RTK GPS 校正(固定基线)¶
使用 RTK(实时运动学)可以提高 GPS 的正常位置报告精度。使用 Ublox M8N 这一代 GPS,正常的 GPS 定位精度为 3-5 米。如果您所在的全球地区有 SBAS(基于卫星的增强服务)地理同步卫星向 GPS 报告一般传播条件和修正,那么精度可以提高到 1 米范围。但是,通过使用实时运动学修正数据和较新的 F9P 系列 GPS,可以获得厘米级的精度范围。
每颗卫星的传播和定时校正(RTCM 数据)可以通过几种方式输入载具的 RTK GPS:
来自与 GCS 连接的本地 RTK 基站,GCS 也与飞行器连接(通过 MAVLink)。
通过互联网连接的 GCS 转发来自 NTRIP 服务器的 RTCM 修正数据,GCS 也与载具连接(通过 MAVLink)。
从本地 RTK 基站直接无线传输到车载 GPS 的辅助 UART 端口
方法 1¶
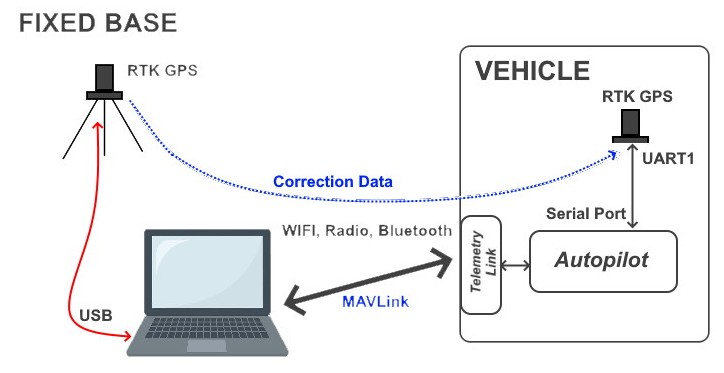
Mission Planner地面站和 QGC 都允许通过 USB 连接外部 RTK Base GPS。校正数据从基本单元通过 GCS 程序传递到飞行器与 GCS 的 MAVLink 连接,为飞行器的 RTK GPS 提供校正数据,使其位置报告更加精确。
这种方法成功的关键在于精确地知道或确定 RTK 基站的位置。通常,这需要 GCS 命令 RTK 基站 GPS 进行 "自测"。全球定位系统进行多次测量,确定其平均位置,应用临时校正,并继续改进其位置偏差,直到在给定的时间段(通常为 60 秒)内测量误差在设定的临界值(通常为几米)之内。然后,全球定位系统将其作为自己的位置,并开始向全球定位系统输出校正数据,以便转发给载具的全球定位系统。
如果知道 RTK 基地的确切位置,可以使用 UBlox 编程工具或Mission Planner地面站(如果之前已经 "测入 "该位置)直接将其编程到 RTK 基地中。
设置¶
