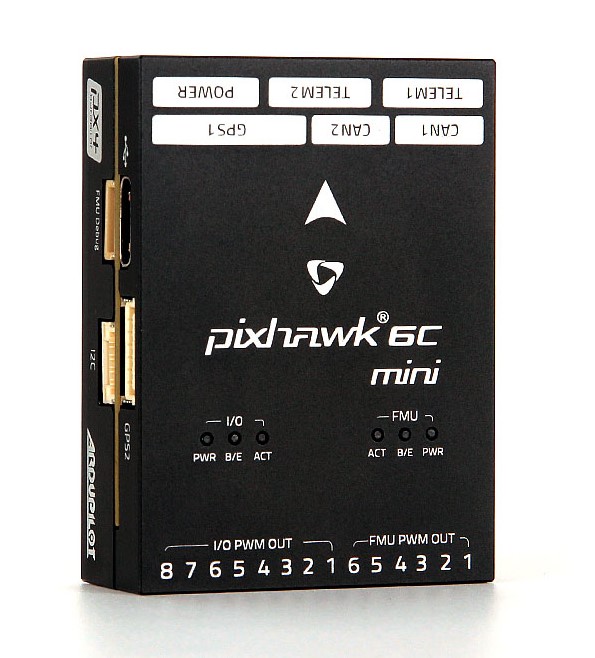
Pixhawk 6C 6C 迷你飞行控制器¶
Pixhawk6C 是 Holybro 成功的 Pixhawk® (飞行)控制器系列的最新升级产品,具有 STM32H7 cpus、IMU 振动隔离、冗余 IMU 和 IMU 加热功能。它有两种外形尺寸。6C Mini 缩小了尺寸,内置 PWM 电机/伺服头,但端口数量略少。

购买地点¶
Pixhawk6 (飞行)控制器由以下公司销售 圣卡罗
Pixhawk6 系列的特点¶
Pixhawk 6X |
Pixhawk 6C/Mini |
Pix32 v6 |
|
|---|---|---|---|
设计要点 |
额外冗余 |
低调 |
成本效益 |
模块化设计,可定制底板 |
成本效益 |
模块化设计,可定制底板 |
|
处理器 |
STM32H753 |
STM32H743 |
|
时钟速度 |
480 兆赫 |
||
IO 处理器 |
STM32F103 |
||
IMU 冗余 |
三重 |
双人 |
双人 |
IMU 温度控制 |
是 |
||
气压计冗余 |
双人 |
不适用 |
不适用 |
电源监控器 |
I2C |
模拟 |
模拟 |
PWM 输出 |
8 个主机,8 个调频单元 |
8 Main, 8/6 FMU |
8 个主机,6 个调频单元 |
UART |
8 |
7 / 4 |
7 |
CAN 总线 |
2 |
||
GPS/Compass 端口 |
2 |
||
UART 流量控制 |
3 个端口 |
2/1 港口 |
2 个端口 |
附加 I2C |
是 |
||
以太网支持 |
是 |
没有 |
没有 |
SPI 端口 |
是 |
没有 |
没有 |
A/D |
6.6V、3.3V、RSSI |
RSSI |
RSSI |
UART 映射¶
SERIAL0 -> USB
SERIAL1 -> UART7 (Telem1) RTS/CTS 引脚
SERIAL2 -> UART5 (Telem2) RTS/CTS 引脚
SERIAL3 -> USART1 (GPS1)
SERIAL4 -> UART8 (GPS2)
SERIAL5 -> USART2 (Telem3) RTS/CTS 引脚(不包括在 6C Mini 上)
SERIAL6 -> USART3 (USER) (调试 p)
SERIAL7 -> USB(协议更改后可用于 SLCAN)
RC 输入¶
RCIN 引脚默认映射为定时器输入,可用于所有 ArduPilot 支持的接收器协议,但 CRSF/ELRS 和 SRXL2 除外,因为它们需要真正的 UART 连接。不过,FPort 以这种方式连接时,只能提供 RC 而不提供遥测。
若要使用 Fport、CRSF 和 SRXL2 接收器中的 CRSF 和嵌入式遥测功能,则需要使用完整的 UART(如 SERIAL5 (UART3))来连接接收器。下面是使用串行 6 的设置。对于 6C Mini,需要使用 SERIAL1 - SERIAL4。
serial5_protocol 应设置为 "23"。
FPort 需要 serial5_options 设置为 "15"。
CRSF 将要求 serial5_options 设置为 "0"。
SRXL2 需要 serial5_options 设置为 "4",仅连接 TX 引脚。
任何 UART 都可用于 ArduPilot 中的遥控系统连接,并与除 PPM 之外的所有协议兼容。请参见 无线电控制系统 了解详情。
PWM 输出¶
Pixhawk6C 支持多达 16 路 PWM 输出。所有 16 个输出均支持所有正常的 PWM 输出格式。所有 FMU 输出(标有 "FMU PWM 输出")还支持 DShot。
8 个 FMU PWM 输出分为 4 组:
第 1 组中的 PWM 1、2、3 和 4
第 2 组 PWM 5 和 6
第 3 组中的 PWM 7 和 8(非迷你型 6C)
同一组中的 FMU 输出需要使用相同的输出率和协议。如果一个组中的任何输出使用 DShot,则该组中的所有通道都需要使用 DShot。
备注
要在输出 1-8 上使用 BDShot 功能,请使用 固件服务器
电池监测¶
电路板上有 2 个带 6 针连接器的专用电源监控器端口。Pixhawk6C 在这些端口上使用模拟电源监控器。
BATT_MONITOR = 4
BATT_VOLT_PIN = 8
BATT_CURR_PIN = 4
BATT_VOLT_MULT = 18.182
batt_amp_pervlt = 36.364
BATT2_VOLT_PIN = 5
BATT2_CURR_PIN = 14
batt2_volt_mult = 18.182
batt2_amp_pervlt = 36.364
指南针¶
Pixhawk6C/Mini 具有内置指南针。由于存在潜在干扰,(飞行)控制器通常与外部 I2C 罗盘一起使用,作为 GPS/Compass 组合的一部分。
GPIO¶
FMU PWM 输出可用作 GPIO(继电器、按钮、RPM 等)。要使用它们,需要设置输出的 SERVOx_FUNCTION 为-1。参见 GPIO 页面获取更多信息。
ArduPilot 中 PIN 变量的 GPIO 编号为
FMU 针脚:
PWM1 50
PWM2 51
PWM3 52
PWM4 53
PWM5 54
PWM6 55
PWM7 56(非微型 6C)
PWM8 57(非迷你 6C)
模拟输入¶
Pixhawk6C 有一个模拟 RSSI 输入引脚:
模拟 3.3V RSSI 输入引脚 = 103
连接器¶
除非另有说明,所有连接器均为 JST GH
加载固件¶
电路板预装了与 ArduPilot 兼容的引导加载器,可通过任何与 ArduPilot 兼容的地面站加载 xxxxxx.apj 固件文件。
可以找到这些电路板的固件 这里 子文件夹中标有 "Pixhawk6C "的文件夹。
布局和尺寸¶
参见 Pixhawk6C 尺寸