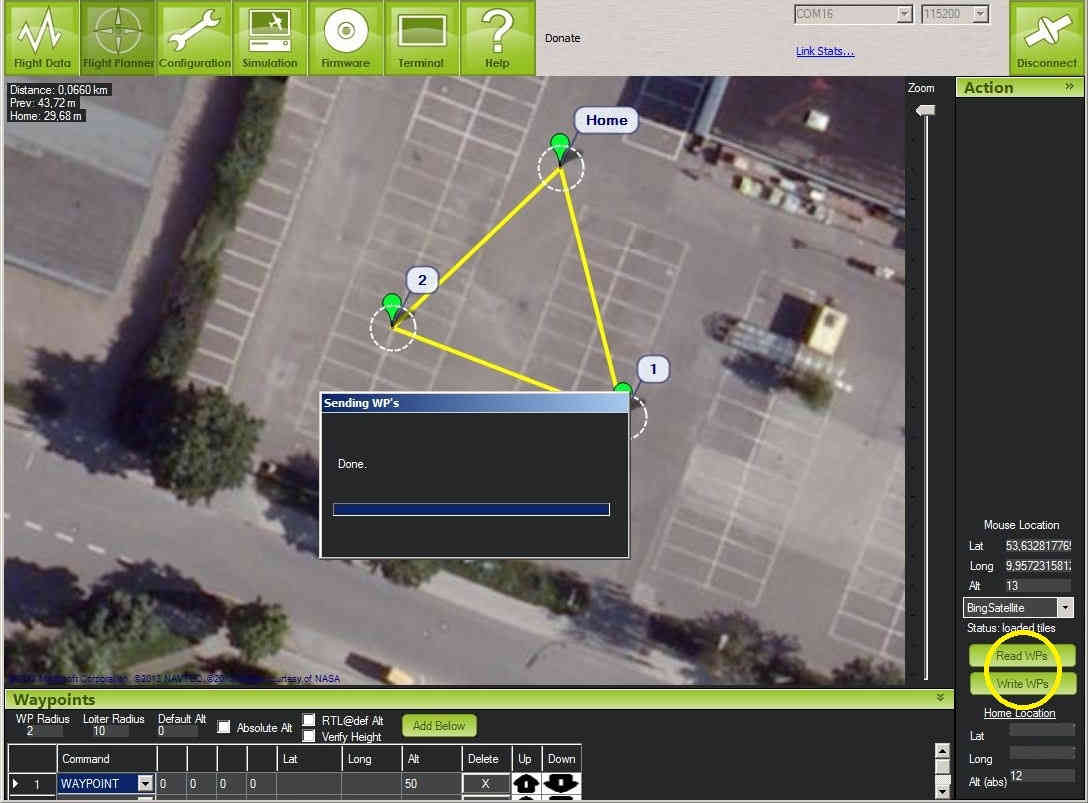
要测试自动模式,必须使用 MP 飞行计划器将至少一个航点载入 APM,该航点必须位于原航点的右侧或左侧:
使用与 "手动 "模式相同的测试装置,用 "手动 "模式验证罗孚节气门和转向系统是否仍然正常。
然后移动模式开关,将UGV无人车设置为自动模式,检查UGV无人车马达的速度是否与之前选择的巡航节流阀值相匹配,转向是否向右或向左移动,这取决于选择的第一个航点与原航点的相对位置。如果节流阀或转向器反转,则必须使用 MP 配置选项卡中的无线电校准(而不是遥控发射机),通过选中副翼(转向器)或节流阀上相应的 "反转 "框来反转相应的通道。
验证手动和自动模式的功能后,使用 MP 中的 "飞行计划器 "选项卡设置航点航线。确保将航点半径设置为 2 米左右,以获得良好的性能。
更完整的UGV无人车Mission Planner地面站使用指南请参见 学习使命.