载具:串行 GPS 的正常设置 (GPS1_TYPE = 1)或 DroneCAN GPS (GPS1_TYPE = 9)
通过 USB 将 RTK GPS 连接到运行 Mission Planner 或 QGC 的 PC 上。
首先,您必须在Mission Planner地面站中 "调查 "全球定位系统。
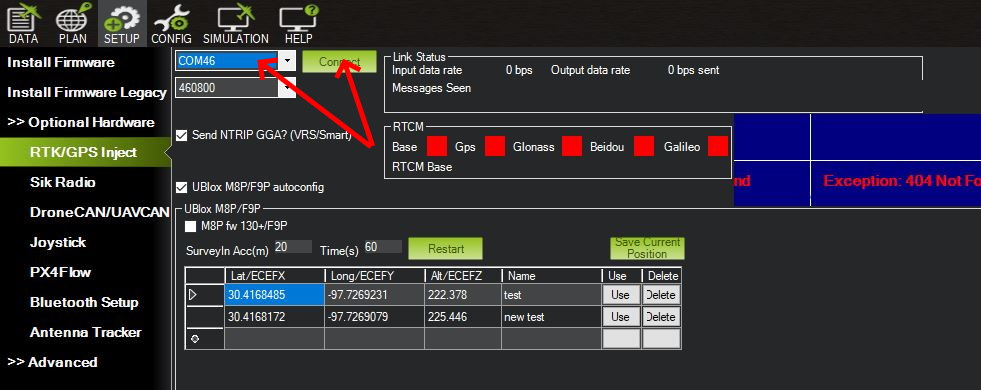
将 GPS 连接到 PC 后,启动 Mission Planner,输入所连接的 COM 端口并按 "连接"。链接状态 "应开始显示正在输入的数据,锁定的卫星星座将显示为绿色指示灯。
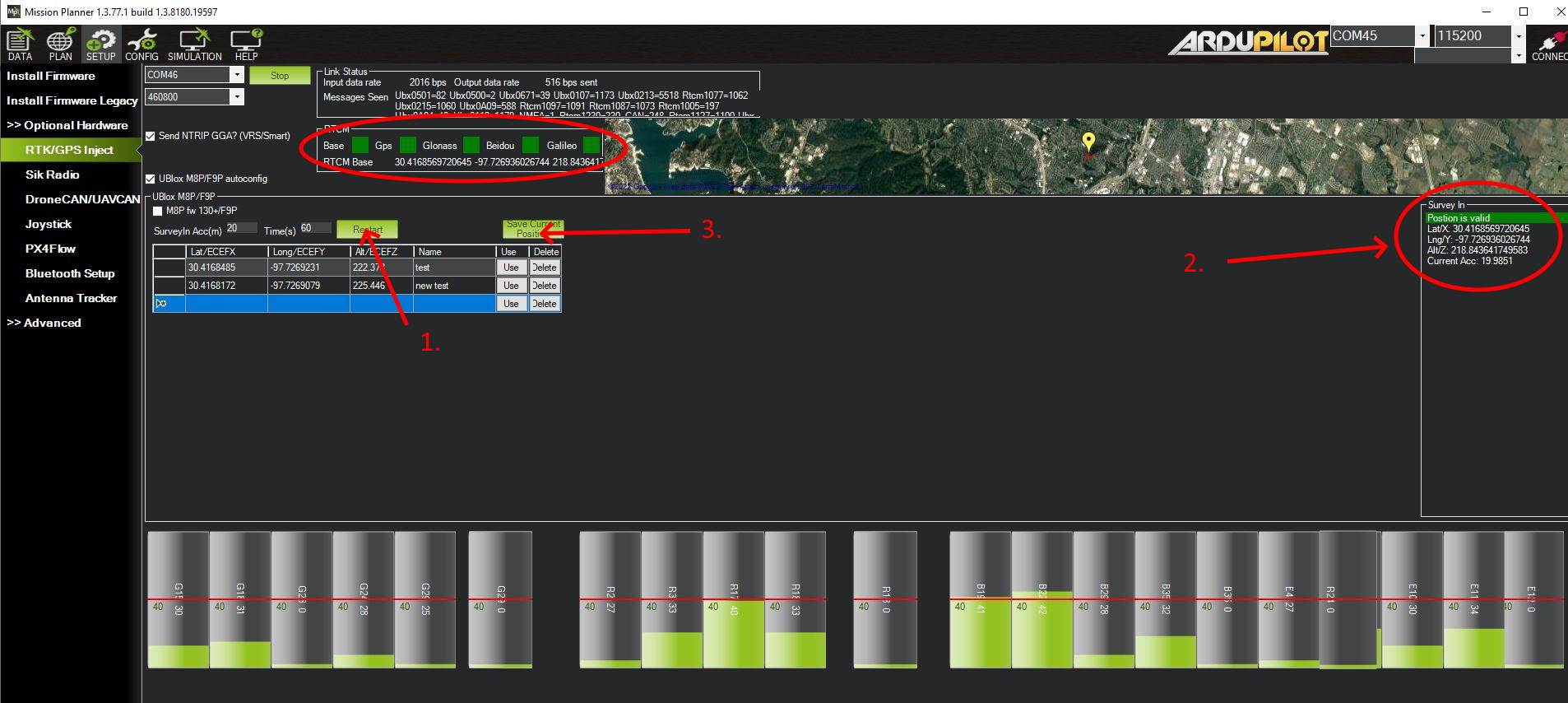
然后按下 "RESTART(重启)"按钮(图片中的 #1),使用 SurveyIn Acc(m) 和 Time(s) 开始 "survey-in "过程。Ublox 建议 SurveyIn ACC 不超过 5 米。通常使用 2 米。在图中的 #2 中,可以监控勘测状态的进度,直至获得 "位置有效"。
获得位置后,您可以将其保存在列表中,以备将来基地放置在该精确位置时使用,从而避免再次进行勘测。要使用现有位置,首先要确保连接到Mission Planner地面站 PC 的 GPS 确实位于该确切位置,然后按下列表中该位置的 "使用 "按钮。飞行器的 RTK 更新将立即开始。
载具 GPS 处理 RTK 数据后,其状态将变为 "RTK 浮动",然后在 GCS HUD 中变为 "RTK 固定",表示可以使用。"RTK 浮动 "表示正在使用修正数据,但尚未转入最高精度模式。
方法 2¶
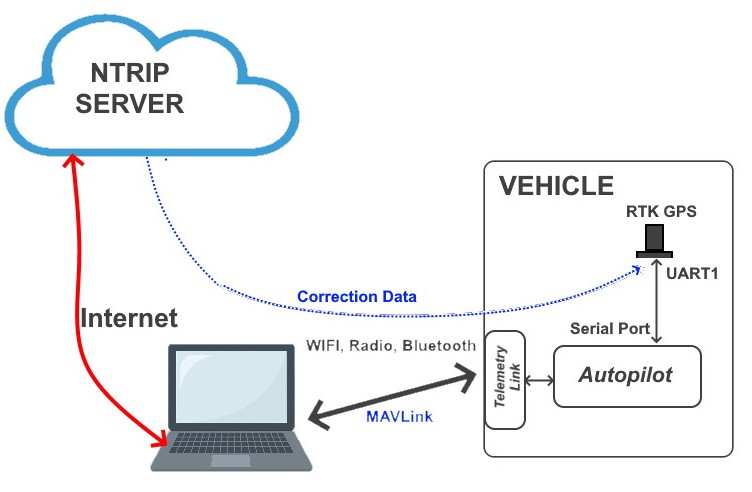
有一些基于互联网的服务可以从链接到该服务的基地提供校正数据。它们通过 NTRIP 协议在互联网上提供修正数据。Mission Planner地面站和 QGC 可以连接到这些服务器,并通过 MAVLink 连接将数据转发给飞行器。
如果在距离载具位置 100 千米左右的范围内有基站提供实时修正数据,那么服务通常会令人满意。信号源距离载具每 10 千米,误差范围就会增加 ~ 1-1.5 厘米。有些服务机构会为其站点网络内的任何位置提供插值数据,如果站点距离载具位置超过 100 公里,有时也可以成功使用插值数据。
这些服务有些是免费的,有些是收费的。
设置¶
首先,确保载具已连接到 GCS,并且有一个 GPS 3D 锁定.然后在全球监控系统上:
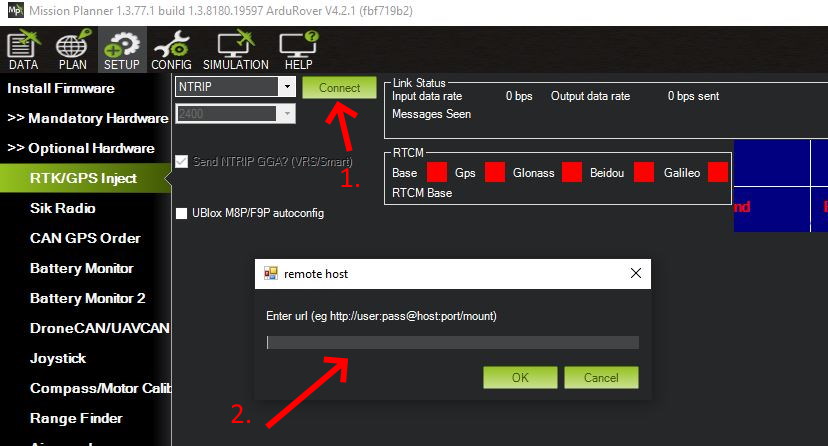
从下拉框中选择 "NTRIP",然后按 "连接"。将出现一个对话框(#2.),输入 NTRIP 服务器的登录信息。
登录方式通常为
http://username:password@host:port/mount
其中,"host "是 NTRIP 服务器 URL,端口由服务指定(RTCM3.1 数据流通常为 2101),挂载点将是服务指定的您要使用的台站(离您所在位置最近的台站),通常类似于 "P807_RTCM "或 "Evermount234",无论服务如何命名。
如果连接成功,数据将开始显示在顶部的 "链接状态 "框中,并发送到所连接载具的 RTK GPS。
方法 3¶
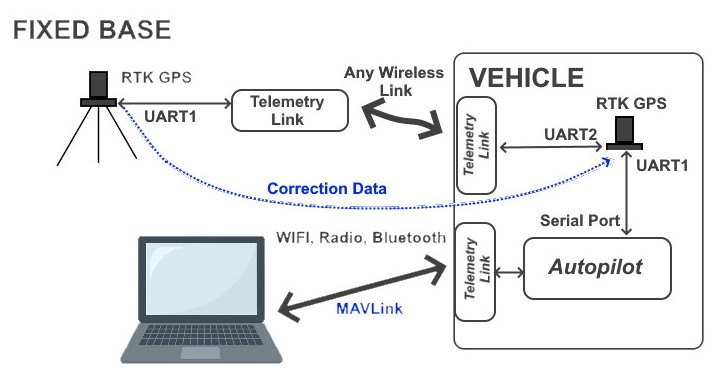
可以对用作固定基站的 GPS 进行编程,使其自动开始 调查中 在上电后自动运行,并在完成后开始从 UART2 端口发送 RTCM 修正数据。通过连接透明的 RF 调制解调器(基于无线电或 WIFI),可以直接将修正数据传输到载具的 UART2 端口。
这需要使用 UBlox 配置工具配置 Base RTK GPS。参见 Sparkfun 的教程 了解更多信息。
设置¶
参见 关于设置的博文
备注
有些 RTK GPS 已配置为专用的 BASE 操作,每次开机都会自动 "survey-in"。基本型号的 Blicube GRTK 系统就是一个例子。
鸣谢¶
感谢 Qiotek 感谢他们提供了本文所用的(飞行)控制器和 GPS。